Das könnte Ihnen auch gefallen
- Fiche Chaines de SolidesDokument7 SeitenFiche Chaines de Solidesayoub elNoch keine Bewertungen
- MODELISATION CINEMATIQUE COURS SI PC 2018-2019 (Él.)Dokument10 SeitenMODELISATION CINEMATIQUE COURS SI PC 2018-2019 (Él.)Andreas NGASTE100% (1)
- 2-Corrigé TD Hyperstisme-Mat-ReacteurDokument2 Seiten2-Corrigé TD Hyperstisme-Mat-ReacteurManel AyebNoch keine Bewertungen
- TD 2 Liaisons Schéma CinématiqueDokument6 SeitenTD 2 Liaisons Schéma CinématiqueNadhir MehellouNoch keine Bewertungen
- Systemes Isostatiques PDFDokument5 SeitenSystemes Isostatiques PDFImmamHadramyNoch keine Bewertungen
- Cours CPGE - Modélisation Des Actions MécaniquesDokument11 SeitenCours CPGE - Modélisation Des Actions MécaniquesAnonymous OG8ApT4go100% (2)
- Schéma CinématiqueDokument41 SeitenSchéma CinématiquesadikiNoch keine Bewertungen
- Cours Hyperstatique TempoDokument5 SeitenCours Hyperstatique TempoSCORSAM1Noch keine Bewertungen
- 208 Prehenseur CorrigeDokument4 Seiten208 Prehenseur CorrigeAhmed TalsiNoch keine Bewertungen
- 2 HyperstatismeDokument9 Seiten2 HyperstatismeMaha HammamiNoch keine Bewertungen
- Théorie Des Mécanismes LEq CoursDokument27 SeitenThéorie Des Mécanismes LEq CoursEasy Online ServicesNoch keine Bewertungen
- 01 Essui Glace de BusDokument2 Seiten01 Essui Glace de Busaazz38Noch keine Bewertungen
- Cinématique - DM - Genie Indus - VFDokument2 SeitenCinématique - DM - Genie Indus - VFFahd LahmidiNoch keine Bewertungen
- DS1 MP - 13 - 11 - 21 (Sujet)Dokument7 SeitenDS1 MP - 13 - 11 - 21 (Sujet)LASSOUED WAJDINoch keine Bewertungen
- Porte de GarageDokument2 SeitenPorte de Garageveronique jodkun0% (1)
- Modélisation Des MécanismesDokument5 SeitenModélisation Des MécanismesKamel BousninaNoch keine Bewertungen
- Exercice 1: CPGE - LIT - Marrakech Statique TD1 Pcsi1 OuikassiDokument1 SeiteExercice 1: CPGE - LIT - Marrakech Statique TD1 Pcsi1 Ouikassiakarne Youness100% (1)
- Chaines Des SolidesDokument9 SeitenChaines Des SolidesFree FireNoch keine Bewertungen
- TpChaineSolides CorrigéDokument9 SeitenTpChaineSolides CorrigéImen HammoudaNoch keine Bewertungen
- Liaisons Equival TDDokument18 SeitenLiaisons Equival TDAyou HamNoch keine Bewertungen
- Chap3 Hyperstatisme Et Mobilité Des MécanismesDokument21 SeitenChap3 Hyperstatisme Et Mobilité Des Mécanismesmamadou diopNoch keine Bewertungen
- PhysI TD2 PDFDokument1 SeitePhysI TD2 PDFDenilson Josemir100% (1)
- Corrigé Physique C 2008Dokument7 SeitenCorrigé Physique C 2008mardil2aNoch keine Bewertungen
- 11 - Cinematique Liaisons EquivalentesDokument19 Seiten11 - Cinematique Liaisons Equivalentessaded05Noch keine Bewertungen
- td1-MODELISATION DES MECANISMESDokument3 Seitentd1-MODELISATION DES MECANISMESKhaled GammoudiNoch keine Bewertungen
- Klubprepa Extrait 4758Dokument4 SeitenKlubprepa Extrait 4758Mimita LafleurNoch keine Bewertungen
- DS2 SiiDokument8 SeitenDS2 SiiAHMED ghribiNoch keine Bewertungen
