Das könnte Ihnen auch gefallen
- Transformadas de FourierDokument19 SeitenTransformadas de FourierjeffersansNoch keine Bewertungen
- PO.09-Vistoria Final e Entrega Da Obra Versao 01Dokument6 SeitenPO.09-Vistoria Final e Entrega Da Obra Versao 01felipepenedoNoch keine Bewertungen
- 9-Certificado CipaDokument2 Seiten9-Certificado CipaCláudio W. Sousa100% (1)
- Transformada Laplace e Inversa PDFDokument23 SeitenTransformada Laplace e Inversa PDFAndreea DrăghiciNoch keine Bewertungen
- Apostila - Analise de Sistemas LinearesDokument46 SeitenApostila - Analise de Sistemas LinearesMendel Tavares PassosNoch keine Bewertungen
- A1 RevisoMatematica LaplaceDokument21 SeitenA1 RevisoMatematica LaplacebrineniziiziNoch keine Bewertungen
- Aula 1Dokument15 SeitenAula 1Gabriela AlcantaraNoch keine Bewertungen
- Aula 9 Transformada de LaplaceDokument54 SeitenAula 9 Transformada de LaplaceJoyceCrisNoch keine Bewertungen
- Modelagem CircuitosDokument50 SeitenModelagem CircuitosJeremias RibeiroNoch keine Bewertungen
- 3.a Aula - Sist. Lineares - Linearização de SistemasDokument51 Seiten3.a Aula - Sist. Lineares - Linearização de SistemasFrancisco SantosNoch keine Bewertungen
- ENG-10933 - Controle de Processos - Aula 08Dokument15 SeitenENG-10933 - Controle de Processos - Aula 08Alessandro JesusNoch keine Bewertungen
- Modelos de ProcessosDokument34 SeitenModelos de ProcessosJanaina MaiaNoch keine Bewertungen
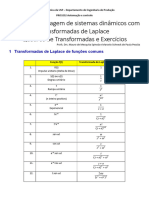
- PRO3252 A04 Laplace Formulas e Exercicios 2023Dokument5 SeitenPRO3252 A04 Laplace Formulas e Exercicios 2023Diegocalixtohotmail.com CalixtoNoch keine Bewertungen
- 04 - Funcao de TransferenciaDokument17 Seiten04 - Funcao de TransferencialeagueOfHU3 BRNoch keine Bewertungen
- 2 - Transformada de Laplace Aplicada A Circuitos Elétricos PDFDokument6 Seiten2 - Transformada de Laplace Aplicada A Circuitos Elétricos PDFLuiz Cezar WanderleyNoch keine Bewertungen
- Nota de Aula - Transf LaplaceDokument19 SeitenNota de Aula - Transf LaplaceCicero MelloNoch keine Bewertungen
- Erro em Regime PermanenteDokument13 SeitenErro em Regime PermanenteRaphael NevesNoch keine Bewertungen
- Apostila Controle de Processos e Automação IndustrialconflictedDokument71 SeitenApostila Controle de Processos e Automação IndustrialconflictedEvando Pereira dos SantosNoch keine Bewertungen
- Aula 8 - Análise de FourierDokument42 SeitenAula 8 - Análise de Fourierslipcout100% (1)
- Tema4 - Transformadas (Laplace e Fourier)Dokument67 SeitenTema4 - Transformadas (Laplace e Fourier)Remerson AvelarNoch keine Bewertungen
- Apostila Transformada de Laplace PDFDokument11 SeitenApostila Transformada de Laplace PDFMarcelo Lopes VieiraNoch keine Bewertungen
- Livro UDokument44 SeitenLivro Upaulo gontranNoch keine Bewertungen
- Slides Yared Cap9Dokument29 SeitenSlides Yared Cap9EMANUEL FRANCISCO MAGALHAES DE AVILANoch keine Bewertungen
- Aula MóduloXDokument7 SeitenAula MóduloXAndreia SemedoNoch keine Bewertungen
- Formulários de Consulta - Transformada de Laplace - Ckt5-Tab1Dokument2 SeitenFormulários de Consulta - Transformada de Laplace - Ckt5-Tab1AntonioNoch keine Bewertungen
- Teoria de Controle ModernoDokument231 SeitenTeoria de Controle ModernoValéria Lima Antônio FilhoNoch keine Bewertungen
- 02 Laplace PDFDokument27 Seiten02 Laplace PDFNey Jr.Noch keine Bewertungen
- 2021 Ici 1S 04Dokument4 Seiten2021 Ici 1S 04Matheus IsoldiNoch keine Bewertungen
- Material ProfessorDokument17 SeitenMaterial ProfessorDouglas LourençoNoch keine Bewertungen
