Das könnte Ihnen auch gefallen
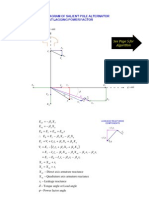
- Synchronous (Salient Pole) Machine Phasor DiagramDokument5 SeitenSynchronous (Salient Pole) Machine Phasor DiagramMELVIN88% (8)
- Quadratic functions test part 1Dokument4 SeitenQuadratic functions test part 1AnonymousNoch keine Bewertungen
- Sertifikat Akreditasi Psik AsliDokument1 SeiteSertifikat Akreditasi Psik Asliaris diyantoNoch keine Bewertungen
- PMSM DSP Control SystemDokument8 SeitenPMSM DSP Control SystemAntiroNoch keine Bewertungen
- Img 0001Dokument1 SeiteImg 0001ovidiu2014Noch keine Bewertungen
- Terminal Examination Time-Table 2023-24 - 20230817 - 0001Dokument1 SeiteTerminal Examination Time-Table 2023-24 - 20230817 - 0001jayasribag2Noch keine Bewertungen
- Thank You, LordDokument1 SeiteThank You, LordJERICHO ROMANNoch keine Bewertungen
- Tšello Saint SaensDokument16 SeitenTšello Saint SaensKärt RannikNoch keine Bewertungen
- Sports-Improve Your EnglishDokument6 SeitenSports-Improve Your EnglishGwen GalaNoch keine Bewertungen
- 2014 00d - Generators, Transformers, Per Unit System PDFDokument99 Seiten2014 00d - Generators, Transformers, Per Unit System PDFDanny MartinNoch keine Bewertungen
- Freely: BoundaryDokument7 SeitenFreely: BoundaryTitu RajputNoch keine Bewertungen
- Lecture 17Dokument9 SeitenLecture 17Abhideep KhareNoch keine Bewertungen
- Mo 2Dokument2 SeitenMo 2Mr. samir ashourNoch keine Bewertungen
- Aits 2223 PT II Jeea TD Paper 1 SolDokument17 SeitenAits 2223 PT II Jeea TD Paper 1 SolTanman RajNoch keine Bewertungen
- DX DT 1 2 10: OscillationsDokument60 SeitenDX DT 1 2 10: Oscillationswentuphill0Noch keine Bewertungen
- Img 20240221 0002Dokument1 SeiteImg 20240221 0002pranabsarkar326Noch keine Bewertungen
- 111 2 FinalDokument9 Seiten111 2 Finalkenny940201Noch keine Bewertungen
- Transformer With On-Load Tap-Changer: Shandong Dachi Electric Co, LTDDokument1 SeiteTransformer With On-Load Tap-Changer: Shandong Dachi Electric Co, LTDArjunansyah LakidendeNoch keine Bewertungen
- Thoai HorstDokument11 SeitenThoai HorstHoang TranNoch keine Bewertungen
- Daftar Hadir Ortu SiswaDokument1 SeiteDaftar Hadir Ortu SiswaDomuNoch keine Bewertungen
- Biharmonic equation applications in solid mechanics and fluid flowDokument1 SeiteBiharmonic equation applications in solid mechanics and fluid flowRam PrakashNoch keine Bewertungen
- 004-Commerce November-2019 Smco54Dokument3 Seiten004-Commerce November-2019 Smco54Karthick KumaravelNoch keine Bewertungen
- AmrLipi Key Map for Upper and Lower Case CharactersDokument1 SeiteAmrLipi Key Map for Upper and Lower Case CharactersRight ClipsNoch keine Bewertungen
- Final Formula Sht2Dokument1 SeiteFinal Formula Sht2maxdweeks0% (1)
- Parallelogram HomeworkDokument2 SeitenParallelogram Homeworktae hyungNoch keine Bewertungen
- Ri:s:s: Is $-'Ef EE S/ss$i+Dokument1 SeiteRi:s:s: Is $-'Ef EE S/ss$i+ovidiu2014Noch keine Bewertungen
- IMG - 0094 MCQ College Algebra 179Dokument1 SeiteIMG - 0094 MCQ College Algebra 179bnqr584bNoch keine Bewertungen
- Anmol UlDokument1 SeiteAnmol UlSunil VadheraNoch keine Bewertungen
- Ms Exccl Ycogj J CL Dczocw Wwic Wxc/Vzi RPI: y 4 c.6t 018,: Coq8z T X: Sor Moj A GDokument1 SeiteMs Exccl Ycogj J CL Dczocw Wwic Wxc/Vzi RPI: y 4 c.6t 018,: Coq8z T X: Sor Moj A GZaw Ko Ko OoNoch keine Bewertungen
- Sensitivity Analysis of Synchronous GeneratorsDokument3 SeitenSensitivity Analysis of Synchronous GeneratorsKevin RamonNoch keine Bewertungen
- 醫學系 2024 02 27 題庫Dokument16 Seiten醫學系 2024 02 27 題庫bruce10931052Noch keine Bewertungen
