Das könnte Ihnen auch gefallen
- Grafik Data Pengamatan: 2. Proporsional Percobaan 1Dokument7 SeitenGrafik Data Pengamatan: 2. Proporsional Percobaan 1Yuli Sabiatussa'adahNoch keine Bewertungen
- RpdieukhiengocquayDokument9 SeitenRpdieukhiengocquay21151016Noch keine Bewertungen
- Kabale University: Faculty of Engineering & TechnologyDokument10 SeitenKabale University: Faculty of Engineering & Technologykazahuura EdwardNoch keine Bewertungen
- Level Control Loop Tuning Using Ziegler-Nicholas MethodDokument8 SeitenLevel Control Loop Tuning Using Ziegler-Nicholas MethodJanice NgNoch keine Bewertungen
- Final Water WayDokument8 SeitenFinal Water Wayabu bakkarNoch keine Bewertungen
- Cirrus Design Section 5 SR22 Performance DataDokument23 SeitenCirrus Design Section 5 SR22 Performance DataDon BachnerNoch keine Bewertungen
- Lab Title: Objectives: Material Required:: Sinusoidal Steady StateDokument11 SeitenLab Title: Objectives: Material Required:: Sinusoidal Steady Stateahmed shahNoch keine Bewertungen
- Power Electronics 2Dokument9 SeitenPower Electronics 2Jontelli SimonNoch keine Bewertungen
- Newest NewDokument4 SeitenNewest NewzakiNoch keine Bewertungen
- ME2142E Feedback and Control Lab - Frequency ResponseDokument9 SeitenME2142E Feedback and Control Lab - Frequency ResponseLinShaodun100% (4)
- Final Assignment Course: BUS525 (Managerial Economics)Dokument8 SeitenFinal Assignment Course: BUS525 (Managerial Economics)MushfiqNoch keine Bewertungen
- The PI Controlle1Dokument5 SeitenThe PI Controlle1YudhaNoch keine Bewertungen
- KAZAHUURA EDWARD (2) at EdwardDokument9 SeitenKAZAHUURA EDWARD (2) at Edwardkazahuura EdwardNoch keine Bewertungen
- 21 Quadrilateral Distance protection settings and calculationsDokument11 Seiten21 Quadrilateral Distance protection settings and calculationsteferayirgaNoch keine Bewertungen
- History and Specifications of an LCD ModuleDokument15 SeitenHistory and Specifications of an LCD ModuleLenovo IncognitoNoch keine Bewertungen
- LED Luminaire Photometric Test ReportDokument7 SeitenLED Luminaire Photometric Test ReportGonzalo LunaNoch keine Bewertungen
- Hw04 8thDokument4 SeitenHw04 8thPhyo Min TunNoch keine Bewertungen
- Problems: Log (Q) VS TDokument8 SeitenProblems: Log (Q) VS TDianita ZuamaNoch keine Bewertungen
- Introduction To Model Predictive Control: Dynamic Matrix Control (DMC) Iván D. Portnoy de La Ossa, M.E., M.SCDokument13 SeitenIntroduction To Model Predictive Control: Dynamic Matrix Control (DMC) Iván D. Portnoy de La Ossa, M.E., M.SCDaniela HerreraNoch keine Bewertungen
- PID and PI control of liquid level systemDokument9 SeitenPID and PI control of liquid level systemsyed zainNoch keine Bewertungen
- CIV 4013-Assignment 2010Dokument8 SeitenCIV 4013-Assignment 2010Virtual RealityNoch keine Bewertungen
- Cardenas, John Kenneth M. - A4-L2Dokument13 SeitenCardenas, John Kenneth M. - A4-L2dasij3880Noch keine Bewertungen
- Colector ProyectadoDokument45 SeitenColector ProyectadoAlonz CcenchoNoch keine Bewertungen
- 6.2 - Theory of Production and CostDokument15 Seiten6.2 - Theory of Production and CostShem Rafaella UrquizaNoch keine Bewertungen