- DEVOIR Porte de GarageDokument5 SeitenDEVOIR Porte de GarageSaïd Oumar GbaneNoch keine Bewertungen
- Cours 3CB Mecanique 1 ForcesDokument8 SeitenCours 3CB Mecanique 1 ForceshajjiNoch keine Bewertungen
- Cine Graph EleveDokument8 SeitenCine Graph EleveMohammed DahbiNoch keine Bewertungen
- FDokument13 SeitenFAziz AidaraNoch keine Bewertungen
- TD-1 Liaisons ActionsDokument3 SeitenTD-1 Liaisons Actionslailai hai0% (1)
- Série 2 Théorèmes Généraux CorrDokument7 SeitenSérie 2 Théorèmes Généraux Corrsalem nourNoch keine Bewertungen
- TD de SI - MécaniqueDokument3 SeitenTD de SI - MécaniqueArthur TigreatNoch keine Bewertungen
- Cours Cinematique GraphDokument11 SeitenCours Cinematique GraphEtienne BouronNoch keine Bewertungen
- MEC3 MobiliteDokument7 SeitenMEC3 Mobiliter_preNoch keine Bewertungen
- S411 Analyse Des Mecanismes 4Dokument7 SeitenS411 Analyse Des Mecanismes 4angamaNoch keine Bewertungen
- ExercicesofRigidbodiesmechanics ExercicesdemcaniquedesolidesrigidesDokument77 SeitenExercicesofRigidbodiesmechanics ExercicesdemcaniquedesolidesrigidesTàHa SamihNoch keine Bewertungen
- Liaisons Schema EleveDokument2 SeitenLiaisons Schema ElevewoulkanNoch keine Bewertungen
- Equilibrage DynamiqueDokument3 SeitenEquilibrage DynamiqueMahran GuesmiNoch keine Bewertungen
- 2 Bis - Bilan Liaisons Mecanique V MCDokument2 Seiten2 Bis - Bilan Liaisons Mecanique V MCnadiNoch keine Bewertungen
- Modélisation Cinématique Des Liaisons PDFDokument25 SeitenModélisation Cinématique Des Liaisons PDFSamir KhNoch keine Bewertungen
- Modelisation Cinematique (Compressé)Dokument31 SeitenModelisation Cinematique (Compressé)Larbi ElbakkaliNoch keine Bewertungen
- Sinus MaticDokument3 SeitenSinus MaticAbdelali YacoubiNoch keine Bewertungen
- 07-Rep SchematisationDokument10 Seiten07-Rep SchematisationBouHouchNoch keine Bewertungen
- Chap4 Dynamique Solide VAS2 Potel GatignolDokument22 SeitenChap4 Dynamique Solide VAS2 Potel GatignolMohamedAliJlidiNoch keine Bewertungen
- DM 2020 L2spiDokument4 SeitenDM 2020 L2spiMohammed RguiyegNoch keine Bewertungen
- Cours Modelisation Des Liaisons PRDokument4 SeitenCours Modelisation Des Liaisons PRAgriIT •Noch keine Bewertungen
- Sec Minesponts 2004 Sic PSIDokument12 SeitenSec Minesponts 2004 Sic PSIAlexandre BourrieauNoch keine Bewertungen
- 32 Fermeture Geo ExercicesDokument4 Seiten32 Fermeture Geo Exerciceslaalai faicelNoch keine Bewertungen
- Numeration EleecDokument21 SeitenNumeration EleecSalif NanaNoch keine Bewertungen
- 32 Loi Entrée Sortie Géométrique D 1Dokument6 Seiten32 Loi Entrée Sortie Géométrique D 1hsn frk100% (1)
- MECA - Cours 1ADokument3 SeitenMECA - Cours 1Acyk4y44Noch keine Bewertungen
- TD1 4Dokument4 SeitenTD1 4Mohamed AbaakilNoch keine Bewertungen
- Centre D Usinage 5 Axes CorrigeDokument2 SeitenCentre D Usinage 5 Axes CorrigeLAILA IDRISSINoch keine Bewertungen
- CI05 TD14 Corrigé - Déterminer Le Modèle de Connaissance D - Un Système Asservi PerturbéDokument8 SeitenCI05 TD14 Corrigé - Déterminer Le Modèle de Connaissance D - Un Système Asservi PerturbéKhaled JberiNoch keine Bewertungen
