Das könnte Ihnen auch gefallen
- Circuit Diagram For WS6908 PDFDokument6 SeitenCircuit Diagram For WS6908 PDFdistefano67% (3)
- 1 General Description: 4-To-16 Line Decoder/demultiplexer With Input Latches InvertingDokument14 Seiten1 General Description: 4-To-16 Line Decoder/demultiplexer With Input Latches InvertingHeroe APNoch keine Bewertungen
- Schematic - 16 LED Chaser - 2021-05-17Dokument1 SeiteSchematic - 16 LED Chaser - 2021-05-17karlosrodNoch keine Bewertungen
- Chapter 1Dokument38 SeitenChapter 1Sudarshan GosaviNoch keine Bewertungen
- 74HC373 74HCT373: 1. General DescriptionDokument26 Seiten74HC373 74HCT373: 1. General DescriptionStuxnetNoch keine Bewertungen
- 74HC590Dokument18 Seiten74HC590Juan José Lopez NietoNoch keine Bewertungen
- W 49 F 002 Up 12 BDokument23 SeitenW 49 F 002 Up 12 BMiricel ConstantinNoch keine Bewertungen
- 8087Dokument32 Seiten8087Sumit ChopraNoch keine Bewertungen
- 74HC HCT574Dokument17 Seiten74HC HCT574Rama ChandanaNoch keine Bewertungen
- Intersil fn4584Dokument10 SeitenIntersil fn4584Hoii ClarkNoch keine Bewertungen
- Datasheet EEPROM W27C020P-70 (250K)Dokument14 SeitenDatasheet EEPROM W27C020P-70 (250K)vanmarteNoch keine Bewertungen
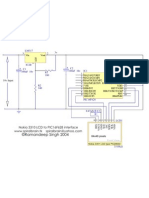
- ©ramandeep Singh 2004: Nokia 3310 LCD To PIC16F628 InterfaceDokument1 Seite©ramandeep Singh 2004: Nokia 3310 LCD To PIC16F628 InterfaceAnonymous GxeR0L100% (2)
- PIC PWM ControllerDokument10 SeitenPIC PWM Controllerkeitabando100% (2)
- General Description: Octal D-Type Flip-Flop With Data Enable Positive-Edge TriggerDokument15 SeitenGeneral Description: Octal D-Type Flip-Flop With Data Enable Positive-Edge TriggersmnguyenNoch keine Bewertungen
- ZZZZDokument1 SeiteZZZZid musicNoch keine Bewertungen
- Digital CalenderDokument1 SeiteDigital CalenderGarvitt BhatnagarNoch keine Bewertungen
- TermometroDokument1 SeiteTermometroRafael Macfú100% (1)
- Arduino PWM Generator With Duty Cycle Display 1Dokument1 SeiteArduino PWM Generator With Duty Cycle Display 1Teguh PriyonoNoch keine Bewertungen
- 256 Kbit (32Kb X 8) UV EPROM and OTP EPROM: DescriptionDokument17 Seiten256 Kbit (32Kb X 8) UV EPROM and OTP EPROM: DescriptionRafaelNoch keine Bewertungen
- 74HC590 PDFDokument21 Seiten74HC590 PDFKishenk KumarNoch keine Bewertungen
- Attiny26 CompleteDokument182 SeitenAttiny26 CompleteSandeep DavidNoch keine Bewertungen
- Schematic 12 129005Dokument1 SeiteSchematic 12 129005ALFONZO DANIELNoch keine Bewertungen
- Schematic - Microcontroller For Capstone - 2023-11-12Dokument1 SeiteSchematic - Microcontroller For Capstone - 2023-11-12Janmarc CorpuzNoch keine Bewertungen
- High-Performance Silicon-Gate CMOS: Semiconductor Technical DataDokument7 SeitenHigh-Performance Silicon-Gate CMOS: Semiconductor Technical DataDimon SergeevichNoch keine Bewertungen
- 28 C 64Dokument19 Seiten28 C 64thetkhinechoNoch keine Bewertungen
- QM - Artix7 - Xc7A35T DB: User ManualDokument19 SeitenQM - Artix7 - Xc7A35T DB: User ManualNgoc AnhNoch keine Bewertungen
- 512 Kbit (64Kb x8) UV EPROM and OTP EPROM: DescriptionDokument16 Seiten512 Kbit (64Kb x8) UV EPROM and OTP EPROM: DescriptionRafaelNoch keine Bewertungen
- DatasheetDokument11 SeitenDatasheetVăn Thành TiếnNoch keine Bewertungen
- 74HC273 74HCT273: 1. General DescriptionDokument17 Seiten74HC273 74HCT273: 1. General DescriptionAntony BurgersNoch keine Bewertungen
- Program Pins: Ma Tong SanfudaDokument1 SeiteProgram Pins: Ma Tong SanfudaHappySinghNoch keine Bewertungen
