Das könnte Ihnen auch gefallen
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Von EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Noch keine Bewertungen
- Samsung Plasma Training ManualDokument57 SeitenSamsung Plasma Training ManualevaristoNoch keine Bewertungen
- CHAPTER 2 (Autosaved)Dokument76 SeitenCHAPTER 2 (Autosaved)dray09100% (1)
- Siemens Harmonics Best Practice PresentationDokument40 SeitenSiemens Harmonics Best Practice PresentationVijai PrasathNoch keine Bewertungen
- 326 108 Icepower 200asc Class D Amp With Power Supply Module 1x200w Data SheetDokument25 Seiten326 108 Icepower 200asc Class D Amp With Power Supply Module 1x200w Data SheetnotlianNoch keine Bewertungen
- Proteus Lab Manual PDFDokument91 SeitenProteus Lab Manual PDFAnie Said100% (1)
- N700 CatalogDokument40 SeitenN700 CatalogtranskingNoch keine Bewertungen
- Complete Front End Solutions For Weigh Scales PDFDokument5 SeitenComplete Front End Solutions For Weigh Scales PDFmahamd saiedNoch keine Bewertungen
- Max Signal Properly TipsTrick Acq Analog Signals DS00004225Dokument21 SeitenMax Signal Properly TipsTrick Acq Analog Signals DS00004225jay lowkeyNoch keine Bewertungen
- Isolated Multiple Output Flyback Converter Design Using TL494Dokument25 SeitenIsolated Multiple Output Flyback Converter Design Using TL494lordgtyNoch keine Bewertungen
- Tda 9556Dokument16 SeitenTda 9556Miloud ChouguiNoch keine Bewertungen
- TXM24-C Hardware Manual - 920-0088D-lgDokument23 SeitenTXM24-C Hardware Manual - 920-0088D-lgMarcus TornovskyNoch keine Bewertungen
- Stcs1A: 1.5 A Max Constant Current LED DriverDokument19 SeitenStcs1A: 1.5 A Max Constant Current LED DriverUdit AgrawalNoch keine Bewertungen
- Stcs 1Dokument17 SeitenStcs 1joffre marizacaNoch keine Bewertungen
- PIC16/PIC18 ADC Technical Brief: 2018 Microchip Technology Inc. 90003194a-Page 1Dokument27 SeitenPIC16/PIC18 ADC Technical Brief: 2018 Microchip Technology Inc. 90003194a-Page 1Java Papa DoqNoch keine Bewertungen
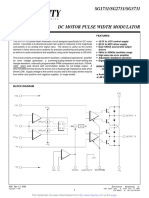
- SG1731/SG2731/SG3731: Features DescriptionDokument5 SeitenSG1731/SG2731/SG3731: Features DescriptionRavindra MaraweeraNoch keine Bewertungen
- 12-V Voltage Sensing Circuit With An Isolated AmplifierDokument8 Seiten12-V Voltage Sensing Circuit With An Isolated AmplifierSirJones KekapohNoch keine Bewertungen
- ECE462 Motor Lab Experiment3Dokument14 SeitenECE462 Motor Lab Experiment3eng_abdelghany1979Noch keine Bewertungen
- Infineon IPW60R018CFD7 DS v02 - 00 ENDokument14 SeitenInfineon IPW60R018CFD7 DS v02 - 00 ENdineshNoch keine Bewertungen
- DTMF Receiver For Telephones: BU8874 / BU8874FDokument10 SeitenDTMF Receiver For Telephones: BU8874 / BU8874FYazan HaidarNoch keine Bewertungen
- IPD60R360P7 InfineonDokument14 SeitenIPD60R360P7 InfineonJimmy Varela TraderNoch keine Bewertungen
- Samsung Plasma Training ManualDokument57 SeitenSamsung Plasma Training ManualDamiao100% (1)
- sg1526 Rev1.2Dokument12 Seitensg1526 Rev1.2ChrisNoch keine Bewertungen
- Transformador de PulsoDokument22 SeitenTransformador de PulsoFreddy de los SantosNoch keine Bewertungen
- Infineon IPZA60R024P7 DS v02 - 00 ENDokument14 SeitenInfineon IPZA60R024P7 DS v02 - 00 ENdineshNoch keine Bewertungen
- AS5145H/AS5145A/AS5145B: 1 General DescriptionDokument37 SeitenAS5145H/AS5145A/AS5145B: 1 General DescriptionsekoNoch keine Bewertungen