- Liaisons EquivalDokument5 SeitenLiaisons EquivalKamel BousninaNoch keine Bewertungen
- Hyperstatisme Et Mobilité: Liaisons en ParallèleDokument11 SeitenHyperstatisme Et Mobilité: Liaisons en ParallèleMohamed OuaggaNoch keine Bewertungen
- EF PourtiqueDokument9 SeitenEF Pourtiquehassene elyassNoch keine Bewertungen
- MP ch2Dokument29 SeitenMP ch2AFADNoch keine Bewertungen
- Verin ElectriqueDokument1 SeiteVerin ElectriqueImmamHadramyNoch keine Bewertungen
- Tableau LiaisonsDokument2 SeitenTableau LiaisonsImmamHadramyNoch keine Bewertungen
- Projet MatlabDokument13 SeitenProjet MatlabImmamHadramyNoch keine Bewertungen
- Ex HyperstatismeDokument4 SeitenEx HyperstatismeImmamHadramyNoch keine Bewertungen
- R.stage (Naoumia Aymen)Dokument27 SeitenR.stage (Naoumia Aymen)ImmamHadramyNoch keine Bewertungen
- Pince RobotDokument2 SeitenPince RobotImmamHadramyNoch keine Bewertungen
- 341 Liste Logiciels GeDokument10 Seiten341 Liste Logiciels GemazrouiNoch keine Bewertungen
- Instal BT ProfDokument31 SeitenInstal BT ProfImmamHadramyNoch keine Bewertungen
- Liste 1 Concours Entretien MECDokument7 SeitenListe 1 Concours Entretien MECImmamHadramyNoch keine Bewertungen
- TP TD 2Dokument2 SeitenTP TD 2ImmamHadramyNoch keine Bewertungen
- TP EnsaDokument1 SeiteTP EnsaImmamHadramyNoch keine Bewertungen
- Asservessemenet de La Vitesse Lineaire 10 PDFDokument28 SeitenAsservessemenet de La Vitesse Lineaire 10 PDFImmamHadramy100% (2)
- 5385 B 108129 DDDokument5 Seiten5385 B 108129 DDImmamHadramy100% (1)
- 32 Resolution Probleme PDFDokument5 Seiten32 Resolution Probleme PDFImmamHadramy0% (1)
- Capteurs 2e CorrigesDokument60 SeitenCapteurs 2e CorrigesImmamHadramyNoch keine Bewertungen
- 2015 04 19 TD2Dokument7 Seiten2015 04 19 TD2ImmamHadramy100% (1)
- 2015 04 19 Examen GMDokument4 Seiten2015 04 19 Examen GMImmamHadramyNoch keine Bewertungen
- 2015 04 19 TD1Dokument3 Seiten2015 04 19 TD1David Ag50% (2)
- Ex1 Capteurs GSI 1011Dokument8 SeitenEx1 Capteurs GSI 1011ImmamHadramyNoch keine Bewertungen
- Ex1 Capteurs GSI 1011Dokument8 SeitenEx1 Capteurs GSI 1011ImmamHadramyNoch keine Bewertungen
- 11 - Amdec Résumé Par Hadramy MécatroniqueDokument6 Seiten11 - Amdec Résumé Par Hadramy MécatroniqueImmamHadramyNoch keine Bewertungen
- TP1 Intro EclipseDokument13 SeitenTP1 Intro EclipseImmamHadramyNoch keine Bewertungen
- La Gestion Technique Centralisée. Qu'est Ce Que C'est ? A Quoi Ça Sert ?Dokument6 SeitenLa Gestion Technique Centralisée. Qu'est Ce Que C'est ? A Quoi Ça Sert ?ImmamHadramyNoch keine Bewertungen
- Exercices RedressementDokument23 SeitenExercices Redressementarnaud2990% (10)
- Nettoyage ClarificateurDokument7 SeitenNettoyage Clarificateurmimoon1Noch keine Bewertungen
- Etude Et Conception D'un Centre Commercial R+2 en Charpente MétalliqueDokument176 SeitenEtude Et Conception D'un Centre Commercial R+2 en Charpente MétalliqueRaya RayanNoch keine Bewertungen
