Das könnte Ihnen auch gefallen
- Volvo 480Dokument34 SeitenVolvo 480Garcia Jihoo Rene82% (17)
- ProcedimientoDokument15 SeitenProcedimientoAngel Huacan NinaNoch keine Bewertungen
- Técnicas de MediciónDokument60 SeitenTécnicas de MediciónGarcia Jihoo Rene100% (3)
- Técnicas de medición y formato de inspección del tren de rodamientoDokument17 SeitenTécnicas de medición y formato de inspección del tren de rodamientoGarcia Jihoo Rene100% (1)
- + Curso de Formacion para Elevador Ehr de BoschDokument64 Seiten+ Curso de Formacion para Elevador Ehr de BoschDavid Moreno100% (3)
- Informe Tecnico-Programa Tec - Grupo 401Dokument6 SeitenInforme Tecnico-Programa Tec - Grupo 401Garcia Jihoo ReneNoch keine Bewertungen
- Potencia eléctrica: activa, reactiva y aparenteDokument33 SeitenPotencia eléctrica: activa, reactiva y aparenteangelita550% (2)
- Sistema MonofásicoDokument4 SeitenSistema MonofásicoGarcia Jihoo ReneNoch keine Bewertungen
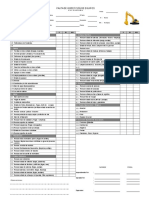
- Check List Excavadora DEFDokument2 SeitenCheck List Excavadora DEFGarcia Jihoo Rene100% (2)
- CONCLUSIÓNDokument6 SeitenCONCLUSIÓNGarcia Jihoo ReneNoch keine Bewertungen
- Tratamiento TérmicoDokument9 SeitenTratamiento TérmicoMarilin Mayuvi Alferez CondoriNoch keine Bewertungen
- Sistemas Monofasicos y TrifasicosDokument6 SeitenSistemas Monofasicos y TrifasicosGarcia Jihoo ReneNoch keine Bewertungen
- Informe Formato CsaDokument4 SeitenInforme Formato CsaGarcia Jihoo ReneNoch keine Bewertungen
- Amache Calizaya WalterDokument6 SeitenAmache Calizaya WalterGarcia Jihoo ReneNoch keine Bewertungen
- Motor Cummins QSK 19.Dokument3 SeitenMotor Cummins QSK 19.Garcia Jihoo ReneNoch keine Bewertungen
- Tratamiento Termico de MetalesDokument26 SeitenTratamiento Termico de MetalesGarcia Jihoo Rene100% (1)
- Sistemas Monofasicos y TrifasicosDokument18 SeitenSistemas Monofasicos y TrifasicosGarcia Jihoo ReneNoch keine Bewertungen
- Elementos Principales Del Monoblock 1Dokument4 SeitenElementos Principales Del Monoblock 1Garcia Jihoo ReneNoch keine Bewertungen
- Sistema MonofásicoDokument4 SeitenSistema MonofásicoGarcia Jihoo ReneNoch keine Bewertungen
- La IntegridadDokument8 SeitenLa IntegridadGarcia Jihoo ReneNoch keine Bewertungen
- Tratamiento TérmicoDokument21 SeitenTratamiento TérmicoGarcia Jihoo ReneNoch keine Bewertungen
- Pareto PlataformaDokument18 SeitenPareto PlataformaAlfredoNoch keine Bewertungen
- Inpeccion de MotorDokument1 SeiteInpeccion de MotorGarcia Jihoo ReneNoch keine Bewertungen
- Wheeled Excavators Wx188 Wx218 Brochure EsDokument24 SeitenWheeled Excavators Wx188 Wx218 Brochure EsGarcia Jihoo ReneNoch keine Bewertungen
- Wheeled Excavators Wx188 Wx218 Brochure EsDokument9 SeitenWheeled Excavators Wx188 Wx218 Brochure EsGarcia Jihoo ReneNoch keine Bewertungen
- Inspeccion de Carrileria Jorge Enrique Vasquez RiosDokument1 SeiteInspeccion de Carrileria Jorge Enrique Vasquez RiosGarcia Jihoo ReneNoch keine Bewertungen
- Codigo de Colores - NTP 900 058 2005Dokument3 SeitenCodigo de Colores - NTP 900 058 2005R. S.Noch keine Bewertungen
- Wheeled Excavators Wx188 Wx218 Brochure EsDokument24 SeitenWheeled Excavators Wx188 Wx218 Brochure EsGarcia Jihoo ReneNoch keine Bewertungen
- Wiliam HcatDokument4 SeitenWiliam HcatGarcia Jihoo ReneNoch keine Bewertungen
- Codigo de Colores para Los Dispositivos de Almacenamiento de ResiduosDokument19 SeitenCodigo de Colores para Los Dispositivos de Almacenamiento de Residuos197208100% (4)
- Pareto PlataformaDokument18 SeitenPareto PlataformaAlfredoNoch keine Bewertungen
- Sos 01Dokument1 SeiteSos 01Garcia Jihoo ReneNoch keine Bewertungen
