Das könnte Ihnen auch gefallen
- Pickard Carretero WC 2019Dokument11 SeitenPickard Carretero WC 2019Mahmood AbuZaidNoch keine Bewertungen
- Discrete B-Splines and Subdivision Techniques in Computer-Aided Geometric Design and Computer Graphics PDFDokument26 SeitenDiscrete B-Splines and Subdivision Techniques in Computer-Aided Geometric Design and Computer Graphics PDF姜豪Noch keine Bewertungen
- Icra09 TaskSpaceTrajectoriesCubicSplineOptimizationDokument8 SeitenIcra09 TaskSpaceTrajectoriesCubicSplineOptimizationsigmateNoch keine Bewertungen
- A Computational Framework For Boundary Representation of Solid SweepsDokument12 SeitenA Computational Framework For Boundary Representation of Solid SweepsConkrang KajuNoch keine Bewertungen
- Kirkpatrick1992 Article PolygoNTriaNgulatioNINONLogLogDokument18 SeitenKirkpatrick1992 Article PolygoNTriaNgulatioNINONLogLogMario Galindo QueraltNoch keine Bewertungen
- An Improved Algorithm of Three B-Spline Curve Interpolation and SimulationDokument7 SeitenAn Improved Algorithm of Three B-Spline Curve Interpolation and SimulationLayla VuNoch keine Bewertungen
- Approximate Implicitization of Planar Parametric CDokument13 SeitenApproximate Implicitization of Planar Parametric CHusain KanchwalaNoch keine Bewertungen
- Fast, Precise Attening of Cubic Be Zier Path and Offset CurvesDokument11 SeitenFast, Precise Attening of Cubic Be Zier Path and Offset CurvesThea LandichoNoch keine Bewertungen
- Offset AlgorithmDokument15 SeitenOffset Algorithmsanthosh_6584Noch keine Bewertungen
- Interlocking Vaults by Voronoi Decomposition of 3D Space (2020)Dokument12 SeitenInterlocking Vaults by Voronoi Decomposition of 3D Space (2020)jlnederNoch keine Bewertungen
- Interpolation Algorithm Based On Central Angle DivisionDokument6 SeitenInterpolation Algorithm Based On Central Angle DivisionmtrietdinhbkNoch keine Bewertungen
- 24-Research On The Measuring System For Crankshaft Based On Laser PrincipleDokument7 Seiten24-Research On The Measuring System For Crankshaft Based On Laser PrincipleMahnooshNoch keine Bewertungen
- Sobol The Monte Carlo Method LML PDFDokument81 SeitenSobol The Monte Carlo Method LML PDFk464265Noch keine Bewertungen
- Introduction To Computer Graphics V1Dokument5 SeitenIntroduction To Computer Graphics V1solvedcareNoch keine Bewertungen
- Study of Logspline Density Estimation: (Revised 10, 1990)Dokument29 SeitenStudy of Logspline Density Estimation: (Revised 10, 1990)Farida KenzhebayevaNoch keine Bewertungen
- More Output Primitives and Geometric TransformationsDokument24 SeitenMore Output Primitives and Geometric TransformationsMuhammad SahilNoch keine Bewertungen
- Ada 181538Dokument265 SeitenAda 181538spbhavnaNoch keine Bewertungen
- Mathematical Association of America Is Collaborating With JSTOR To Digitize, Preserve and Extend Access To The American Mathematical MonthlyDokument10 SeitenMathematical Association of America Is Collaborating With JSTOR To Digitize, Preserve and Extend Access To The American Mathematical MonthlyAmino fileNoch keine Bewertungen
- QIM_3Dokument13 SeitenQIM_3souvik pramanikNoch keine Bewertungen
