Das könnte Ihnen auch gefallen
- Proceedings of the Metallurgical Society of the Canadian Institute of Mining and Metallurgy: Proceedings of the International Symposium on Fracture Mechanics, Winnipeg, Canada, August 23-26, 1987Von EverandProceedings of the Metallurgical Society of the Canadian Institute of Mining and Metallurgy: Proceedings of the International Symposium on Fracture Mechanics, Winnipeg, Canada, August 23-26, 1987W. R. TysonNoch keine Bewertungen
- Production Gas Carburising: The Pergamon Materials Engineering Practice SeriesVon EverandProduction Gas Carburising: The Pergamon Materials Engineering Practice SeriesNoch keine Bewertungen
- Lab Manual Electrical Machines Lab PTUKDokument151 SeitenLab Manual Electrical Machines Lab PTUKTareq FoQhaNoch keine Bewertungen
- Du Dub PDFDokument55 SeitenDu Dub PDFSURESH100% (1)
- GERBDokument1 SeiteGERBdevasshuklaNoch keine Bewertungen
- Bearing Pad - Regular Test 1 PDFDokument1 SeiteBearing Pad - Regular Test 1 PDFShoyeeb AhmedNoch keine Bewertungen
- Flange Coupling Lab PDFDokument25 SeitenFlange Coupling Lab PDFAli Raza MalikNoch keine Bewertungen
- Beam Deflection - Theory PDFDokument2 SeitenBeam Deflection - Theory PDFHaikal HakimNoch keine Bewertungen
- Lectures Week 8 - Viscoelastic MaterialsDokument6 SeitenLectures Week 8 - Viscoelastic MaterialschrihiNoch keine Bewertungen
- The Reynolds Centennial - A Brief History of The Theory of Hydrodynamic LubricationDokument14 SeitenThe Reynolds Centennial - A Brief History of The Theory of Hydrodynamic LubricationAng Jia YinNoch keine Bewertungen
- TN HTB CylindricalLensesDokument8 SeitenTN HTB CylindricalLensesNina DjawaNoch keine Bewertungen
- Module 1 MergedDokument209 SeitenModule 1 MergedDivyansh JainNoch keine Bewertungen
- Final Edr ReportDokument10 SeitenFinal Edr ReportNitin KharetaNoch keine Bewertungen
- Electric Motor Basics: Why Are Rotors Skewed?: by Cyndi Nyberg EASA Technical Support SpecialistDokument2 SeitenElectric Motor Basics: Why Are Rotors Skewed?: by Cyndi Nyberg EASA Technical Support SpecialistsebastianNoch keine Bewertungen
- Surface EngineeringDokument43 SeitenSurface Engineering10rajNoch keine Bewertungen
- 4.1 Forces Values: Ch.4 Delta Robot Stress Analysis & ManufacturingDokument20 Seiten4.1 Forces Values: Ch.4 Delta Robot Stress Analysis & ManufacturingAhmed ElkershNoch keine Bewertungen
- ME8595-Thermal Engineering-II Valliammai PDFDokument19 SeitenME8595-Thermal Engineering-II Valliammai PDFSiva SubramaniamNoch keine Bewertungen
- Knuckle Joints DesignDokument10 SeitenKnuckle Joints DesignKvrd Prasad100% (1)
- Unit1 - Fundamentals of DesignDokument57 SeitenUnit1 - Fundamentals of DesignKunal AhiwaleNoch keine Bewertungen
- Aeroelastic GallopingDokument17 SeitenAeroelastic GallopingMalika NavaratnaNoch keine Bewertungen
- 1.0 TitleDokument10 Seiten1.0 TitlezackziffiNoch keine Bewertungen
- SEC Mechatronics Lab Manual R2013 Shan PDFDokument93 SeitenSEC Mechatronics Lab Manual R2013 Shan PDFMonish KumarNoch keine Bewertungen
- Effect of Shot Peening On The Fatigue Life of 2024 Aluminum Alloy PDFDokument12 SeitenEffect of Shot Peening On The Fatigue Life of 2024 Aluminum Alloy PDFLuis Gustavo PachecoNoch keine Bewertungen
