Das könnte Ihnen auch gefallen
- 4 Pin LCDDokument13 Seiten4 Pin LCDVenkata Konda Reddy Mulle100% (1)
- SSC-32 Ver 2.0: Manual Written For Firmware Version SSC32-1.06XE Range Is 0.50mS To 2.50mSDokument15 SeitenSSC-32 Ver 2.0: Manual Written For Firmware Version SSC32-1.06XE Range Is 0.50mS To 2.50mSMardan Sabily Hasibuan100% (2)
- DC Motor Control Using CDokument6 SeitenDC Motor Control Using Cankitguptaims100% (2)
- Lab2 MotorControl 08Dokument18 SeitenLab2 MotorControl 08ĐạiDương100% (1)
- Development Kit For E-Paper Display: Dalian Good Display Co., LTDDokument13 SeitenDevelopment Kit For E-Paper Display: Dalian Good Display Co., LTDjhonatan cock100% (1)
- USART UART RS232 USB SPI I2C TTL Etc What Are All of These and How Do They Relate To Each OtherDokument4 SeitenUSART UART RS232 USB SPI I2C TTL Etc What Are All of These and How Do They Relate To Each OtherMohamed Ashraf100% (1)
- 1-Basics of MicroprocessorDokument9 Seiten1-Basics of Microprocessorafzal_a100% (1)
- Circuit DiagramDokument10 SeitenCircuit DiagramM Rameez Ur Rehman100% (1)
- 10.1 I2C Basics - EngscopeDokument8 Seiten10.1 I2C Basics - Engscopeshadow_smdk100% (1)
- Unit - Iii MPMC-1Dokument79 SeitenUnit - Iii MPMC-1gunda manasa100% (1)
- GD7965 Spec0fdeDokument76 SeitenGD7965 Spec0fdejhonatan cock100% (1)
- The Ultrasonic SensorDokument14 SeitenThe Ultrasonic SensorAdalberto Sharpley100% (1)
- Simple Icom CI-V InterfaceDokument2 SeitenSimple Icom CI-V InterfaceMike100% (1)
- SSC-32 Ver 2.0: Manual Written For Firmware Version SSC32-1.06XE Range Is 0.50mS To 2.50mSDokument15 SeitenSSC-32 Ver 2.0: Manual Written For Firmware Version SSC32-1.06XE Range Is 0.50mS To 2.50mSSergio Juan100% (1)
- 1.3inch OLED UserManualDokument7 Seiten1.3inch OLED UserManualReV100% (1)
- PIC Programming Module USB and Traffic Light System ControllerDokument26 SeitenPIC Programming Module USB and Traffic Light System ControllerJosh, LRT100% (1)
- Serial CommunicationsDokument23 SeitenSerial CommunicationsPhuoc Trung Tran100% (1)
- AS1115 Datasheet v1 06 LED DriverDokument24 SeitenAS1115 Datasheet v1 06 LED Driverfarianek100% (1)
- LED ChaserDokument7 SeitenLED ChaserMegan Skinner100% (1)
- DC Motor Control Using C++Dokument8 SeitenDC Motor Control Using C++Atto100% (2)
- LCD 8051 Ver1Dokument6 SeitenLCD 8051 Ver1Nur Razanah Mohd Yasin100% (1)
- PosterDokument2 SeitenPostervic_silva100% (1)
- Praktek 6 AVR Display Data Pada LCD-1Dokument15 SeitenPraktek 6 AVR Display Data Pada LCD-1YeheskielRantePayung100% (1)
- Choosing The Correct DigipotDokument4 SeitenChoosing The Correct Digipottubeman1814100% (1)
- Pic 18 1Dokument2 SeitenPic 18 1alpesh100% (1)
- Micro Smart ManualDokument455 SeitenMicro Smart ManualJuan Carlos100% (1)
- 256/128 Kbit Serial I C Bus EEPROM Without Chip Enable LinesDokument16 Seiten256/128 Kbit Serial I C Bus EEPROM Without Chip Enable LinesRoni Socompi100% (1)
- Exploring PIC 24F Series Microcontroller PDFDokument13 SeitenExploring PIC 24F Series Microcontroller PDFErandi Brito100% (1)