- Layout Guidelines For ControllersDokument7 SeitenLayout Guidelines For Controllersnrupavesh nNoch keine Bewertungen
- Ds sg1526b Rev1.2Dokument12 SeitenDs sg1526b Rev1.2Enovar Pérez EscalanteNoch keine Bewertungen
- NTE7073 Hybrid Switching Regulator Absolute Maximum RatingsDokument2 SeitenNTE7073 Hybrid Switching Regulator Absolute Maximum RatingsEvodio PerezNoch keine Bewertungen
- Getting Started With ADCC For PIC18 PDFDokument23 SeitenGetting Started With ADCC For PIC18 PDFzhangsanNoch keine Bewertungen
- Ads 131 M 02Dokument94 SeitenAds 131 M 02Paulo PecegueiroNoch keine Bewertungen
- Stl16N65M2: N-Channel 650 V, 0.325 Typ., 7.5 A Mdmesh M2 Power Mosfet in A Powerflat™ 5X6 HV PackageDokument16 SeitenStl16N65M2: N-Channel 650 V, 0.325 Typ., 7.5 A Mdmesh M2 Power Mosfet in A Powerflat™ 5X6 HV PackageJihan ElectronicNoch keine Bewertungen
- Circuit Function and Benefits: AD9834 AD5620Dokument3 SeitenCircuit Function and Benefits: AD9834 AD5620Anonymous oyUAtpKNoch keine Bewertungen
- Snva 465 ADokument13 SeitenSnva 465 Aeneas.baroneNoch keine Bewertungen
- IPDD60R170CFD7Dokument15 SeitenIPDD60R170CFD7senayan pltdNoch keine Bewertungen
- Infineon CDM10V DS v01 - 03 ENDokument20 SeitenInfineon CDM10V DS v01 - 03 ENJakieNoch keine Bewertungen
- Ask The Application Engineer-33 All About Direct Digital SynthesisDokument5 SeitenAsk The Application Engineer-33 All About Direct Digital SynthesisleuteriosNoch keine Bewertungen
- Mosfet: IPD60R180P7SDokument14 SeitenMosfet: IPD60R180P7SMauricio EsquivelNoch keine Bewertungen
- Infineon IPP60R360P7 DS v02 - 03 ENDokument14 SeitenInfineon IPP60R360P7 DS v02 - 03 ENgustavoNoch keine Bewertungen
- Mosfet SeriesDokument14 SeitenMosfet Seriesajar manuNoch keine Bewertungen
- Hardware and Layout Design Considerations For DDRDokument48 SeitenHardware and Layout Design Considerations For DDRmuralikonathamNoch keine Bewertungen
- Boost Controller: TDA4863 Power Factor Controller IC For High Power Factor and Low THDDokument27 SeitenBoost Controller: TDA4863 Power Factor Controller IC For High Power Factor and Low THDSaifuddin SidikiNoch keine Bewertungen
- TK 2202 2206 MsDokument43 SeitenTK 2202 2206 Msperico_007Noch keine Bewertungen
- MAX4896Dokument14 SeitenMAX4896sree hariNoch keine Bewertungen
- Infineon IPD60R170CFD7 DataSheet v02 - 02 EN 1731701Dokument15 SeitenInfineon IPD60R170CFD7 DataSheet v02 - 02 EN 1731701Fenil DedhiaNoch keine Bewertungen
- CH 2Dokument14 SeitenCH 2PeterhayatNoch keine Bewertungen
- Prensa Slua601Dokument29 SeitenPrensa Slua601Miguelina RossiNoch keine Bewertungen
- Tda 8358Dokument20 SeitenTda 8358Alexander CastroNoch keine Bewertungen
- Ad5308 5318 5328 PDFDokument28 SeitenAd5308 5318 5328 PDFAndres Fernandez FernandezNoch keine Bewertungen
- Manual 1-808Dokument8 SeitenManual 1-808Torres Toledo JttNoch keine Bewertungen
- Gate Driver For N-Channel Mosfet: Experiment 6Dokument34 SeitenGate Driver For N-Channel Mosfet: Experiment 6Noona MigleiNoch keine Bewertungen
- TAC Xenta 421A/422A: Universal Input and Digital Output ModuleDokument5 SeitenTAC Xenta 421A/422A: Universal Input and Digital Output ModuleJose sanchezNoch keine Bewertungen
- T D A 4 8 6 3 - Getting Started With T D A 4 8 6 3: AN-PFC-TDA 4863-2Dokument16 SeitenT D A 4 8 6 3 - Getting Started With T D A 4 8 6 3: AN-PFC-TDA 4863-2Andi Mahardi HendrawanNoch keine Bewertungen