- Pneumatic Sheet Metal Shearing MachineDokument21 SeitenPneumatic Sheet Metal Shearing MachineGamerNoch keine Bewertungen
- EDDokument8 SeitenEDAmarNoch keine Bewertungen
- Chapter 1 Part ADokument26 SeitenChapter 1 Part AYip Tuck WaiNoch keine Bewertungen
- L4.1 - Production Equipment & Tooling SelectionDokument109 SeitenL4.1 - Production Equipment & Tooling Selectiondawit gashuNoch keine Bewertungen
- Ansys Report of Knuckle JointDokument27 SeitenAnsys Report of Knuckle JointNíthìsh GøwdåNoch keine Bewertungen
- Comparative Study and Static Analysis of Piston Using Solid Edge and AnsysDokument23 SeitenComparative Study and Static Analysis of Piston Using Solid Edge and AnsysIJRASETPublicationsNoch keine Bewertungen
- PIN FINsDokument43 SeitenPIN FINsArpanNoch keine Bewertungen
- Fire Fighter Robot With Night Vision CameraDokument7 SeitenFire Fighter Robot With Night Vision CameraKrish KalyanNoch keine Bewertungen
- 5-Comparision Festo - Electrical Vs PneumaticDokument67 Seiten5-Comparision Festo - Electrical Vs PneumaticDonneil Frederiche Ong YabutNoch keine Bewertungen
- Pipe Inspection RobotDokument19 SeitenPipe Inspection RobotJeevan Landge PatilNoch keine Bewertungen
- FT Lab Manual27-12-17 PDFDokument48 SeitenFT Lab Manual27-12-17 PDFJay JoshiNoch keine Bewertungen
- Unit - V: Single Phase Induction Motors and Special MachinesDokument49 SeitenUnit - V: Single Phase Induction Motors and Special MachinessasikalasivakumarNoch keine Bewertungen
- Study of Basic Elements of Various Power PlantsDokument3 SeitenStudy of Basic Elements of Various Power PlantsRajendrakumar B Varia67% (3)
- JNTU - H R05 Mechanical Syllabus BookDokument48 SeitenJNTU - H R05 Mechanical Syllabus Bookchepurthi100% (2)
- Level Monitor DATUM SCU500 LOOPDokument20 SeitenLevel Monitor DATUM SCU500 LOOPJose Manuel Vazquez ZarcoNoch keine Bewertungen
- Stepper Motor CatalogueDokument28 SeitenStepper Motor CatalogueSuvek KumarNoch keine Bewertungen
- Tabletop CNC Wire Bender Machine Using DXF by Generating CNC CodesDokument4 SeitenTabletop CNC Wire Bender Machine Using DXF by Generating CNC CodesPrasanna RahmaniacNoch keine Bewertungen
- 62235-mt - Thermal Power PlantsDokument2 Seiten62235-mt - Thermal Power PlantsSRINIVASA RAO GANTANoch keine Bewertungen
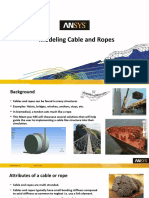
- Modelling Cables and RopesDokument14 SeitenModelling Cables and RopesAjivakkom Vivekanandan50% (2)
- Fan Reverse Engineering ReportDokument7 SeitenFan Reverse Engineering Reportapi-3324787780% (1)
- Study of Double Cage Induction Motors With Different Rotor Bar MaterialsDokument7 SeitenStudy of Double Cage Induction Motors With Different Rotor Bar MaterialsJunaid AhmadNoch keine Bewertungen
- Electrical Room Heater WiringDokument4 SeitenElectrical Room Heater WiringgouravNoch keine Bewertungen
- A Technical Seminar ON Dtsi Technology.: Farhan Mohammed.N (421118114029)Dokument27 SeitenA Technical Seminar ON Dtsi Technology.: Farhan Mohammed.N (421118114029)Gopi GopiNoch keine Bewertungen