- Difference Between PIC and AVRDokument8 SeitenDifference Between PIC and AVRVinsen Teubun Letsoin100% (1)
- Design and Implementation of Uart Serial Communication ProtocolDokument35 SeitenDesign and Implementation of Uart Serial Communication Protocolpinky2810100% (2)
- Junebug PiCKIT2Dokument12 SeitenJunebug PiCKIT2wos22100% (1)
- 16Fxxx With ICSPDokument3 Seiten16Fxxx With ICSPAlonso Corado100% (2)
- Gsm2 Click Manual V101a (Mikroe)Dokument2 SeitenGsm2 Click Manual V101a (Mikroe)Agustin Charbonnier100% (1)
- Newbie's Guide To AVR TimersDokument23 SeitenNewbie's Guide To AVR TimersNitish Kumar100% (1)
- 4 Bit LCDDokument4 Seiten4 Bit LCDSuresh Kuruma100% (1)
- Wiegand To Rs232 ConverterDokument4 SeitenWiegand To Rs232 ConverterTriều Dương100% (1)
- ManualDokument155 SeitenManualJulio Infantes100% (1)
- Embedded System: From Wikipedia, The Free EncyclopediaDokument12 SeitenEmbedded System: From Wikipedia, The Free EncyclopediaAndrei Ursac100% (1)
- Pic Assem 2004Dokument34 SeitenPic Assem 2004LuisHdz100% (2)
- Pic18 Interrupt 2Dokument19 SeitenPic18 Interrupt 2adamwaiz100% (3)
- How USB WorksDokument7 SeitenHow USB Works123.shalini100% (1)
- 20090525021407ury0q9 (HAC-UAN480 Data RF Module)Dokument17 Seiten20090525021407ury0q9 (HAC-UAN480 Data RF Module)Agung Duemilanove100% (3)
- PHOENIX - RS232 - 485 To TCPDokument14 SeitenPHOENIX - RS232 - 485 To TCPJorge_Andril_5370100% (1)
- TC8129CKWDokument17 SeitenTC8129CKWVukica Ivic100% (1)
- Embedded SystemsDokument27 SeitenEmbedded Systemsnavneet100% (1)
- Interfacing A LCD Display With 8051Dokument7 SeitenInterfacing A LCD Display With 8051bhaswati100% (1)
- MICROCHIPDokument20 SeitenMICROCHIPHector David100% (1)
- AN83 Maxim Fundamentals of RS-232 Serial CommunicationsDokument9 SeitenAN83 Maxim Fundamentals of RS-232 Serial CommunicationsCarlos Roman Zarza100% (1)
- Usb RS232Dokument7 SeitenUsb RS232Juan Luis Carr100% (1)
- LPC P2148Dokument19 SeitenLPC P2148Sharath Babu100% (1)
- Arduino Uno Schematic Annotated1Dokument1 SeiteArduino Uno Schematic Annotated1matthewwu2003100% (1)
- List IC CampurDokument17 SeitenList IC CampurFudin Safudin100% (2)
- 1 Hardware and Its Working: ArduinoDokument10 Seiten1 Hardware and Its Working: ArduinoRakesh ChaurasiaNoch keine Bewertungen
- CNC Instructables PDFDokument13 SeitenCNC Instructables PDFNadim AhmedNoch keine Bewertungen
- Essentials of Motors and Motor Driver: Interfacing Proximity Sensor With MotorDokument28 SeitenEssentials of Motors and Motor Driver: Interfacing Proximity Sensor With MotorAli KhormiNoch keine Bewertungen
- Final Report On Line Follower RobotDokument44 SeitenFinal Report On Line Follower RobotAjay Verma50% (4)
- Group 12 ReportDokument18 SeitenGroup 12 ReportPoonam GuptaNoch keine Bewertungen
- LED Solar ProjectDokument102 SeitenLED Solar ProjectBrandy RomanNoch keine Bewertungen
- Hardware InstallationDokument29 SeitenHardware InstallationHarjass SinghNoch keine Bewertungen
- Cnc4Pc: ManualDokument5 SeitenCnc4Pc: ManualClaudio AlmiciNoch keine Bewertungen