- ST Ca Ore Reser e Est Mation: I I L V IDokument9 SeitenST Ca Ore Reser e Est Mation: I I L V IShammy d'EvolutionNoch keine Bewertungen
- Numerical Gerotor DesignDokument18 SeitenNumerical Gerotor Designsardhan.rajender84Noch keine Bewertungen
- Basic Curves and Surface Modeling - CADDokument69 SeitenBasic Curves and Surface Modeling - CADDr. Ajay M PatelNoch keine Bewertungen
- Active Learning Guide 1st Edition Heuvelen Gentile Heuvelen 032186445X Solution ManualDokument47 SeitenActive Learning Guide 1st Edition Heuvelen Gentile Heuvelen 032186445X Solution Manualrobert100% (19)
- Sug 208Dokument12 SeitenSug 208Oyedeji GideonNoch keine Bewertungen
- Research On Cylindrical Indexing Cam's Unilateral Machining: Junhua Chen, Xiaowei Mu, Xuze Zhang and Chuhua JiangDokument9 SeitenResearch On Cylindrical Indexing Cam's Unilateral Machining: Junhua Chen, Xiaowei Mu, Xuze Zhang and Chuhua JiangAnonymous rvGgpvvqNoch keine Bewertungen
- DC66Dokument6 SeitenDC66funnyclups413Noch keine Bewertungen
- 2.1. Representation of Curves: Geometric ModelingDokument88 Seiten2.1. Representation of Curves: Geometric ModelingSrinith KumarNoch keine Bewertungen
- Geometric Modeling: Representation and Modeling of CurvesDokument88 SeitenGeometric Modeling: Representation and Modeling of CurvesSrinith KumarNoch keine Bewertungen
- Efficient Clipping of Arbitrary PolygonsDokument8 SeitenEfficient Clipping of Arbitrary Polygons梁耀灿Noch keine Bewertungen
- Stiffness Simulation of Joints of Large Manipulators Based On Cam Torsion Spring MechanismsDokument10 SeitenStiffness Simulation of Joints of Large Manipulators Based On Cam Torsion Spring MechanismsashnekNoch keine Bewertungen
- 1 s2.0 S0307904X18304487 MainDokument19 Seiten1 s2.0 S0307904X18304487 MainDesign NarayanawindpowerNoch keine Bewertungen
- 8th Sem ECE Papers (PC)Dokument71 Seiten8th Sem ECE Papers (PC)Pranjal GaurNoch keine Bewertungen
- Elemente Der Mathematik Volume 69 Issue 2 2014 (Doi 10.4171 - EM - 246) Nara, Chie - Continuous Flattening of Some PyramidsDokument12 SeitenElemente Der Mathematik Volume 69 Issue 2 2014 (Doi 10.4171 - EM - 246) Nara, Chie - Continuous Flattening of Some PyramidsEduardo CostaNoch keine Bewertungen
- CAD-01-UncutFreePocketing PDFDokument8 SeitenCAD-01-UncutFreePocketing PDFetet100Noch keine Bewertungen
- Helix ApproximationDokument32 SeitenHelix ApproximationvishesharadaNoch keine Bewertungen
- Sy Btech Computer Sem III Odd Jan - 2023Dokument75 SeitenSy Btech Computer Sem III Odd Jan - 2023Ajinkya GhugeNoch keine Bewertungen
- Unit 2 Bezier CurveDokument52 SeitenUnit 2 Bezier CurvedeepakmitrNoch keine Bewertungen
- General Instructions: Exam Is Closed Book. Total Time Is 3 Hrs. Calculator Is Allowed. Write To The Point Answers. Write NeatlyDokument3 SeitenGeneral Instructions: Exam Is Closed Book. Total Time Is 3 Hrs. Calculator Is Allowed. Write To The Point Answers. Write NeatlypranavjibhakateNoch keine Bewertungen
- Earthquake-Induced Permanent Deformations - 01-91Dokument16 SeitenEarthquake-Induced Permanent Deformations - 01-91Jose Joaquin Lozano RadaNoch keine Bewertungen