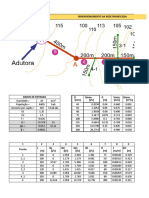
- Dimensionamento de Rede MalhadaDokument13 SeitenDimensionamento de Rede MalhadaERMANO CÉSAR DOS SANTOS SILVANoch keine Bewertungen
- Study of P, PD, Pi, Pid Controllers Using Mat LabDokument13 SeitenStudy of P, PD, Pi, Pid Controllers Using Mat LabVignesh NagarajanNoch keine Bewertungen
- WIND LOAD CALCULATION FOR WALLSDokument3 SeitenWIND LOAD CALCULATION FOR WALLSARYANoch keine Bewertungen
- Part 2 - Controller TuningDokument4 SeitenPart 2 - Controller TuningNGỌC LÊ THỊ THUNoch keine Bewertungen
- Project cash flow analysis and investment metricsDokument2 SeitenProject cash flow analysis and investment metricscatharina arnitaNoch keine Bewertungen
- Experiment: AIM: Study D.C Position Control SystemDokument23 SeitenExperiment: AIM: Study D.C Position Control SystemAryan BatraNoch keine Bewertungen
- Devraj Singh Sandhu 2021A1PS1589P Physics Lab P11N: Data Set: 11Dokument5 SeitenDevraj Singh Sandhu 2021A1PS1589P Physics Lab P11N: Data Set: 11dxcfyvghNoch keine Bewertungen
- Alhoussaini Private Residence Seismic AnalysisDokument17 SeitenAlhoussaini Private Residence Seismic AnalysisPrincess ToumaNoch keine Bewertungen
- The Time Constant of Thermocouple & Its Calibration: Experiment 1Dokument30 SeitenThe Time Constant of Thermocouple & Its Calibration: Experiment 1PrathamNoch keine Bewertungen
- Sri Chaitanya IIT Academy Key Sheet for JEE Advanced 2018 Paper 1Dokument15 SeitenSri Chaitanya IIT Academy Key Sheet for JEE Advanced 2018 Paper 1Zaid khanNoch keine Bewertungen
- Light Intensity Control: Technical Manual FORDokument7 SeitenLight Intensity Control: Technical Manual FORAAYUSH KUMARNoch keine Bewertungen
- Sri Chaitanya IIT Academy., India.: A Right Choice For The Real AspirantDokument15 SeitenSri Chaitanya IIT Academy., India.: A Right Choice For The Real AspirantZaid khanNoch keine Bewertungen
- Workshop#10 Report - Cascade Control of Jacketed Reactor - Roy - StewartDokument14 SeitenWorkshop#10 Report - Cascade Control of Jacketed Reactor - Roy - Stewartdevbones18Noch keine Bewertungen
- Digital Assignment-2 Process Automation and Control Lab LAB SLOT:-L33+L34Dokument32 SeitenDigital Assignment-2 Process Automation and Control Lab LAB SLOT:-L33+L34Goutham KrishnaNoch keine Bewertungen
- Regression Examples in ExcelDokument17 SeitenRegression Examples in ExcelTest UserNoch keine Bewertungen
- Sinclair Enterprise Physics Engineering ElectronicsDokument160 SeitenSinclair Enterprise Physics Engineering ElectronicsOsegasin Grupo AlertaNoch keine Bewertungen
- Process Dynamics and Control SolutionsDokument15 SeitenProcess Dynamics and Control Solutionsciotti620940% (5)
- Cascade ControllerDokument5 SeitenCascade Controllerblub blueNoch keine Bewertungen
- სემინარი 12Dokument45 Seitenსემინარი 12Daviti LabadzeNoch keine Bewertungen
- Statistics Exercise # 3Dokument8 SeitenStatistics Exercise # 3Sittie Farhana MacapaarNoch keine Bewertungen
- Assignment Chapter 6Dokument15 SeitenAssignment Chapter 6Nicolas ErnestoNoch keine Bewertungen