- Controle 02 Transformada de Laplace 2 Por PagDokument17 SeitenControle 02 Transformada de Laplace 2 Por PagRegis SoaresNoch keine Bewertungen
- Transformada de LaplaceDokument14 SeitenTransformada de LaplaceManuelMendesNoch keine Bewertungen
- Parte Escrita - Transformadas de Laplace e Séries de FourierDokument11 SeitenParte Escrita - Transformadas de Laplace e Séries de FourierAnanda Lago do NascimentoNoch keine Bewertungen
- Transformada de LaplaceDokument6 SeitenTransformada de Laplacetamires.bojjisNoch keine Bewertungen
- Capítulo 4 - Transformaç - o de LaplaceDokument53 SeitenCapítulo 4 - Transformaç - o de LaplaceHernane Da LuzNoch keine Bewertungen
- Transformada de LaplaceDokument17 SeitenTransformada de LaplaceVictor GomesNoch keine Bewertungen
- Respostas No Tempo - 1 e 2 OrdemDokument7 SeitenRespostas No Tempo - 1 e 2 OrdemFelipe R MerlottoNoch keine Bewertungen
- Trabalho de Controle de SistemasDokument18 SeitenTrabalho de Controle de SistemasGabryel ReisNoch keine Bewertungen
- Transfomada de LaplaceDokument48 SeitenTransfomada de LaplaceMateus OliveiraNoch keine Bewertungen
- LaplaceDokument37 SeitenLaplaceIgor CharllesNoch keine Bewertungen
- Aula08ss SlidesDokument22 SeitenAula08ss SlidesAndreyNoch keine Bewertungen
- 3 - Modelagem No Domínio Do TempoDokument67 Seiten3 - Modelagem No Domínio Do TempoEmilly CarvalhoNoch keine Bewertungen
- AOL 5 - Equações DiferenciaisDokument4 SeitenAOL 5 - Equações DiferenciaisIzamara FerreiraNoch keine Bewertungen
- Pôster IMPA Fernanda FlorDokument1 SeitePôster IMPA Fernanda FlorFernanda FlorNoch keine Bewertungen
- At Resposta Do Sistema 1 e 2 OrdemDokument31 SeitenAt Resposta Do Sistema 1 e 2 OrdemNicol Regina LangaNoch keine Bewertungen
- KL 1Dokument5 SeitenKL 1David de Almeida FiorilloNoch keine Bewertungen
- 03 AfdDokument10 Seiten03 Afdfernando25ribeirogtNoch keine Bewertungen
- CE3-Aula 3.1Dokument14 SeitenCE3-Aula 3.1Gertrudes Manuel CangundoNoch keine Bewertungen
- Aula 02Dokument25 SeitenAula 02Kmi70 Krneir0Noch keine Bewertungen
- LaplaceDokument18 SeitenLaplaceAlexandre SaviniNoch keine Bewertungen
- Controle de Processos - Aula 1Dokument27 SeitenControle de Processos - Aula 1Cassio AveiroNoch keine Bewertungen
- Introdução A Disciplina de Sistemas de Controle 1 - Aula 03 - Cristiano Quevedo AndreaDokument28 SeitenIntrodução A Disciplina de Sistemas de Controle 1 - Aula 03 - Cristiano Quevedo AndreaHackhyNoch keine Bewertungen
- Aula2 FT DiagBlocosDokument53 SeitenAula2 FT DiagBlocosbrineniziiziNoch keine Bewertungen
- 2021 Ici 1S 03Dokument4 Seiten2021 Ici 1S 03Matheus IsoldiNoch keine Bewertungen
- Transformadas (Laplace e Fourier)Dokument71 SeitenTransformadas (Laplace e Fourier)Adriana BrunettiNoch keine Bewertungen
- Laplace 562292Dokument29 SeitenLaplace 562292Marco Aurélio TrindadeNoch keine Bewertungen
- Exp Pc3aandulo Simples RoteiroDokument4 SeitenExp Pc3aandulo Simples RoteiroKenya AlvesNoch keine Bewertungen
- Transformada de LaplaceDokument27 SeitenTransformada de Laplacepimissa queirolNoch keine Bewertungen
- Aula - Indutores - Eletricidade - Magnetismo - 2010Dokument8 SeitenAula - Indutores - Eletricidade - Magnetismo - 2010olivaresneoNoch keine Bewertungen
- Presentacion y Cap 1Dokument23 SeitenPresentacion y Cap 1jvi alsNoch keine Bewertungen
- Transformada de Laplace 0Dokument44 SeitenTransformada de Laplace 0Alexandre AraujoNoch keine Bewertungen