- Modeling and Simulation of Friction Stir Welding of Dissimilar Alloys and MaterialsDokument7 SeitenModeling and Simulation of Friction Stir Welding of Dissimilar Alloys and MaterialsEdilberto Murrieta LunaNoch keine Bewertungen
- Handbook Longlok PDFDokument48 SeitenHandbook Longlok PDFharshal161987100% (1)
- Chapter 3-Part 2Dokument95 SeitenChapter 3-Part 2Hervis FantiniNoch keine Bewertungen
- Is 866 1957Dokument7 SeitenIs 866 1957sarath6725Noch keine Bewertungen
- Sprintcut PDFDokument5 SeitenSprintcut PDFpruthiviraj13100% (1)
- Me 8513 MM Lab 2022 OddDokument63 SeitenMe 8513 MM Lab 2022 OddVelan PrintersNoch keine Bewertungen
- Plasma Device and TechnologyDokument27 SeitenPlasma Device and Technologymahmoud EissaNoch keine Bewertungen
- Ansys Software Question Bank For Baja 2014: SL No. Questions AnswersDokument2 SeitenAnsys Software Question Bank For Baja 2014: SL No. Questions AnswerspriyeshdongreNoch keine Bewertungen
- Me 2401 Mechatronics 1-5 Important QuestionsDokument4 SeitenMe 2401 Mechatronics 1-5 Important QuestionsvasanthavananNoch keine Bewertungen
- Dokumentation Energoutil 2015-35370 - enDokument37 SeitenDokumentation Energoutil 2015-35370 - enbrctlnNoch keine Bewertungen
- PATENT - Axial Flux Motor AssemblyDokument13 SeitenPATENT - Axial Flux Motor Assemblyrakeshee2007Noch keine Bewertungen
- Hitachi skd61 PDFDokument12 SeitenHitachi skd61 PDFHieu Nguyen MinhNoch keine Bewertungen
- Magnetic RepulsionDokument22 SeitenMagnetic Repulsionpraving5005Noch keine Bewertungen
- Differential Transformation Method for Mechanical Engineering ProblemsVon EverandDifferential Transformation Method for Mechanical Engineering ProblemsNoch keine Bewertungen
- RobotWare 6 DatasheetDokument4 SeitenRobotWare 6 DatasheetXanti Zabala Da RosaNoch keine Bewertungen
- Operating Instructions - KL4000 V10 enDokument231 SeitenOperating Instructions - KL4000 V10 enXanti Zabala Da RosaNoch keine Bewertungen
- RobotStudio Operation Manual PDFDokument298 SeitenRobotStudio Operation Manual PDFEmanuelNoch keine Bewertungen
- Operating Manual - RobotStudio 2019.2 Rev.Z PDFDokument290 SeitenOperating Manual - RobotStudio 2019.2 Rev.Z PDFXanti Zabala Da RosaNoch keine Bewertungen
- Release Notes RobotStudio 2019-5 PDFDokument44 SeitenRelease Notes RobotStudio 2019-5 PDFXanti Zabala Da RosaNoch keine Bewertungen
- RobotStudio Operation Manual PDFDokument298 SeitenRobotStudio Operation Manual PDFEmanuelNoch keine Bewertungen
- Kawasaki Controller E Series External I-O Manual PDFDokument84 SeitenKawasaki Controller E Series External I-O Manual PDFXanti Zabala Da RosaNoch keine Bewertungen
- Denso Robotic V - BegDokument168 SeitenDenso Robotic V - BegSam eagle goodNoch keine Bewertungen
- Product GuidanceDokument1 SeiteProduct GuidanceXanti Zabala Da RosaNoch keine Bewertungen
- E Series Installation and Connection ManualDokument114 SeitenE Series Installation and Connection ManualXanti Zabala Da RosaNoch keine Bewertungen
- DENSO Manual CastellanoDokument692 SeitenDENSO Manual CastellanoJulianna LizcanoNoch keine Bewertungen
- Ssraen 071 006 - Sra H 01 FD11Dokument30 SeitenSsraen 071 006 - Sra H 01 FD11Eddy AlmeidaNoch keine Bewertungen