- Chapitre 6. Effort TranchantDokument12 SeitenChapitre 6. Effort TranchantAbdoul Nasser Ousseini DaoudaNoch keine Bewertungen
- ANALYSE DESCENDANT (Ex)Dokument4 SeitenANALYSE DESCENDANT (Ex)Med FilaliNoch keine Bewertungen
- DALOTDokument9 SeitenDALOTOUEDRAOGO IdrissaNoch keine Bewertungen
- Catalogue Pieces Detachess 090517Dokument145 SeitenCatalogue Pieces Detachess 090517GagrigoreNoch keine Bewertungen
- Examen de Froid Solaire-Master 01 de 2015Dokument1 SeiteExamen de Froid Solaire-Master 01 de 2015Abdellatif OudraneNoch keine Bewertungen
- Cours Froid Solaire MPons Part 1 2Dokument56 SeitenCours Froid Solaire MPons Part 1 2Kãrîm KåhlìNoch keine Bewertungen
- Expérience de MilikanDokument5 SeitenExpérience de Milikanmartin_heritier3710Noch keine Bewertungen
- CodeErreurHIAB Avant 2003Dokument18 SeitenCodeErreurHIAB Avant 2003HTR WAS HERE100% (1)
- Pneumatiques Et Rotules de DirectionDokument4 SeitenPneumatiques Et Rotules de DirectionyassineNoch keine Bewertungen
- Memoire de Master: Option: Conception DesDokument48 SeitenMemoire de Master: Option: Conception DesKalosoiretrotchgmail.com KalosoNoch keine Bewertungen
- IEC 60953-1-1990 ScanDokument168 SeitenIEC 60953-1-1990 ScanMuhammad Dzaky FarhanNoch keine Bewertungen
- Im Gaz3000w Zs30-Zw-30-Ae FRDokument28 SeitenIm Gaz3000w Zs30-Zw-30-Ae FROussamaHachefNoch keine Bewertungen
- Chapitre 3 - Changement de RéférentielDokument10 SeitenChapitre 3 - Changement de RéférentielHamza BoutlihNoch keine Bewertungen
- Note de Calcul BNI OUJELDokument5 SeitenNote de Calcul BNI OUJELMuhcineNoch keine Bewertungen
- 06 PDFDokument2 Seiten06 PDFELIE RobertNoch keine Bewertungen
- Ecoulements Surface LibreDokument39 SeitenEcoulements Surface LibreAzzedine GarahNoch keine Bewertungen
- TP1 SimulationDokument4 SeitenTP1 SimulationBoudjaouiNoch keine Bewertungen
- Rapport de Stage Maher MNASRIDokument31 SeitenRapport de Stage Maher MNASRIjlali tarek100% (1)
- Cours CDMDokument43 SeitenCours CDMhachm ayoubNoch keine Bewertungen
- Conception Train D'atterrissageDokument49 SeitenConception Train D'atterrissageKaoutar BouqdirNoch keine Bewertungen
- TP 2. VibrationDokument7 SeitenTP 2. Vibrationbekabdellah4Noch keine Bewertungen
- Revue Technique GY6Dokument166 SeitenRevue Technique GY6xabi etchebarneNoch keine Bewertungen
- TP 2Dokument11 SeitenTP 2Boulayad imadNoch keine Bewertungen
- Ms GC Nehari+Nadji PDFDokument159 SeitenMs GC Nehari+Nadji PDFYOUSSEFNoch keine Bewertungen
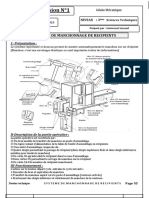
- Suj Et de Révision #1: Systeme de Manchonnage de RecipientsDokument3 SeitenSuj Et de Révision #1: Systeme de Manchonnage de Recipientshamrouni100% (2)
- Chapitre 3 - STDokument16 SeitenChapitre 3 - STDeghboudj SamirNoch keine Bewertungen
- Performances Ew NoirDokument3 SeitenPerformances Ew NoirJean-Noël LEROUXNoch keine Bewertungen
- Les Ondes Mécanique ProgressivesDokument16 SeitenLes Ondes Mécanique ProgressivesAhmed Ben NhilaNoch keine Bewertungen