- PCB With Aluminum Foil Printing - Electronics Projects CircuitsDokument7 SeitenPCB With Aluminum Foil Printing - Electronics Projects CircuitsLiraJuniorNoch keine Bewertungen
- Aiwa CT-FR706 PDFDokument10 SeitenAiwa CT-FR706 PDFLiraJuniorNoch keine Bewertungen
- Larry Teal WorkbookDokument80 SeitenLarry Teal WorkbookEvanNoch keine Bewertungen
- Partituras Del Renacimiento Y Barroco PDFDokument52 SeitenPartituras Del Renacimiento Y Barroco PDFDaniel Dos Santos75% (4)
- Enterprise Hub DatasheetDokument4 SeitenEnterprise Hub DatasheetSkooterNoch keine Bewertungen
- TRTDokument3 SeitenTRTSubrato GhoshalNoch keine Bewertungen
- CV-Agus Nugraha (11.01.2021)Dokument11 SeitenCV-Agus Nugraha (11.01.2021)Agus NugrahaNoch keine Bewertungen
- FTTH Technical Process Flow, Troubleshooting & FAQs-V1-Ukm v3Dokument17 SeitenFTTH Technical Process Flow, Troubleshooting & FAQs-V1-Ukm v3Rabi'atul AdawiyahNoch keine Bewertungen
- 5G Mobile Technology: BY M.Hemalatha HT - NO: 106T1A0453Dokument26 Seiten5G Mobile Technology: BY M.Hemalatha HT - NO: 106T1A0453munnaNoch keine Bewertungen
- CWCTDokument5 SeitenCWCTtroyel99Noch keine Bewertungen
- Property Management SystemDokument48 SeitenProperty Management SystemAkshay P50% (2)
- Zip Password CrackerDokument31 SeitenZip Password CrackerMoTech100% (1)
- Sihao Huang Resume 1Dokument2 SeitenSihao Huang Resume 1api-528311148Noch keine Bewertungen
- Hl-Dv7W HL-DV5: One-Piece Digital Camera/Recorder With DVCAM FormatDokument8 SeitenHl-Dv7W HL-DV5: One-Piece Digital Camera/Recorder With DVCAM FormatMuhammad Akhfash RaffayNoch keine Bewertungen
- Airport Qualification and Familiarization ChartsDokument3 SeitenAirport Qualification and Familiarization Chartsjackygdp645Noch keine Bewertungen
- Charles Eisenstein - Synchronicity Myth, and The New World Order Part 1Dokument5 SeitenCharles Eisenstein - Synchronicity Myth, and The New World Order Part 1aardsnailNoch keine Bewertungen
- 模型剪枝在2d3d卷积网络中的研究与应用-悉尼大学在读博士生郭晋阳 智东西公开课Dokument70 Seiten模型剪枝在2d3d卷积网络中的研究与应用-悉尼大学在读博士生郭晋阳 智东西公开课jiahao liNoch keine Bewertungen
- Eaton 9PX Brochure (SEA)Dokument4 SeitenEaton 9PX Brochure (SEA)Anonymous 6N7hofVNoch keine Bewertungen
- To Study On Marketing Strategies of SamsungDokument64 SeitenTo Study On Marketing Strategies of SamsungVaibhav Shah MangalamjobsNoch keine Bewertungen
- Manual Teclado Ligthsys - RiscoDokument32 SeitenManual Teclado Ligthsys - RiscoLuis Oliver Neciosup VasquezNoch keine Bewertungen
- Exercise Book (FI109) - (Joint Venture) v1.1Dokument9 SeitenExercise Book (FI109) - (Joint Venture) v1.1Shyam JaganathNoch keine Bewertungen
- Positioning The EventDokument16 SeitenPositioning The EventStephanie Aira LumberaNoch keine Bewertungen
- Company Report FS Work Draft !!!Dokument26 SeitenCompany Report FS Work Draft !!!tsehay seidNoch keine Bewertungen
- SKMW30 & DKMW30: 30W 1"x1" Package DC-DC Regulated ConverterDokument5 SeitenSKMW30 & DKMW30: 30W 1"x1" Package DC-DC Regulated ConverterEng SamNoch keine Bewertungen