- Ad document focuses on education reformDokument9 SeitenAd document focuses on education reformMariel PanesNoch keine Bewertungen
- Pajak STNK B9046NEH (2023-2024)Dokument1 SeitePajak STNK B9046NEH (2023-2024)dishub pkbNoch keine Bewertungen
- Network Theory - FiltersDokument7 SeitenNetwork Theory - FiltersHarsh GajjarNoch keine Bewertungen
- Annex C List of Plantilla of Personnel For FY 2020 CompressedDokument3 SeitenAnnex C List of Plantilla of Personnel For FY 2020 CompressedEunica April Catahan FloresNoch keine Bewertungen
- Diff Eq SummaryDokument5 SeitenDiff Eq SummaryLuca MorenoNoch keine Bewertungen
- IRG4PC40U: Fig. 8 - Typical Gate Charge vs. Fig. 7 - Typical Capacitance VsDokument1 SeiteIRG4PC40U: Fig. 8 - Typical Gate Charge vs. Fig. 7 - Typical Capacitance VsPaolo RossiNoch keine Bewertungen
- Img 20220702 0001Dokument6 SeitenImg 20220702 0001Dede IlhamNoch keine Bewertungen
- Finding solutions through open communicationDokument1 SeiteFinding solutions through open communicationbhakti persadaNoch keine Bewertungen
- Сканировать10003Dokument1 SeiteСканировать10003Parole FotoNoch keine Bewertungen
- Img 007Dokument1 SeiteImg 007lzyNoch keine Bewertungen
- Img 20210114 0001Dokument1 SeiteImg 20210114 0001Agustina SiregarNoch keine Bewertungen
- HMW1Dokument5 SeitenHMW1Junior LimaNoch keine Bewertungen
- Eigenvalues and eigenvectors explainedDokument5 SeitenEigenvalues and eigenvectors explainedING.CIVILNoch keine Bewertungen
- Organometallics CH 8 NotesDokument11 SeitenOrganometallics CH 8 NotesSankar AdhikariNoch keine Bewertungen
- TD Modern Physics Lawrentz TransformationDokument7 SeitenTD Modern Physics Lawrentz TransformationusaroufNoch keine Bewertungen
- Previous Years' Board Questions (12) Chapter - Definite IntegralsDokument8 SeitenPrevious Years' Board Questions (12) Chapter - Definite IntegralsJatinder KaurNoch keine Bewertungen
- Đề 2 MI1124 20222Dokument9 SeitenĐề 2 MI1124 20222tan12t1lhpNoch keine Bewertungen
- Conic Sections: Circles, Parabolas, Ellipses, and HyperbolasDokument5 SeitenConic Sections: Circles, Parabolas, Ellipses, and Hyperbolasczar czarNoch keine Bewertungen
- Spanish - Letters and Sounds 2008Dokument16 SeitenSpanish - Letters and Sounds 2008irinaNoch keine Bewertungen
- Lxe 2Rj: RacetteDokument3 SeitenLxe 2Rj: RacetteRajat Verma X D 39Noch keine Bewertungen
- Img 0013Dokument1 SeiteImg 0013bhakti persadaNoch keine Bewertungen
- BNQF Framework (Level 7 Ot 10)Dokument27 SeitenBNQF Framework (Level 7 Ot 10)FaisalNoch keine Bewertungen
- LPB 155 Kltu Sby 2022Dokument2 SeitenLPB 155 Kltu Sby 2022ksdgroup 8Noch keine Bewertungen
- CapacitorDokument37 SeitenCapacitorAshok PradhanNoch keine Bewertungen
- A.5 Daftar Kunjungan PerpustakaanDokument4 SeitenA.5 Daftar Kunjungan PerpustakaanmtspuimajakurmerNoch keine Bewertungen
- Sofía Sánchez 3Dokument1 SeiteSofía Sánchez 3EL HAMOR DE THU BIDANoch keine Bewertungen
- SP Am1 en AUMADokument1 SeiteSP Am1 en AUMATamas KubolaNoch keine Bewertungen
- Parametric Equations of a Line TutorialDokument3 SeitenParametric Equations of a Line TutorialNguyễn Lê Quốc HưngNoch keine Bewertungen
- EnergQual Prac2Dokument16 SeitenEnergQual Prac2Sergio CarrilloNoch keine Bewertungen
- Philips Product Selector 5.2.12.2 This Product Selector Works With Dialux 4.0 and Later Relux 2006 and Later Autodesk Viz 2008 3Ds Max 2008-2011Dokument1 SeitePhilips Product Selector 5.2.12.2 This Product Selector Works With Dialux 4.0 and Later Relux 2006 and Later Autodesk Viz 2008 3Ds Max 2008-2011Sergio CarrilloNoch keine Bewertungen