- Program Editor User ManualDokument14 SeitenProgram Editor User ManualXanti Zabala Da RosaNoch keine Bewertungen
- Kawasaki Controller E Series External I-O Manual PDFDokument84 SeitenKawasaki Controller E Series External I-O Manual PDFXanti Zabala Da RosaNoch keine Bewertungen
- Flexible Motion "Arm" Robot With 7-Axes: 7-Axes Structure Harsh Production EnvironmentDokument2 SeitenFlexible Motion "Arm" Robot With 7-Axes: 7-Axes Structure Harsh Production EnvironmentXanti Zabala Da RosaNoch keine Bewertungen
- Nachi Robot Catalog 2017Dokument36 SeitenNachi Robot Catalog 2017Xanti Zabala Da RosaNoch keine Bewertungen
- E Series Installation and Connection ManualDokument114 SeitenE Series Installation and Connection ManualXanti Zabala Da RosaNoch keine Bewertungen
- Cleanroom CR7 E 06.2015Dokument2 SeitenCleanroom CR7 E 06.2015Xanti Zabala Da RosaNoch keine Bewertungen
- Nachi Robot Catalog 2008Dokument10 SeitenNachi Robot Catalog 2008Xanti Zabala Da RosaNoch keine Bewertungen
- Nachi Robot Catalog 2008Dokument10 SeitenNachi Robot Catalog 2008Xanti Zabala Da RosaNoch keine Bewertungen
- SRA166 210 01A BrochureDokument2 SeitenSRA166 210 01A BrochureXanti Zabala Da RosaNoch keine Bewertungen
- SRA166 210 BrochureDokument2 SeitenSRA166 210 BrochureXanti Zabala Da RosaNoch keine Bewertungen
- SRA100H-SRA133HL Rev2 BrochureDokument2 SeitenSRA100H-SRA133HL Rev2 BrochureXanti Zabala Da RosaNoch keine Bewertungen
- Nachi Robot Catalog 2012Dokument20 SeitenNachi Robot Catalog 2012Xanti Zabala Da RosaNoch keine Bewertungen
- Servo Weld Guns - CXR TYPE: 2M MTBF 100% BodyshopDokument2 SeitenServo Weld Guns - CXR TYPE: 2M MTBF 100% BodyshopEddie ScarpaNoch keine Bewertungen
- EZ03-02 Standard SpecificationsDokument28 SeitenEZ03-02 Standard SpecificationsXanti Zabala Da RosaNoch keine Bewertungen
- LP 01 AX20 Standard SpecificationsDokument20 SeitenLP 01 AX20 Standard SpecificationsXanti Zabala Da RosaNoch keine Bewertungen
- 500 KG Payload Capacity For Optimal Handling of Large and Heavy LoadsDokument2 Seiten500 KG Payload Capacity For Optimal Handling of Large and Heavy LoadsXanti Zabala Da RosaNoch keine Bewertungen
- LP 01 AX20 Standard SpecificationsDokument20 SeitenLP 01 AX20 Standard SpecificationsXanti Zabala Da RosaNoch keine Bewertungen
- Flexible Motion "Arm" Robot With 7-Axes: 7-Axes Structure Harsh Production EnvironmentDokument2 SeitenFlexible Motion "Arm" Robot With 7-Axes: 7-Axes Structure Harsh Production EnvironmentXanti Zabala Da RosaNoch keine Bewertungen
- Taewoo Kim Et Al. v. Jump TradingDokument44 SeitenTaewoo Kim Et Al. v. Jump TradingCrainsChicagoBusiness100% (1)
- Revised Study Material - Economics ChandigarhDokument159 SeitenRevised Study Material - Economics ChandigarhvishaljalanNoch keine Bewertungen
- MSC 200Dokument18 SeitenMSC 200Amit KumarNoch keine Bewertungen
- Materials Selection in Mechanical Design - EPDF - TipsDokument1 SeiteMaterials Selection in Mechanical Design - EPDF - TipsbannetNoch keine Bewertungen
- Esp-2000 BSDokument6 SeitenEsp-2000 BSByron LopezNoch keine Bewertungen