- Orbits in An Inverse-Square-Law Force Field: A Computer ProjectDokument8 SeitenOrbits in An Inverse-Square-Law Force Field: A Computer ProjectEpic WinNoch keine Bewertungen
- Midsem PyqDokument4 SeitenMidsem Pyqjuee chandrachudNoch keine Bewertungen
- assignment24010514Dokument4 Seitenassignment24010514Ahmer AtherNoch keine Bewertungen
- Visibility Graph AlgorithmDokument30 SeitenVisibility Graph AlgorithmAldo MuliaNoch keine Bewertungen
- Breadth Cam Profile Design With Oscillating Roller Follower: August 2010Dokument8 SeitenBreadth Cam Profile Design With Oscillating Roller Follower: August 2010Tri PujiyantoNoch keine Bewertungen
- Generation of Crowned Parabolic Novikov GearsDokument5 SeitenGeneration of Crowned Parabolic Novikov GearsfgsldfjglkjsdfNoch keine Bewertungen
- Ecs-301 Digital Logic Design 2011-12Dokument7 SeitenEcs-301 Digital Logic Design 2011-12Satyedra MauryaNoch keine Bewertungen
- Course WorkDokument20 SeitenCourse Work6942867538Noch keine Bewertungen
- I, + Vi' Vi, Aki ': Bik Bik Vi Vk. Vi Vi VK, VK Vi VB Bik' VK VB D G G B, DDokument5 SeitenI, + Vi' Vi, Aki ': Bik Bik Vi Vk. Vi Vi VK, VK Vi VB Bik' VK VB D G G B, DDhittaNoch keine Bewertungen
- Space-Filling Curves An Introduction: Department of Informatics Technical University MunichDokument15 SeitenSpace-Filling Curves An Introduction: Department of Informatics Technical University MunichRizo MwitaNoch keine Bewertungen
- Online Techniques For Dealing With Concept Drift in Process MiningDokument12 SeitenOnline Techniques For Dealing With Concept Drift in Process MiningKevin MondragonNoch keine Bewertungen
- EGR 5110 - Notes - Topic 0.1 - Overview of Numerical Analysis and Data Storage - 1 Slide Per PageDokument10 SeitenEGR 5110 - Notes - Topic 0.1 - Overview of Numerical Analysis and Data Storage - 1 Slide Per PageG DriveNoch keine Bewertungen
- Coe Sem 5 End Sem 2008Dokument10 SeitenCoe Sem 5 End Sem 2008ashwaniNoch keine Bewertungen
- Geometric Algorithms: Primitive Operations Convex Hull Closest Pair Voronoi DiagramDokument62 SeitenGeometric Algorithms: Primitive Operations Convex Hull Closest Pair Voronoi DiagramAnnie WalkerNoch keine Bewertungen
- Topological Sorting: Directed Acyclic GraphDokument22 SeitenTopological Sorting: Directed Acyclic Graphmark edwardsNoch keine Bewertungen
- Design and Analysis of The Properties of The Delta Inverse RobotDokument7 SeitenDesign and Analysis of The Properties of The Delta Inverse RobotmohsenNoch keine Bewertungen
- Class Notes, Trajectory Planning, COMS4733: 1 TrajectoriesDokument9 SeitenClass Notes, Trajectory Planning, COMS4733: 1 TrajectoriesVashish RamrechaNoch keine Bewertungen
- Caed ProblemsDokument20 SeitenCaed ProblemsPardeepNoch keine Bewertungen
- Watch and Clock Escapements A Complete Study in Theory and Practice of the Lever, Cylinder and Chronometer Escapements, Together with a Brief Account of the Origin and Evolution of the Escapement in HorologyVon EverandWatch and Clock Escapements A Complete Study in Theory and Practice of the Lever, Cylinder and Chronometer Escapements, Together with a Brief Account of the Origin and Evolution of the Escapement in HorologyNoch keine Bewertungen