- Datasheet EEPROM W27C010-70 (128K)Dokument15 SeitenDatasheet EEPROM W27C010-70 (128K)vanmarteNoch keine Bewertungen
- MCP23008 I2C 21919bDokument40 SeitenMCP23008 I2C 21919bAMIR GHASEMINoch keine Bewertungen
- MPI4Dokument12 SeitenMPI4Sohira QaziNoch keine Bewertungen
- Alto A500.2 Power Amp Service Manual PDFDokument22 SeitenAlto A500.2 Power Amp Service Manual PDFmundomusicalmeriaNoch keine Bewertungen
- INTERSIL 82C54 CMOS Programmable Interval TimerDokument23 SeitenINTERSIL 82C54 CMOS Programmable Interval Timercarl.daviesNoch keine Bewertungen
- Block Diagram v5 - 03 PDFDokument1 SeiteBlock Diagram v5 - 03 PDFSrdjanVuksanNoch keine Bewertungen
- Avr Isp Usb AioDokument1 SeiteAvr Isp Usb Aiospy004100% (1)
- Inverterv3 PDFDokument1 SeiteInverterv3 PDFKhoa NguyễnNoch keine Bewertungen
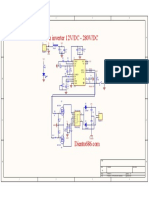
- M CH Inverter 12V/DC - 280V/DCDokument1 SeiteM CH Inverter 12V/DC - 280V/DCKhoa NguyễnNoch keine Bewertungen
- 3921 Fig 02Dokument1 Seite3921 Fig 02Matheus Régis Dias100% (2)
- Acer Aspire 5542 5542G (Wistron JV50-TR8) Wistron JV50-TR 8VRAM JV50-TR8 Rev-1Dokument63 SeitenAcer Aspire 5542 5542G (Wistron JV50-TR8) Wistron JV50-TR 8VRAM JV50-TR8 Rev-11cvbnmNoch keine Bewertungen
- High-Performance Silicon-Gate CMOS: Semiconductor Technical DataDokument8 SeitenHigh-Performance Silicon-Gate CMOS: Semiconductor Technical DataGonzaloGaldamesNoch keine Bewertungen
- MCP23009Dokument52 SeitenMCP23009João Oliveira BentesNoch keine Bewertungen
- 74HC595-Q100 74HCT595-Q100: 1. General DescriptionDokument20 Seiten74HC595-Q100 74HCT595-Q100: 1. General DescriptionMuhammad AzeemNoch keine Bewertungen
- CNC-satshakit CNC 20mhz SCHDokument1 SeiteCNC-satshakit CNC 20mhz SCHTomi OzzyNoch keine Bewertungen
- 11.3.2013 19:01:46 D:/work/eagle - projects/Mustang/ECU - SCH (Sheet: 1/6)Dokument6 Seiten11.3.2013 19:01:46 D:/work/eagle - projects/Mustang/ECU - SCH (Sheet: 1/6)Boris Zhilkin100% (1)
- Alto-DPA2500 4000 Service ManualDokument60 SeitenAlto-DPA2500 4000 Service ManualChuYurNoch keine Bewertungen
- 16 Kbit (2K X 8) Autostore Nvsram: Features Functional DescriptionDokument14 Seiten16 Kbit (2K X 8) Autostore Nvsram: Features Functional DescriptionFlorin RaduNoch keine Bewertungen
- M48T08 M48T18: 64 Kbit (8Kb X 8) TIMEKEEPER SramDokument19 SeitenM48T08 M48T18: 64 Kbit (8Kb X 8) TIMEKEEPER SramHAITHM MURSHEDNoch keine Bewertungen
- 711e9psDokument1 Seite711e9psElvis LinaresNoch keine Bewertungen
- This Simple, Low-Cost ADC Comprises A 12-Bit SAR ADC, Which Attaches To The Serial Port of The PC Through The RTS, CTS, and DTR LinesDokument1 SeiteThis Simple, Low-Cost ADC Comprises A 12-Bit SAR ADC, Which Attaches To The Serial Port of The PC Through The RTS, CTS, and DTR LinesVikas KushwahaNoch keine Bewertungen
- Interfacing 8251 With 8086 PDFDokument10 SeitenInterfacing 8251 With 8086 PDFMurthyNoch keine Bewertungen
- Faroe Dis x32 MB MV (18742-1 0gg02) PDFDokument69 SeitenFaroe Dis x32 MB MV (18742-1 0gg02) PDFRosa María AmoneNoch keine Bewertungen
- Wistron Jm70-Pu r-2 Schematics PDFDokument57 SeitenWistron Jm70-Pu r-2 Schematics PDFКирилNoch keine Bewertungen
- Scheme Acer Aspire 5740 Wistron jv71 TR PDFDokument61 SeitenScheme Acer Aspire 5740 Wistron jv71 TR PDFАлекс ХомичNoch keine Bewertungen
- W27C512 45Z PDFDokument20 SeitenW27C512 45Z PDFAbdelkrim RamdaneNoch keine Bewertungen
- MpuarchDokument33 SeitenMpuarchapi-3702016Noch keine Bewertungen
- Anais Do Workshop De Micro-ondasVon EverandAnais Do Workshop De Micro-ondasNoch keine Bewertungen