- 24 Freqüência Com OsciloscópioDokument13 Seiten24 Freqüência Com OsciloscópioPastorMário Sérgio100% (1)
- Monitoramento srj1 16.01.24Dokument5 SeitenMonitoramento srj1 16.01.24Guilherme AlexandreNoch keine Bewertungen
- Artigo "Fatores de Qualidade Pontos Positivos Do Emprego Da Tecnologia EAD No Curso de Administração Do Consórcio CEDERJ - UFRRJ"Dokument10 SeitenArtigo "Fatores de Qualidade Pontos Positivos Do Emprego Da Tecnologia EAD No Curso de Administração Do Consórcio CEDERJ - UFRRJ"Wesley Pessanha AlvesNoch keine Bewertungen
- Cabeçote Do CilindroDokument4 SeitenCabeçote Do CilindroDiesel DynamicsNoch keine Bewertungen
- Análise Pinch Na Produção de Leite em PóDokument10 SeitenAnálise Pinch Na Produção de Leite em PópalmiereNoch keine Bewertungen
- Steck CompletoDokument60 SeitenSteck CompletoMARCIO CARVALHONoch keine Bewertungen
- Centrifuga Automatica MAC-MACmasterIII PDFDokument6 SeitenCentrifuga Automatica MAC-MACmasterIII PDFJoão Paulo Mendes RosaNoch keine Bewertungen
- Material Quimico e InflamavelDokument16 SeitenMaterial Quimico e InflamavelFF GAMERNoch keine Bewertungen
- NT 6010 Rev.02 VACDokument19 SeitenNT 6010 Rev.02 VACSérgio Leonardo CarmoNoch keine Bewertungen
- Manutenção de Motores de InduçãoDokument45 SeitenManutenção de Motores de InduçãoMarcelo Gandra FalconeNoch keine Bewertungen
- Compósitos Reforçados Com Partículas e Compósitos Reforçados Com FibrasDokument31 SeitenCompósitos Reforçados Com Partículas e Compósitos Reforçados Com FibrasAlonso Malher100% (7)
- Aula1 Excel Básico e Avançado PDFDokument77 SeitenAula1 Excel Básico e Avançado PDFAdrian Evangelist SantificNoch keine Bewertungen
- Informática e InternetDokument203 SeitenInformática e InternetFacuryNoch keine Bewertungen
- Tabela de Teste Bomba Injetora S10Dokument4 SeitenTabela de Teste Bomba Injetora S10Jose Alexandre SunhegaNoch keine Bewertungen
- Fispq Rigon PeletsDokument4 SeitenFispq Rigon PeletsValdir Fonseca VieiraNoch keine Bewertungen
- MSFZ0005 - Cvu26b Vcu30bDokument7 SeitenMSFZ0005 - Cvu26b Vcu30bValdir BerkembrockNoch keine Bewertungen
- Lei 8616 de 14 de Julho de 2003Dokument55 SeitenLei 8616 de 14 de Julho de 2003Gizelle Moreira Pinto Rozensvaig100% (1)
- Apostila AbapDokument45 SeitenApostila Abapanon_776118453Noch keine Bewertungen
- Concurso JavaWeb Cap2 Abstracao PDFDokument9 SeitenConcurso JavaWeb Cap2 Abstracao PDFValetinoHerreraNoch keine Bewertungen
- Terceiro SetorDokument16 SeitenTerceiro SetorvaniamarNoch keine Bewertungen
- Livro de Fisica IDokument165 SeitenLivro de Fisica Ivanderlei ongarato100% (2)
- Módulo Fotovoltaico Jinko Mono 390w Jkm390m-72-VDokument2 SeitenMódulo Fotovoltaico Jinko Mono 390w Jkm390m-72-VP&D CarmehilNoch keine Bewertungen
- AV FundaçõesDokument4 SeitenAV FundaçõesGeneral KenobiNoch keine Bewertungen
- Palestra System CrashDokument37 SeitenPalestra System CrashjpaullNoch keine Bewertungen
- Arvore IndustrialDokument30 SeitenArvore IndustrialDiego AzevedoNoch keine Bewertungen
- ContinentalContiTech Treinamento EspecificaçãoDokument18 SeitenContinentalContiTech Treinamento EspecificaçãoTravis DavisNoch keine Bewertungen
- Bte26 - 2017 - NOVO CCT Construção PDFDokument147 SeitenBte26 - 2017 - NOVO CCT Construção PDFfmtocnetNoch keine Bewertungen
- Call Mídias Sociais Uma Reflexão Sobre As Novas Ferramentas de Marketing Na HotelariaDokument15 SeitenCall Mídias Sociais Uma Reflexão Sobre As Novas Ferramentas de Marketing Na HotelariaSaulo PereiraNoch keine Bewertungen