Das könnte Ihnen auch gefallen
- Ganesh M Shanbhag, 17skcmd048, Project ReportDokument77 SeitenGanesh M Shanbhag, 17skcmd048, Project ReportGururaj RevankarNoch keine Bewertungen
- Detect Gas Leakage with Arduino, MQ5 Sensor and GSM ModuleDokument28 SeitenDetect Gas Leakage with Arduino, MQ5 Sensor and GSM ModuleGururaj RevankarNoch keine Bewertungen
- Automatic Solar Tracking SystemDokument10 SeitenAutomatic Solar Tracking SystemIJIERT-International Journal of Innovations in Engineering Research and TechnologyNoch keine Bewertungen
- OP-GONT 90211VW - With VOIPDokument3 SeitenOP-GONT 90211VW - With VOIPGururaj RevankarNoch keine Bewertungen
- 2709330317skcmd048 Project Report 2018 - DBDokument17 Seiten2709330317skcmd048 Project Report 2018 - DBGururaj RevankarNoch keine Bewertungen
- Artificial Speech SynthesisDokument22 SeitenArtificial Speech SynthesisGururaj RevankarNoch keine Bewertungen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5783)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (890)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (72)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (119)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- The Effects of Oar-Shaft Stiffness andDokument9 SeitenThe Effects of Oar-Shaft Stiffness andValentina DiamanteNoch keine Bewertungen
- STC PDFDokument34 SeitenSTC PDFМиша ШаулаNoch keine Bewertungen
- Land Rover Range Rover Owners Manual 2007Dokument358 SeitenLand Rover Range Rover Owners Manual 2007PetreCaracaleanu0% (1)
- Compression Molding of Gypsum Blocks Using Ecological Brick MachinesDokument11 SeitenCompression Molding of Gypsum Blocks Using Ecological Brick Machinessami fanuaelNoch keine Bewertungen
- 6013 GCS-CONTROLS enDokument5 Seiten6013 GCS-CONTROLS enMuhammad SyaqirinNoch keine Bewertungen
- Techint Group Brochure 2013Dokument100 SeitenTechint Group Brochure 2013MD AFROZ RAZANoch keine Bewertungen
- Casa Cook ArvindDokument65 SeitenCasa Cook ArvindLEAN MauritiusNoch keine Bewertungen
- Finger Print Based Voting System For Rigging Free Governing SystemDokument2 SeitenFinger Print Based Voting System For Rigging Free Governing SystemArvind TilotiaNoch keine Bewertungen
- Premchand Deliverance Download in PDFDokument4 SeitenPremchand Deliverance Download in PDFRiya W100% (3)
- Crusher Type Part Number Description Weight (KG)Dokument3 SeitenCrusher Type Part Number Description Weight (KG)Juvenal CorreiaNoch keine Bewertungen
- AR M205 BrochureDokument4 SeitenAR M205 BrochurenickypanzeNoch keine Bewertungen
- Contact Details For Medical Schools by PostcodeDokument13 SeitenContact Details For Medical Schools by PostcodeHeena R ModiNoch keine Bewertungen
- Eko 75 Spare Part ListDokument23 SeitenEko 75 Spare Part ListРустам Хайретдинов100% (1)
- Microsoft PowerPoint - ECHOCARDIOGRAPHY IN ADULT CONGENITAL HEART DISEASE PDFDokument51 SeitenMicrosoft PowerPoint - ECHOCARDIOGRAPHY IN ADULT CONGENITAL HEART DISEASE PDFHanafieHeluthNoch keine Bewertungen
- Effect of Usage of Sinter in BOF Steelmaking As A Replacement To Iron Ore As Coolant For Thermal BalanceDokument11 SeitenEffect of Usage of Sinter in BOF Steelmaking As A Replacement To Iron Ore As Coolant For Thermal BalancesomnathNoch keine Bewertungen
- D-Glucitol (420i) Dextrose MonohydrateDokument3 SeitenD-Glucitol (420i) Dextrose MonohydrateSilvia Melendez HNoch keine Bewertungen
- Chips Unlimited Blend LibraryDokument20 SeitenChips Unlimited Blend Librarymizan sallehNoch keine Bewertungen
- Winbond Elec W25q128jvfiq c111478Dokument75 SeitenWinbond Elec W25q128jvfiq c111478Guilherme El KadriNoch keine Bewertungen
- 2G - 4G Network Module - Data Sheet - EnglishDokument8 Seiten2G - 4G Network Module - Data Sheet - EnglishbbwroNoch keine Bewertungen
- Discourse on Colonialism and CivilizationDokument48 SeitenDiscourse on Colonialism and CivilizationEmir özerNoch keine Bewertungen
- Geneaid DNA Reagent Plant GR200Dokument4 SeitenGeneaid DNA Reagent Plant GR200Gandi SogandiNoch keine Bewertungen
- Understanding the Four Aspects of EmotionsDokument13 SeitenUnderstanding the Four Aspects of EmotionsRaymond FaeldoñaNoch keine Bewertungen
- Descent of Darwin - Theosophy WatchDokument17 SeitenDescent of Darwin - Theosophy Watchjorge_lazaro_6Noch keine Bewertungen
- Minicap FTC260, FTC262: Technical InformationDokument20 SeitenMinicap FTC260, FTC262: Technical InformationAmanda PorterNoch keine Bewertungen
- Lesson Plan 2aDokument5 SeitenLesson Plan 2aapi-332424736Noch keine Bewertungen
- BT Word FormsDokument11 SeitenBT Word FormsNguyên TrungNoch keine Bewertungen
- Anatomy Mckinley PPT Chapter 1Dokument65 SeitenAnatomy Mckinley PPT Chapter 1Rosa AlcantarNoch keine Bewertungen
- JASA 1st Anniversary Issue 2012 PDFDokument103 SeitenJASA 1st Anniversary Issue 2012 PDFSuresh NatarajanNoch keine Bewertungen
- Exercise - 8.1 NewDokument24 SeitenExercise - 8.1 NewAkriti Sharma 757Noch keine Bewertungen
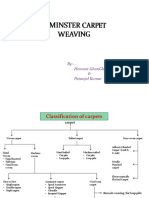
- Axminster CarpetDokument19 SeitenAxminster Carpetrohit sinhaNoch keine Bewertungen