- MC145151 2Dokument26 SeitenMC145151 2elvisspeedyNoch keine Bewertungen
- Differential Two-Wire Hall Effect Sensor IC TLE4942 TLE4942CDokument19 SeitenDifferential Two-Wire Hall Effect Sensor IC TLE4942 TLE4942C1553Noch keine Bewertungen
- 7805 Regulator DescriptionDokument4 Seiten7805 Regulator DescriptionyeateshwarriorNoch keine Bewertungen
- Nuvoton Tech NCT3101S - C249426Dokument20 SeitenNuvoton Tech NCT3101S - C249426zulham syahputraNoch keine Bewertungen
- NCT3101SDokument20 SeitenNCT3101SfreddyNoch keine Bewertungen
- Dynamic Testing of Highspeed Adcs Part 2Dokument17 SeitenDynamic Testing of Highspeed Adcs Part 2ketkyhuNoch keine Bewertungen
- 16-Bit Switchable Current Sources: - ADC WithDokument32 Seiten16-Bit Switchable Current Sources: - ADC WithPrashant ErandeNoch keine Bewertungen
- Ad7403 1517424Dokument25 SeitenAd7403 1517424Mohammad AsadiNoch keine Bewertungen
- Pi Mbus 300 PDFDokument121 SeitenPi Mbus 300 PDFhipercortexNoch keine Bewertungen
- STM32F40Xxx PDFDokument202 SeitenSTM32F40Xxx PDFLorisBruzziNoch keine Bewertungen
- USB Programmer SchematicDokument1 SeiteUSB Programmer Schematicnguyen thuan100% (1)
- 'Window' Effect in The Analysis of Frequency Dependence of Ionic ConductivityDokument5 Seiten'Window' Effect in The Analysis of Frequency Dependence of Ionic Conductivitynguyen thuanNoch keine Bewertungen
- Aquaread BlackBox Instruction Manual Revision NDokument69 SeitenAquaread BlackBox Instruction Manual Revision Nnguyen thuanNoch keine Bewertungen
- Analog Design PDFDokument101 SeitenAnalog Design PDFGabriela ValentinaNoch keine Bewertungen
- Circuit Note: Fully Isolated Conductivity Measurement Data Acquisition SystemDokument10 SeitenCircuit Note: Fully Isolated Conductivity Measurement Data Acquisition Systemnguyen thuanNoch keine Bewertungen
- Circuit Note: High Accuracy Impedance Measurements Using 12-Bit Impedance ConvertersDokument6 SeitenCircuit Note: High Accuracy Impedance Measurements Using 12-Bit Impedance Convertersnguyen thuanNoch keine Bewertungen
- Manual AP 2000Dokument129 SeitenManual AP 2000nguyen thuanNoch keine Bewertungen
- Tinyswitch 4 Family Datasheet 217694Dokument27 SeitenTinyswitch 4 Family Datasheet 217694nguyen thuanNoch keine Bewertungen
- STM32F40Xxx PDFDokument202 SeitenSTM32F40Xxx PDFLorisBruzziNoch keine Bewertungen
- Aquaread BlackBox Instruction Manual Revision NDokument69 SeitenAquaread BlackBox Instruction Manual Revision Nnguyen thuanNoch keine Bewertungen
- En DM00039084 PDFDokument34 SeitenEn DM00039084 PDFHưng NgôNoch keine Bewertungen
- Circuit Note: Fully Isolated Conductivity Measurement Data Acquisition SystemDokument10 SeitenCircuit Note: Fully Isolated Conductivity Measurement Data Acquisition Systemnguyen thuanNoch keine Bewertungen
- Circuit Note: High Accuracy Impedance Measurements Using 12-Bit Impedance ConvertersDokument6 SeitenCircuit Note: High Accuracy Impedance Measurements Using 12-Bit Impedance Convertersnguyen thuanNoch keine Bewertungen
- V T-7 3 7 S P: Operation ManualDokument58 SeitenV T-7 3 7 S P: Operation ManualJuan Carlos FiallosNoch keine Bewertungen
- Clampon Dsp-06 Particle Monitor: Ultrasonic Intelligent SensorsDokument8 SeitenClampon Dsp-06 Particle Monitor: Ultrasonic Intelligent SensorsJorge Torrez RojasNoch keine Bewertungen