- Sos 01Dokument1 SeiteSos 01Garcia Jihoo ReneNoch keine Bewertungen
- Resumen 2BDokument27 SeitenResumen 2BLuis Enrique GutiérrezNoch keine Bewertungen
- Laboratorio #3: Capacitores y CapacitanciaDokument4 SeitenLaboratorio #3: Capacitores y Capacitanciafisikelectrica6974100% (7)
- Conceptos Básicos de Electrotecnia - Hernán Tacca (2020) - Onceptos Básicos de ElectrotecniaDokument236 SeitenConceptos Básicos de Electrotecnia - Hernán Tacca (2020) - Onceptos Básicos de ElectrotecniasbuesoNoch keine Bewertungen
- 2 Magnetismo, Alternadores, MagnitudesDokument22 Seiten2 Magnetismo, Alternadores, MagnitudesEdgard OrtizNoch keine Bewertungen
- Guión Práctica 5 - El Transistor - Encendido de LED Con LDR - IEB - OdtDokument4 SeitenGuión Práctica 5 - El Transistor - Encendido de LED Con LDR - IEB - Odtelnacho hjNoch keine Bewertungen
- Norma Upr - Anexo I de Acuerdo 367-E-2017Dokument13 SeitenNorma Upr - Anexo I de Acuerdo 367-E-2017Hector GuerraNoch keine Bewertungen
- 3.1 Leccion Aprendida Falla Arco ElectricoDokument1 Seite3.1 Leccion Aprendida Falla Arco ElectricolcastroqNoch keine Bewertungen
- Como Usar El Tester o MultímetroDokument4 SeitenComo Usar El Tester o MultímetrodiegoyoliNoch keine Bewertungen
- Control de Fase Con TriacDokument4 SeitenControl de Fase Con TriacGustavo Leyva EspezúaNoch keine Bewertungen
- Copia de Especialización SPAT 1Dokument56 SeitenCopia de Especialización SPAT 1Yony Loayza sotoNoch keine Bewertungen
- Tarea Ii de Fisica IiiDokument7 SeitenTarea Ii de Fisica IiiManuel CuetoNoch keine Bewertungen
- Discusión 11.Dokument7 SeitenDiscusión 11.Lili Flores100% (1)
- Informe Analisis GraficoDokument18 SeitenInforme Analisis GraficoalejandraNoch keine Bewertungen
- Instalación y funcionamiento del economizador a microprocesador MCSDokument24 SeitenInstalación y funcionamiento del economizador a microprocesador MCSJulio Enrique Oliver CuelloNoch keine Bewertungen
- Cálculos líneas BTDokument16 SeitenCálculos líneas BTFersh ValderramashNoch keine Bewertungen
- Clase I - Instalaciones Electricas DomiciliariasDokument38 SeitenClase I - Instalaciones Electricas DomiciliariasDayanne Ramirez FarfánNoch keine Bewertungen
- Capitulo Ii - FallasDokument141 SeitenCapitulo Ii - FallasWily CuscoNoch keine Bewertungen
- Prueba de DiodosDokument1 SeitePrueba de DiodosaderlochNoch keine Bewertungen
- Líneas de Transmisión PDFDokument69 SeitenLíneas de Transmisión PDFFernando FloresNoch keine Bewertungen
- TEMAS SELECTOS DE FiSICADokument14 SeitenTEMAS SELECTOS DE FiSICANicole MartínezNoch keine Bewertungen
- Configuración y funcionamiento del partidor suave Danfoss MCD 3000Dokument11 SeitenConfiguración y funcionamiento del partidor suave Danfoss MCD 3000Kriss OvandoNoch keine Bewertungen
- Efecto Térmico de La ElectricidadDokument14 SeitenEfecto Térmico de La ElectricidadFernando BonillaNoch keine Bewertungen
- Multímetro, Gaussímetro, Generador de Ondas, Plantilla de Pruebas y OsciloscopioDokument5 SeitenMultímetro, Gaussímetro, Generador de Ondas, Plantilla de Pruebas y OsciloscopioAlejandroCortezNoch keine Bewertungen
- Tarifas Luz Del SurDokument1 SeiteTarifas Luz Del SurderfNoch keine Bewertungen
- Unidad 9 FOL 2022Dokument32 SeitenUnidad 9 FOL 2022Bea Rod TolNoch keine Bewertungen
- Elección de La Organización Descripción de La Matriz Del IPER Mapa de RiesgosDokument8 SeitenElección de La Organización Descripción de La Matriz Del IPER Mapa de RiesgosdennysNoch keine Bewertungen
- Universidad Tecnologica Del Peru Practica 2Dokument5 SeitenUniversidad Tecnologica Del Peru Practica 2Marcos Valverde AvendañoNoch keine Bewertungen