- 11-Potential Use of Volcanic Pumice As A Construction Materialhossain2004Dokument7 Seiten11-Potential Use of Volcanic Pumice As A Construction Materialhossain2004afzal taiNoch keine Bewertungen
- FoodhallDokument3 SeitenFoodhallswopnilrohatgiNoch keine Bewertungen
- Meyer and Zack KM CycleDokument16 SeitenMeyer and Zack KM Cyclemohdasriomar84Noch keine Bewertungen
- KVM Architecture OverviewDokument15 SeitenKVM Architecture Overviewdattbbk1Noch keine Bewertungen
- Far 2 Quiz 03212024Dokument6 SeitenFar 2 Quiz 03212024red118831Noch keine Bewertungen
- PET Formal Letter SamplesDokument7 SeitenPET Formal Letter SamplesLe Anh ThuNoch keine Bewertungen
- Psi Engines Product Sheet PDFDokument2 SeitenPsi Engines Product Sheet PDFDaniel DelgadoNoch keine Bewertungen
- Chapter 5 - Shear and Diagonal Tension On Beams PDFDokument55 SeitenChapter 5 - Shear and Diagonal Tension On Beams PDFJhe Taguines100% (1)
- Problem SetsDokument69 SeitenProblem SetsAnnagrazia ArgentieriNoch keine Bewertungen
- Aggregate Production PlanningDokument5 SeitenAggregate Production PlanningSarbani SahuNoch keine Bewertungen
- RAMSCRAM-A Flexible RAMJET/SCRAMJET Engine Simulation ProgramDokument4 SeitenRAMSCRAM-A Flexible RAMJET/SCRAMJET Engine Simulation ProgramSamrat JanjanamNoch keine Bewertungen
- Law MCQ 25Dokument3 SeitenLaw MCQ 25nonoNoch keine Bewertungen
- What Is The Effective Method For Dissolution of HDPE and LDPE - PDFDokument12 SeitenWhat Is The Effective Method For Dissolution of HDPE and LDPE - PDFAliNoch keine Bewertungen
- Software Requirements SpecificationDokument9 SeitenSoftware Requirements SpecificationSu-kEm Tech LabNoch keine Bewertungen
- Reverse LogisticsDokument37 SeitenReverse Logisticsblogdogunleashed100% (7)
- Series R: 3 Piece Ball Valves With Integrated Handle DN8 - DN50 Butt Weld, Threaded, Socket Weld and Flanged VersionDokument2 SeitenSeries R: 3 Piece Ball Valves With Integrated Handle DN8 - DN50 Butt Weld, Threaded, Socket Weld and Flanged VersionАртем КосовNoch keine Bewertungen
- Nationalisation of Insurance BusinessDokument12 SeitenNationalisation of Insurance BusinessSanjay Ram Diwakar50% (2)
- AXIOM75 50 25 1B - Rev.6 10.000MHzDokument4 SeitenAXIOM75 50 25 1B - Rev.6 10.000MHzTürkay PektürkNoch keine Bewertungen
- Queen - Hammer To Fall ChordsDokument3 SeitenQueen - Hammer To Fall ChordsDavideContiNoch keine Bewertungen
- Mechanical Vibration and Oscillation in Transmission LinesDokument27 SeitenMechanical Vibration and Oscillation in Transmission LinesChhatrapal SinghNoch keine Bewertungen
- DS WhitePaper Troubleshooting 3DEXPERIENCE ABEND SituationsDokument26 SeitenDS WhitePaper Troubleshooting 3DEXPERIENCE ABEND SituationsSam AntonyNoch keine Bewertungen
- Real Estate (Regulation and Development) Act 2016 (RERA) CompliancesDokument15 SeitenReal Estate (Regulation and Development) Act 2016 (RERA) CompliancesM S PrasadNoch keine Bewertungen
- Syllabus Math 305Dokument4 SeitenSyllabus Math 305Nataly SusanaNoch keine Bewertungen
- 1 s2.0 S0955221920305689 MainDokument19 Seiten1 s2.0 S0955221920305689 MainJoaoNoch keine Bewertungen
- MBF100 Subject OutlineDokument2 SeitenMBF100 Subject OutlineMARUTI JEWELSNoch keine Bewertungen