- Dynamic Analysis of Soil-Steel Composite Bridges For High Speed Railway TrafficDokument103 SeitenDynamic Analysis of Soil-Steel Composite Bridges For High Speed Railway Traffickwon777100% (1)
- Tda7000 An192Dokument14 SeitenTda7000 An192Tim HoadNoch keine Bewertungen
- ADXL337Dokument17 SeitenADXL337Anlles ChicaizaNoch keine Bewertungen
- MR-JE Catalogue PDFDokument84 SeitenMR-JE Catalogue PDFDivNoch keine Bewertungen
- Configurationexample x8 s7-1200 Uss v1d0 en PDFDokument35 SeitenConfigurationexample x8 s7-1200 Uss v1d0 en PDFDragoslav DzolicNoch keine Bewertungen
- Input FilterDokument7 SeitenInput FilterIhya UlumuddinNoch keine Bewertungen
- Senior Design Project Proposal Form: Project Title: Professor(s) Name(s) : Number of Students: Students QualificationsDokument1 SeiteSenior Design Project Proposal Form: Project Title: Professor(s) Name(s) : Number of Students: Students QualificationsAbdulmajeed AlmohimeedNoch keine Bewertungen
- Precision 2.5V FGA™ Voltage Reference: X60008B-25 X60008C-25 X60008D-25Dokument10 SeitenPrecision 2.5V FGA™ Voltage Reference: X60008B-25 X60008C-25 X60008D-25Alejandro HerediaNoch keine Bewertungen
- Thesis Base PDFDokument237 SeitenThesis Base PDFAnonymous AMjDOJ0lNoch keine Bewertungen
- Noise FilterDokument46 SeitenNoise FilterTanutcha SanovaNoch keine Bewertungen
- Simulation and Design of A Waveform Generator Based On DDS TechnologyDokument7 SeitenSimulation and Design of A Waveform Generator Based On DDS TechnologyMounith HNoch keine Bewertungen
- CIIT Electronics Lab ManualDokument80 SeitenCIIT Electronics Lab ManualNaveed SultanNoch keine Bewertungen
- Electronic Devices Circuits (Edc) Laboratory Manual: For Ii / Iv B.E (Ece) : I - SemesterDokument80 SeitenElectronic Devices Circuits (Edc) Laboratory Manual: For Ii / Iv B.E (Ece) : I - SemesterDominic BoseNoch keine Bewertungen
- 160A 460V 3-phase passive filter for variable speed drivesDokument5 Seiten160A 460V 3-phase passive filter for variable speed drivesAllan SouzaNoch keine Bewertungen
- AS3415/AS3435: Integrated Active Noise Cancelling Solution With Bypass FeatureDokument99 SeitenAS3415/AS3435: Integrated Active Noise Cancelling Solution With Bypass FeatureRoger SacchelliNoch keine Bewertungen
- ECE 391: Quarter and Half Wave T-line BehaviorDokument5 SeitenECE 391: Quarter and Half Wave T-line BehaviorAnu RadhaNoch keine Bewertungen
- Altivar 16 AC Drive: CatalogDokument33 SeitenAltivar 16 AC Drive: CatalogMartin Rojas LujanNoch keine Bewertungen
- Understanding Transistor CircuitsDokument22 SeitenUnderstanding Transistor CircuitscamarjoNoch keine Bewertungen
- U6100 User Guide: Document Name: Date: Jul 31, 2008 Docid: U6100 - User - Guide - V1.2 Status: Confidential / ReleasedDokument32 SeitenU6100 User Guide: Document Name: Date: Jul 31, 2008 Docid: U6100 - User - Guide - V1.2 Status: Confidential / Releaseddjnhh0anNoch keine Bewertungen
- Chapter 4 - Analog Signal ConditioningDokument85 SeitenChapter 4 - Analog Signal ConditioningVon JinNoch keine Bewertungen
- Syllabus For Apece, University of DhakaDokument20 SeitenSyllabus For Apece, University of DhakaSazzad Hossain LemonNoch keine Bewertungen
- PWRSPKR 15W ManualDokument4 SeitenPWRSPKR 15W ManualJoonki YunNoch keine Bewertungen
- User and Installation Manual: Output Filter FN5420 and RWK5420Dokument54 SeitenUser and Installation Manual: Output Filter FN5420 and RWK5420jigsaiNoch keine Bewertungen