- Catatan RegresiDokument4 SeitenCatatan RegresiHABNoch keine Bewertungen
- ON-OFF Pulse Proportional Speed Control of A DC Motor Using Temperature SensorDokument8 SeitenON-OFF Pulse Proportional Speed Control of A DC Motor Using Temperature SensorWasan ShakirNoch keine Bewertungen
- Homework Problem 1: Given X (N), Plot x2 (N) X (3-n) +X (N) X (n-2)Dokument10 SeitenHomework Problem 1: Given X (N), Plot x2 (N) X (3-n) +X (N) X (n-2)Jarin TasnimNoch keine Bewertungen
- PID controller experiment determines optimal process controlDokument7 SeitenPID controller experiment determines optimal process controlMuhammad AdiwirawanNoch keine Bewertungen
- PLTM Pusaka-1 Shift ReportDokument4 SeitenPLTM Pusaka-1 Shift ReportHunter SiberiaNoch keine Bewertungen
- Tugas 6 Analisis Multivariat Data PanelDokument11 SeitenTugas 6 Analisis Multivariat Data Paneltiara yuristinaNoch keine Bewertungen
- CSTR in SeriesDokument3 SeitenCSTR in SeriesNURFATIHAH SYAMIMINoch keine Bewertungen
- Electrical ClearanceDokument37 SeitenElectrical Clearancepcsamy80% (5)
- CFW700 Inverter Specification SheetDokument1 SeiteCFW700 Inverter Specification SheetWashington PerimNoch keine Bewertungen
- Problems with Decline Curve Analysis and Production ForecastingDokument6 SeitenProblems with Decline Curve Analysis and Production ForecastingDianita Zuama100% (1)
- Report7 1Dokument22 SeitenReport7 121151016Noch keine Bewertungen
- Relay PID Auto TuningDokument8 SeitenRelay PID Auto TuningKamran KhanNoch keine Bewertungen
- Control of DC Motor Using Different Control StrategiesVon EverandControl of DC Motor Using Different Control StrategiesNoch keine Bewertungen
- Print Gambar KinalDokument1 SeitePrint Gambar KinalDea Aliftia FirdaushyaNoch keine Bewertungen
- Lembar PerhitunganDokument6 SeitenLembar PerhitunganDea Aliftia FirdaushyaNoch keine Bewertungen
- Lembar PerhitunganDokument11 SeitenLembar PerhitunganDea Aliftia FirdaushyaNoch keine Bewertungen
- Lembar PerhitunganDokument11 SeitenLembar PerhitunganDea Aliftia FirdaushyaNoch keine Bewertungen
- Vol T VM VK X Quk VM VK X PM X (1+ym) 22,4Dokument8 SeitenVol T VM VK X Quk VM VK X PM X (1+ym) 22,4Dea Aliftia FirdaushyaNoch keine Bewertungen
- Word PerpanDokument3 SeitenWord PerpanDea Aliftia FirdaushyaNoch keine Bewertungen
- Vibration ControlDokument380 SeitenVibration ControlfrancisNoch keine Bewertungen
- Proportional Control For Water Level in A Tank: Experiment No. 1Dokument5 SeitenProportional Control For Water Level in A Tank: Experiment No. 1Dioselle CastilloNoch keine Bewertungen
- C1 Overview and IntroductionDokument37 SeitenC1 Overview and IntroductionEncikAhmadNoch keine Bewertungen
- Ieee Wiley Ebooks Library Customer Title ListDokument14 SeitenIeee Wiley Ebooks Library Customer Title ListManideep Gupta ChikatmarlaNoch keine Bewertungen
- Process Dynamics and Control CourseDokument3 SeitenProcess Dynamics and Control CourseBiswasSayanNoch keine Bewertungen
- 1 Flexible Link ProjectDokument15 Seiten1 Flexible Link Projectprasaad08Noch keine Bewertungen