- DIALUXDokument2 SeitenDIALUXSergio CarrilloNoch keine Bewertungen
- Práctica 1 - Distribución de Frecuencia y GráficasDokument4 SeitenPráctica 1 - Distribución de Frecuencia y GráficasSergio CarrilloNoch keine Bewertungen
- PX7203 SpecialElectricalMachinesDokument11 SeitenPX7203 SpecialElectricalMachines1balamanianNoch keine Bewertungen
- EASA Module 3i MCQ (114 Questions)Dokument46 SeitenEASA Module 3i MCQ (114 Questions)Junaid YounusNoch keine Bewertungen
- ESO203A Lab Manual 2015Dokument47 SeitenESO203A Lab Manual 2015Apoorva KhandelwalNoch keine Bewertungen
- Physics Motors and Generators PDFDokument20 SeitenPhysics Motors and Generators PDFlen2000Noch keine Bewertungen
- Nikola TeslaDokument29 SeitenNikola TeslaMirela Tita80% (5)
- 2005 Vol. 33 No. 04 The Earth Inductor CompassDokument3 Seiten2005 Vol. 33 No. 04 The Earth Inductor CompassDaniel NguyễnNoch keine Bewertungen
- Qbank MachinesDokument12 SeitenQbank MachinessamkousNoch keine Bewertungen
- Swinburne Test: Loss Summation Method in DC Shunt MachinesDokument8 SeitenSwinburne Test: Loss Summation Method in DC Shunt MachinesDilip TheLipNoch keine Bewertungen
- Howard Johnson - Permanent Magnet MotorDokument50 SeitenHoward Johnson - Permanent Magnet MotorDavid Reaster67% (3)
- Copper Controlled DC Drive DenuDokument8 SeitenCopper Controlled DC Drive DenuDenuka PathiranaNoch keine Bewertungen
- DC MOTOR - EnerconDokument19 SeitenDC MOTOR - EnerconJoanna Fabricante100% (1)
- Electric Motor PresentationDokument19 SeitenElectric Motor Presentationupendra35Noch keine Bewertungen
- Karakteristik Motor KomponDokument14 SeitenKarakteristik Motor KomponPola RismaNoch keine Bewertungen
- Parallel Operation of DC GeneratorsDokument2 SeitenParallel Operation of DC GeneratorsNino Gabriel Esguerra67% (3)
- Chapter 12Dokument51 SeitenChapter 12Abdullah Akram BajwaNoch keine Bewertungen
- Synchronous Machine Excitation SystemsDokument49 SeitenSynchronous Machine Excitation SystemsWoldemariam WorkuNoch keine Bewertungen
- Bhanu Brose Excursion ReportDokument6 SeitenBhanu Brose Excursion ReportBhanu Pratap SinghNoch keine Bewertungen
- Batch 2013 Fyp ReportDokument130 SeitenBatch 2013 Fyp ReportjunaidNoch keine Bewertungen
- Assignment 1 EED203Dokument3 SeitenAssignment 1 EED203sagrvNoch keine Bewertungen
- 12 - Permanent Magnet DC Machine Simulation in MATLAB SimulinkDokument6 Seiten12 - Permanent Magnet DC Machine Simulation in MATLAB Simulinkabhishek_9990100% (2)
- Defence RobotDokument50 SeitenDefence RobotVinay SinghNoch keine Bewertungen
- Viscosity measurement techniquesDokument78 SeitenViscosity measurement techniquesYuvraj Bhandal100% (1)
- DC Generator: Construction and WorkingDokument7 SeitenDC Generator: Construction and WorkingGlen Howell PanesNoch keine Bewertungen
- Project Report Intelligent Breaking System 2Dokument30 SeitenProject Report Intelligent Breaking System 2sagar89% (9)
- 9A02505 Electrical Machines-IIIDokument4 Seiten9A02505 Electrical Machines-IIIsivabharathamurthyNoch keine Bewertungen
- Scilab ManualDokument44 SeitenScilab ManualMeer Mustafa AliNoch keine Bewertungen
- Speed Control of DC MotorDokument10 SeitenSpeed Control of DC MotorYadira RocanoNoch keine Bewertungen
- Circuit Recloser With Bistable Electromagnetic ActuatorDokument16 SeitenCircuit Recloser With Bistable Electromagnetic ActuatorRicardo DoldanNoch keine Bewertungen
- Elements of Electrical DesignDokument2 SeitenElements of Electrical DesignmitulNoch keine Bewertungen
- Marine Electrotechnology GuideDokument49 SeitenMarine Electrotechnology GuideFait HeeNoch keine Bewertungen