- 002 Gaming PC Office PC Server PC AI Data Mining Research PC SystemsDokument4 Seiten002 Gaming PC Office PC Server PC AI Data Mining Research PC SystemsBizgram AsiaNoch keine Bewertungen
- Ekta Prajapati Resume PDFDokument2 SeitenEkta Prajapati Resume PDFghanapathy ramNoch keine Bewertungen
- Geoscience Data Management ReportDokument18 SeitenGeoscience Data Management ReportSantiagoCuartasNoch keine Bewertungen
- 2 PagesDokument3 Seiten2 PagesJohn Manuel BautistaNoch keine Bewertungen
- Unit - I: Pragati Engineering College, Surampalem (Autonomous) Computer Science and Engineering B.Tech Ii Year I SemesterDokument16 SeitenUnit - I: Pragati Engineering College, Surampalem (Autonomous) Computer Science and Engineering B.Tech Ii Year I Semesterveera jeejneshNoch keine Bewertungen
- Tutorial On Earned Value Management Systems: Dennis J. FraileyDokument14 SeitenTutorial On Earned Value Management Systems: Dennis J. FraileySheetal IyerNoch keine Bewertungen
- HP Laptop 15-Bs0xxDokument124 SeitenHP Laptop 15-Bs0xxmanoj14febNoch keine Bewertungen
- Gambia ICT - Final - WebDokument77 SeitenGambia ICT - Final - Webabey.mulugetaNoch keine Bewertungen
- Panduan TimeTrexDokument53 SeitenPanduan TimeTrexAdi Wibowo Yudo Pranoto100% (1)
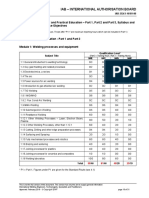
- IWE SyllabusDokument4 SeitenIWE Syllabusmdasifkhan2013Noch keine Bewertungen
- Hero Found: The Greatest POW Escape of the Vietnam WarVon EverandHero Found: The Greatest POW Escape of the Vietnam WarBewertung: 4 von 5 Sternen4/5 (19)
- Dirt to Soil: One Family’s Journey into Regenerative AgricultureVon EverandDirt to Soil: One Family’s Journey into Regenerative AgricultureBewertung: 5 von 5 Sternen5/5 (125)
- The End of Craving: Recovering the Lost Wisdom of Eating WellVon EverandThe End of Craving: Recovering the Lost Wisdom of Eating WellBewertung: 4.5 von 5 Sternen4.5/5 (82)
- Sully: The Untold Story Behind the Miracle on the HudsonVon EverandSully: The Untold Story Behind the Miracle on the HudsonBewertung: 4 von 5 Sternen4/5 (103)
- The Fabric of Civilization: How Textiles Made the WorldVon EverandThe Fabric of Civilization: How Textiles Made the WorldBewertung: 4.5 von 5 Sternen4.5/5 (58)
- The Beekeeper's Lament: How One Man and Half a Billion Honey Bees Help Feed AmericaVon EverandThe Beekeeper's Lament: How One Man and Half a Billion Honey Bees Help Feed AmericaNoch keine Bewertungen
- The Future of Geography: How the Competition in Space Will Change Our WorldVon EverandThe Future of Geography: How the Competition in Space Will Change Our WorldBewertung: 4 von 5 Sternen4/5 (6)
- Mini Farming: Self-Sufficiency on 1/4 AcreVon EverandMini Farming: Self-Sufficiency on 1/4 AcreBewertung: 4 von 5 Sternen4/5 (76)
- Permaculture for the Rest of Us: Abundant Living on Less than an AcreVon EverandPermaculture for the Rest of Us: Abundant Living on Less than an AcreBewertung: 4.5 von 5 Sternen4.5/5 (33)
- When the Heavens Went on Sale: The Misfits and Geniuses Racing to Put Space Within ReachVon EverandWhen the Heavens Went on Sale: The Misfits and Geniuses Racing to Put Space Within ReachBewertung: 3.5 von 5 Sternen3.5/5 (6)