- Empowering Digital Transformation with Autonomous NetworksDokument14 SeitenEmpowering Digital Transformation with Autonomous NetworksTameta DadaNoch keine Bewertungen
- Filter Design ReportDokument28 SeitenFilter Design ReportDhruv VarshneyNoch keine Bewertungen
- Steady-State Error ProblemsDokument6 SeitenSteady-State Error ProblemsTam PhamNoch keine Bewertungen
- Emergency Power SystemDokument15 SeitenEmergency Power SystemIndra HazamiNoch keine Bewertungen
- Deogiri Institute Fan Speed Control Using ThermistorDokument16 SeitenDeogiri Institute Fan Speed Control Using ThermistorKomal ZalwarNoch keine Bewertungen
- Control and Monitoring of A Greenhouse Using PLC S7 1200 and Web Server in High Andean AreasDokument4 SeitenControl and Monitoring of A Greenhouse Using PLC S7 1200 and Web Server in High Andean AreasБ. ОтгонбаатарNoch keine Bewertungen
- Mece Engr 3350-Course Outline-F14 r02Dokument6 SeitenMece Engr 3350-Course Outline-F14 r02sunnyopgNoch keine Bewertungen
- Assignment 4 - ECE410F Linear Control Systems: Controllability and Stabilization of LTI Systems SolutionsDokument8 SeitenAssignment 4 - ECE410F Linear Control Systems: Controllability and Stabilization of LTI Systems SolutionsIsrael JimenezNoch keine Bewertungen
- ELGODokument41 SeitenELGOvatasaNoch keine Bewertungen
- Mathematical Modelling MCQsDokument11 SeitenMathematical Modelling MCQsshama JNoch keine Bewertungen
- LMI optimization for fixed-order H-infinity controller designDokument13 SeitenLMI optimization for fixed-order H-infinity controller designajitsatapthyNoch keine Bewertungen
- MT-323 Week 1AT2020pptDokument48 SeitenMT-323 Week 1AT2020pptTirth ParmarNoch keine Bewertungen
- Levcon Mold Level ControllerDokument10 SeitenLevcon Mold Level ControllerTerezinha Pires FerreiraNoch keine Bewertungen
- Manual 2dDokument148 SeitenManual 2dRaja Reddy100% (2)
- UntitledDokument81 SeitenUntitledAycan KobayNoch keine Bewertungen
- Industrial Process Control Course PDFDokument149 SeitenIndustrial Process Control Course PDFOmer50% (2)
- Elp225 Expt4 PDFDokument14 SeitenElp225 Expt4 PDFAnubhav BhatiaNoch keine Bewertungen
- Study open and closed loop tests to optimize process controlDokument20 SeitenStudy open and closed loop tests to optimize process controlanisNoch keine Bewertungen
- Hydraulic Fan Drive Systems: Technical InformationDokument64 SeitenHydraulic Fan Drive Systems: Technical InformationtrinaNoch keine Bewertungen
- Project Airbus IMSDokument3 SeitenProject Airbus IMSarifakademik2013Noch keine Bewertungen
- Textile Carding and Drawing Processes ExplainedDokument20 SeitenTextile Carding and Drawing Processes ExplainedsatexNoch keine Bewertungen
- 2010 Time Series - An Introduction To Nonlinear Empirical Modeling Bezruchko SmirnovDokument420 Seiten2010 Time Series - An Introduction To Nonlinear Empirical Modeling Bezruchko SmirnovHeraldo SouzaNoch keine Bewertungen
- 01-Connecting Things 2.0 Instructor Supplemental Materials Chapter1Dokument42 Seiten01-Connecting Things 2.0 Instructor Supplemental Materials Chapter1Jose Luis Urbina Bustios100% (4)