- Namaaz Pardhne Ka Tareeqa: Kanzuliman FoundationDokument18 SeitenNamaaz Pardhne Ka Tareeqa: Kanzuliman FoundationSyed Aqib AliNoch keine Bewertungen
- Week 11b ViewsDokument26 SeitenWeek 11b ViewsKenanNoch keine Bewertungen
- Quick Tutorial of EX-ConverterDokument3 SeitenQuick Tutorial of EX-ConverterhofariassNoch keine Bewertungen
- Module 1-Types of Verbs - 3Dokument18 SeitenModule 1-Types of Verbs - 3May Ann IgguaNoch keine Bewertungen
- Assignment 1 (102103375 Sunali)Dokument13 SeitenAssignment 1 (102103375 Sunali)ssunalibe21Noch keine Bewertungen
- CIT - 206 - Lecture - 1 - Introduction To Event Driven ProgrammingDokument17 SeitenCIT - 206 - Lecture - 1 - Introduction To Event Driven ProgrammingThobius JosephNoch keine Bewertungen
- 3 - The Bloodline - Abraham To MosesDokument40 Seiten3 - The Bloodline - Abraham To MosesmattlomeliNoch keine Bewertungen
- CS2311Dokument19 SeitenCS2311villixylooNoch keine Bewertungen
- Pump Station PLC ControlDokument9 SeitenPump Station PLC ControldanderjNoch keine Bewertungen
- Din Ling, 'Miss Sophia's Diary'Dokument2 SeitenDin Ling, 'Miss Sophia's Diary'StudenteNoch keine Bewertungen
- Educational Critique, Critical Thinking and Critial Philosophical TraditionsDokument10 SeitenEducational Critique, Critical Thinking and Critial Philosophical TraditionsBianca ComanNoch keine Bewertungen
- Verbo To Be 1.Dokument25 SeitenVerbo To Be 1.leny maritza alvarado huallccaNoch keine Bewertungen
- CS602 McqsDokument65 SeitenCS602 McqsMuhammad Falak SherNoch keine Bewertungen
- Copyreading and Headline WritingDokument40 SeitenCopyreading and Headline WritingGretel Andres100% (2)
- SVN IT SBA PROJECT - 2020 (Booklet)Dokument20 SeitenSVN IT SBA PROJECT - 2020 (Booklet)tamesh jodhanNoch keine Bewertungen
- Blond Hair RemindsDokument32 SeitenBlond Hair RemindsChristian BejadaNoch keine Bewertungen
- History of Andhra ChristiansDokument34 SeitenHistory of Andhra ChristiansImman KollamNoch keine Bewertungen
- Reflectio 1Dokument11 SeitenReflectio 1Ameenah Eiy CyNoch keine Bewertungen
- Diplopia by Paul VigilDokument44 SeitenDiplopia by Paul Vigil陈鑫100% (2)
- Function Is To Entertain The ReadersDokument2 SeitenFunction Is To Entertain The Readersedelweis salwa putriNoch keine Bewertungen
- Honest by Shawn Mendes (Chords)Dokument2 SeitenHonest by Shawn Mendes (Chords)XU YUNZHUNoch keine Bewertungen
- Ramadan Dua ListDokument12 SeitenRamadan Dua ListtestNoch keine Bewertungen
- The Notorious Collatz Conjecture: Terence Tao, UCLADokument63 SeitenThe Notorious Collatz Conjecture: Terence Tao, UCLASaransh Prajapati100% (1)
- TNPSC Group 1 NotificationDokument63 SeitenTNPSC Group 1 NotificationMonika AnnaduraiNoch keine Bewertungen
- Juan RulfoDokument7 SeitenJuan RulfoAnitaCampuzanoNoch keine Bewertungen
- Cara Setting Anonytun Dan Bug Host. XL - Indosat.tsel - Smart.axisDokument4 SeitenCara Setting Anonytun Dan Bug Host. XL - Indosat.tsel - Smart.axisBayu Ardhi NugrohoNoch keine Bewertungen
- WT Unit - 3 ServletsDokument296 SeitenWT Unit - 3 ServletsPrasanna PrasannaNoch keine Bewertungen
- Collocations - EnglishClub PDFDokument3 SeitenCollocations - EnglishClub PDFInés Amaya DíazNoch keine Bewertungen
- 1 - Philippine Pre-Colonial To Modern LiteratureDokument17 Seiten1 - Philippine Pre-Colonial To Modern LiteratureDalene Evangelio100% (1)
- Daily Lesson Plan: Mathematics Friday Numbers and Operation 1.0 Whole Numbers Up To 100Dokument7 SeitenDaily Lesson Plan: Mathematics Friday Numbers and Operation 1.0 Whole Numbers Up To 100nel5532Noch keine Bewertungen