- Four Battlegrounds: Power in the Age of Artificial IntelligenceVon EverandFour Battlegrounds: Power in the Age of Artificial IntelligenceBewertung: 5 von 5 Sternen5/5 (5)
- System Error: Where Big Tech Went Wrong and How We Can RebootVon EverandSystem Error: Where Big Tech Went Wrong and How We Can RebootNoch keine Bewertungen
- Fire on the Horizon: The Untold Story of the Gulf Oil DisasterVon EverandFire on the Horizon: The Untold Story of the Gulf Oil DisasterNoch keine Bewertungen
- The Intel Trinity: How Robert Noyce, Gordon Moore, and Andy Grove Built the World's Most Important CompanyVon EverandThe Intel Trinity: How Robert Noyce, Gordon Moore, and Andy Grove Built the World's Most Important CompanyNoch keine Bewertungen
- Pale Blue Dot: A Vision of the Human Future in SpaceVon EverandPale Blue Dot: A Vision of the Human Future in SpaceBewertung: 4.5 von 5 Sternen4.5/5 (588)
- The Technology Trap: Capital, Labor, and Power in the Age of AutomationVon EverandThe Technology Trap: Capital, Labor, and Power in the Age of AutomationBewertung: 4.5 von 5 Sternen4.5/5 (46)
- Highest Duty: My Search for What Really MattersVon EverandHighest Duty: My Search for What Really MattersNoch keine Bewertungen
- Faster: How a Jewish Driver, an American Heiress, and a Legendary Car Beat Hitler's BestVon EverandFaster: How a Jewish Driver, an American Heiress, and a Legendary Car Beat Hitler's BestBewertung: 4 von 5 Sternen4/5 (28)
- Transformed: Moving to the Product Operating ModelVon EverandTransformed: Moving to the Product Operating ModelBewertung: 4 von 5 Sternen4/5 (1)
- Restoration Agriculture: Real-World Permaculture for FarmersVon EverandRestoration Agriculture: Real-World Permaculture for FarmersBewertung: 4.5 von 5 Sternen4.5/5 (86)
- The Knowledge: How to Rebuild Our World from ScratchVon EverandThe Knowledge: How to Rebuild Our World from ScratchBewertung: 3.5 von 5 Sternen3.5/5 (133)
- How to Build a Car: The Autobiography of the World’s Greatest Formula 1 DesignerVon EverandHow to Build a Car: The Autobiography of the World’s Greatest Formula 1 DesignerBewertung: 4.5 von 5 Sternen4.5/5 (54)
- ChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindVon EverandChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindNoch keine Bewertungen
- The Assassination Complex: Inside the Government's Secret Drone Warfare ProgramVon EverandThe Assassination Complex: Inside the Government's Secret Drone Warfare ProgramBewertung: 4 von 5 Sternen4/5 (55)
- The Weather Machine: A Journey Inside the ForecastVon EverandThe Weather Machine: A Journey Inside the ForecastBewertung: 3.5 von 5 Sternen3.5/5 (31)
- Process Plant Equipment: Operation, Control, and ReliabilityVon EverandProcess Plant Equipment: Operation, Control, and ReliabilityBewertung: 5 von 5 Sternen5/5 (1)
- The Manager's Path: A Guide for Tech Leaders Navigating Growth and ChangeVon EverandThe Manager's Path: A Guide for Tech Leaders Navigating Growth and ChangeBewertung: 4.5 von 5 Sternen4.5/5 (99)