- cs231n 2017 Lecture5Dokument78 Seitencs231n 2017 Lecture5fatalist3Noch keine Bewertungen
- Talca: Lowest Common Ancestor: Codechef July Lunchtime 2014 ProblemsDokument2 SeitenTalca: Lowest Common Ancestor: Codechef July Lunchtime 2014 ProblemsRahul MehtaNoch keine Bewertungen
- Software Vulnerability Prediction Using Text Analysis TechniquesDokument3 SeitenSoftware Vulnerability Prediction Using Text Analysis TechniquesRahul MehtaNoch keine Bewertungen
- Mid Sem Exam Schedule - For Rest StudentsDokument1 SeiteMid Sem Exam Schedule - For Rest Studentsq2csNoch keine Bewertungen
- Beliefs Selffulfillingprophecy 21943Dokument27 SeitenBeliefs Selffulfillingprophecy 21943Rahul MehtaNoch keine Bewertungen
- Introduction to PCA and FA: Dimension Reduction ToolsDokument29 SeitenIntroduction to PCA and FA: Dimension Reduction ToolsPushpaRasnayakeNoch keine Bewertungen
- 8.relavance Feedback - IIDokument52 Seiten8.relavance Feedback - IIRahul MehtaNoch keine Bewertungen
- Assign 5Dokument5 SeitenAssign 5Rahul MehtaNoch keine Bewertungen
- Summary Trading in The ZoneDokument29 SeitenSummary Trading in The Zoneleo_kp510496% (28)
- CF MidsemDokument1 SeiteCF MidsemRahul MehtaNoch keine Bewertungen
- Operating Systems: CSE 231 Instructor: Sambuddho ChakravartyDokument40 SeitenOperating Systems: CSE 231 Instructor: Sambuddho ChakravartyRahul MehtaNoch keine Bewertungen
- Understanding The Changing Roles of Scientific Publications Via Citation - EmbeddingsDokument7 SeitenUnderstanding The Changing Roles of Scientific Publications Via Citation - EmbeddingsRahul MehtaNoch keine Bewertungen
- Prob-Q1 5Dokument1 SeiteProb-Q1 5Rahul MehtaNoch keine Bewertungen
- Introduction To Algo TradingDokument50 SeitenIntroduction To Algo TradingMark Luther100% (4)
- Operating Systems: CSE 231 Instructor: Sambuddho ChakravartyDokument40 SeitenOperating Systems: CSE 231 Instructor: Sambuddho ChakravartyRahul MehtaNoch keine Bewertungen
- Algorithms List in AIDokument59 SeitenAlgorithms List in AIkucingmucingNoch keine Bewertungen
- Lab3-Familiarizingwithlinuxandunixcommands 13071 PDFDokument17 SeitenLab3-Familiarizingwithlinuxandunixcommands 13071 PDFRahul MehtaNoch keine Bewertungen
- FeRoSa FacetatedrecoDokument12 SeitenFeRoSa FacetatedrecoRahul MehtaNoch keine Bewertungen
- Auvsi Suas Competition Interoperability SystemDokument54 SeitenAuvsi Suas Competition Interoperability SystemRahul MehtaNoch keine Bewertungen
- Installation Instruction XALM IndoorDokument37 SeitenInstallation Instruction XALM IndoorVanek505Noch keine Bewertungen
- Practical Research 2: Self-Learning PackageDokument3 SeitenPractical Research 2: Self-Learning PackagePrinces BaccayNoch keine Bewertungen
- ASTM D256-10 - Standard Test Methods For Determining The Izod Pendulum Impact Resistance of PlasticsDokument20 SeitenASTM D256-10 - Standard Test Methods For Determining The Izod Pendulum Impact Resistance of PlasticsEng. Emílio DechenNoch keine Bewertungen
- Florence Walking Tour MapDokument14 SeitenFlorence Walking Tour MapNguyễn Tấn QuangNoch keine Bewertungen
- Health Education and Health PromotionDokument4 SeitenHealth Education and Health PromotionRamela Mae SalvatierraNoch keine Bewertungen
