Das könnte Ihnen auch gefallen
- Emm3812 - Static and Dynamic BalancingDokument7 SeitenEmm3812 - Static and Dynamic Balancingsyamil100% (3)
- The Handbook of Market EsotericaDokument104 SeitenThe Handbook of Market EsotericaLuis100% (4)
- Plutonium Nitricum M R7C8Dokument4 SeitenPlutonium Nitricum M R7C8nitkolNoch keine Bewertungen
- Thesis 1Dokument2 SeitenThesis 1Sarwer Hussain FaisalNoch keine Bewertungen
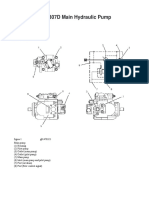
- Cat 307D Main Pump OperationDokument3 SeitenCat 307D Main Pump Operationkahandawala100% (1)
- Mechanis Quizbee in Math and ScienceDokument4 SeitenMechanis Quizbee in Math and ScienceChristine De San Jose80% (5)
- Costo de Energia Paso A Paso en AmputadosDokument6 SeitenCosto de Energia Paso A Paso en AmputadosJorge Eduardo Jiménez SimpsonsNoch keine Bewertungen
- Biomechanical Conceptual Design of A Passive Transfemoral ProsthesisDokument4 SeitenBiomechanical Conceptual Design of A Passive Transfemoral ProsthesisOmar LSNoch keine Bewertungen
- Design of A Passive Gait-Based Ankle-Foot Exoskeleton With Self-Adaptive CapabilityDokument11 SeitenDesign of A Passive Gait-Based Ankle-Foot Exoskeleton With Self-Adaptive CapabilityRomán Bonilla SánchezNoch keine Bewertungen
- EnergyDokument13 SeitenEnergyFernando BarónNoch keine Bewertungen
- LiteratureDokument8 SeitenLiteraturebetelhemterefe wondimagenihuNoch keine Bewertungen
- Footstep Power Generation: MET's Institute of Engineering, Department of Mechanical EngineeringDokument7 SeitenFootstep Power Generation: MET's Institute of Engineering, Department of Mechanical EngineeringApurv GaikwadNoch keine Bewertungen
- K1501047580 With Cover Page v2Dokument7 SeitenK1501047580 With Cover Page v2John Carlo CarilloNoch keine Bewertungen
- Exoskeleton Design For LegDokument8 SeitenExoskeleton Design For LegGamini SureshNoch keine Bewertungen
- Energies 1Dokument7 SeitenEnergies 1Felipe FeitosaNoch keine Bewertungen
- Protesis 13Dokument9 SeitenProtesis 13ana márquezNoch keine Bewertungen
- Energy Harvesting Using Piezoelectric MaterialsDokument11 SeitenEnergy Harvesting Using Piezoelectric Materialsانجینئر بلاول شمیرNoch keine Bewertungen
- ReportDokument14 SeitenReportNoushz channelNoch keine Bewertungen
- Design and Control of A Pneumatically Actuated Transtibial ProsthesisDokument10 SeitenDesign and Control of A Pneumatically Actuated Transtibial ProsthesisNacho Castro IzquierdoNoch keine Bewertungen
- A New Controlling Parameter in Design of Above Knee ProsthesisDokument8 SeitenA New Controlling Parameter in Design of Above Knee ProsthesismohsinslatchNoch keine Bewertungen
- Protesis 14Dokument6 SeitenProtesis 14ana márquezNoch keine Bewertungen
- Anas Mansoor 14phee103Dokument97 SeitenAnas Mansoor 14phee103ANAS MANSOORNoch keine Bewertungen
- Micromachines 13 00571 v2Dokument25 SeitenMicromachines 13 00571 v2Hieu DangNoch keine Bewertungen
- Generation of Electricity by Combining Gravitational Pull and Harvesting Energy by Artificial LightsDokument9 SeitenGeneration of Electricity by Combining Gravitational Pull and Harvesting Energy by Artificial LightsIJRASETPublicationsNoch keine Bewertungen
- Energy Harvesting From Passive Human PowerDokument40 SeitenEnergy Harvesting From Passive Human PowerAvs Sai BabuNoch keine Bewertungen