- IntroductionDokument34 SeitenIntroductionmarranNoch keine Bewertungen
- Newcomers Guide To The Canadian Job MarketDokument47 SeitenNewcomers Guide To The Canadian Job MarketSS NairNoch keine Bewertungen
- Overview of Quality Gurus Deming, Juran, Crosby, Imai, Feigenbaum & Their ContributionsDokument11 SeitenOverview of Quality Gurus Deming, Juran, Crosby, Imai, Feigenbaum & Their ContributionsVenkatesh RadhakrishnanNoch keine Bewertungen
- Master of Commerce: 1 YearDokument8 SeitenMaster of Commerce: 1 YearAston Rahul PintoNoch keine Bewertungen
- Major Bank Performance IndicatorsDokument35 SeitenMajor Bank Performance IndicatorsAshish MehraNoch keine Bewertungen
- SYNOPSIS - Impact of GST On Small Traders!Dokument21 SeitenSYNOPSIS - Impact of GST On Small Traders!Laxmi PriyaNoch keine Bewertungen
- ME6404 Thermal EngineeringDokument18 SeitenME6404 Thermal EngineeringAnonymous mRBbdopMKfNoch keine Bewertungen
- Module 2Dokument42 SeitenModule 2DhananjayaNoch keine Bewertungen
- 10 Slides For A Perfect Startup Pitch DeckDokument6 Seiten10 Slides For A Perfect Startup Pitch DeckZakky AzhariNoch keine Bewertungen
- Course: Citizenship Education and Community Engagement: (8604) Assignment # 1Dokument16 SeitenCourse: Citizenship Education and Community Engagement: (8604) Assignment # 1Amyna Rafy AwanNoch keine Bewertungen
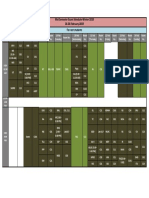
- Time Table For Winter 2023 Theory ExaminationDokument1 SeiteTime Table For Winter 2023 Theory ExaminationSushant kakadeNoch keine Bewertungen
- Failure Analysis Case Study PDFDokument2 SeitenFailure Analysis Case Study PDFScott50% (2)
- Unit 1 Writing. Exercise 1Dokument316 SeitenUnit 1 Writing. Exercise 1Hoài Thương NguyễnNoch keine Bewertungen
- Term Sheet: Original Borrowers) Material Subsidiaries/jurisdiction) )Dokument16 SeitenTerm Sheet: Original Borrowers) Material Subsidiaries/jurisdiction) )spachecofdz0% (1)
- Mechanics of Deformable BodiesDokument21 SeitenMechanics of Deformable BodiesVarun. hrNoch keine Bewertungen
- BPO UNIT - 5 Types of Securities Mode of Creating Charge Bank Guarantees Basel NormsDokument61 SeitenBPO UNIT - 5 Types of Securities Mode of Creating Charge Bank Guarantees Basel NormsDishank JohriNoch keine Bewertungen
- VL2019201000534 DaDokument2 SeitenVL2019201000534 DaEnjoy LifeNoch keine Bewertungen
- IELTS Vocabulary ExpectationDokument3 SeitenIELTS Vocabulary ExpectationPham Ba DatNoch keine Bewertungen
- C Exam13Dokument4 SeitenC Exam13gauravsoni1991Noch keine Bewertungen
- Expressive Matter Vendor FaqDokument14 SeitenExpressive Matter Vendor FaqRobert LedermanNoch keine Bewertungen
- Socially Responsible CompaniesDokument2 SeitenSocially Responsible CompaniesItzman SánchezNoch keine Bewertungen
- Land Measurement in PunjabDokument3 SeitenLand Measurement in PunjabJunaid Iqbal33% (3)
- SEO Design ExamplesDokument10 SeitenSEO Design ExamplesAnonymous YDwBCtsNoch keine Bewertungen
- Ryerson EthicsDokument20 SeitenRyerson EthicssinghbabaNoch keine Bewertungen
- Class Ix - Break-Up SyllabusDokument3 SeitenClass Ix - Break-Up Syllabus9C Aarib IqbalNoch keine Bewertungen