- Steptricity: A Physics Project Report: Harnessing Energy, Step by Step..Dokument20 SeitenSteptricity: A Physics Project Report: Harnessing Energy, Step by Step..Ria MirchandaniNoch keine Bewertungen
- Flywheel Energy FormulaDokument9 SeitenFlywheel Energy Formulaalexbusinesss100% (1)
- Letter: Reducing The Energy Cost of Human Walking Using An Unpowered ExoskeletonDokument15 SeitenLetter: Reducing The Energy Cost of Human Walking Using An Unpowered ExoskeletonLor JoeyNoch keine Bewertungen
- Protesis 1Dokument6 SeitenProtesis 1ana márquezNoch keine Bewertungen
- Final Na Final Na Gyud Niii TTDokument13 SeitenFinal Na Final Na Gyud Niii TTpablo sajelanNoch keine Bewertungen
- Design and Analysis of A Mechanical Device To Harvest Energy From Human Footstep MotionDokument6 SeitenDesign and Analysis of A Mechanical Device To Harvest Energy From Human Footstep MotionAsmae BerradaNoch keine Bewertungen
- Biomimetics 07 00234Dokument14 SeitenBiomimetics 07 00234h4v66tmw7jNoch keine Bewertungen
- Portable Power Bank Charged by Piezoelectric Disc For CyclingDokument17 SeitenPortable Power Bank Charged by Piezoelectric Disc For CyclingshairaNoch keine Bewertungen
- Energetics of Actively Powered Locomotion Using The Simplest Walking ModelDokument8 SeitenEnergetics of Actively Powered Locomotion Using The Simplest Walking ModelAndrew Harrison LewisNoch keine Bewertungen
- Synopsis Footstep Power GeneratorDokument9 SeitenSynopsis Footstep Power GeneratorAnujeet SarkarNoch keine Bewertungen
- Elexo PDFDokument22 SeitenElexo PDFPrince KumarNoch keine Bewertungen
- A Dynamical Model of Locomotion in Spastic Hemiplegic Cerebral Palsy: in Uence of Walking SpeedDokument13 SeitenA Dynamical Model of Locomotion in Spastic Hemiplegic Cerebral Palsy: in Uence of Walking Speedenamatic94Noch keine Bewertungen
- Power Generating Foot Bridge Using Wind Energy and FootsepsDokument20 SeitenPower Generating Foot Bridge Using Wind Energy and FootsepsBianca LorelleNoch keine Bewertungen
- Carney (2021)Dokument12 SeitenCarney (2021)Fernanda LealNoch keine Bewertungen
- Chapter 1 Pedal Type GeneratorDokument8 SeitenChapter 1 Pedal Type GeneratorAdrian RapsingNoch keine Bewertungen
- Project Phase I Main ReportDokument13 SeitenProject Phase I Main ReportPavan Gummani0% (1)
- It Pays To Have A Spring in Your StepDokument19 SeitenIt Pays To Have A Spring in Your StepLuis AltunaNoch keine Bewertungen
- Project Report: RoboticsDokument8 SeitenProject Report: Roboticsharpreet singh luthraNoch keine Bewertungen
- Richter 2014Dokument13 SeitenRichter 2014muhamad otongNoch keine Bewertungen
- Powered Sit-to-Stand and Assistive Stand-to-Sit Framework For A Powered Transfemoral ProsthesisDokument7 SeitenPowered Sit-to-Stand and Assistive Stand-to-Sit Framework For A Powered Transfemoral ProsthesisJuan Carlos Ladino VegaNoch keine Bewertungen
- A Brief Review On Human-Powered Lower-LimbDokument8 SeitenA Brief Review On Human-Powered Lower-LimbAkim KbNoch keine Bewertungen
- Foot Step Power Generation SynopsisDokument14 SeitenFoot Step Power Generation SynopsisTARUN SINGH0% (1)
- 1 s2.0 S0306261917318482 Main PDFDokument10 Seiten1 s2.0 S0306261917318482 Main PDFMiguel AngelNoch keine Bewertungen
- A Piezoelectric Energy Harvester For Rotary Motion Applications: Design and ExperimentsDokument8 SeitenA Piezoelectric Energy Harvester For Rotary Motion Applications: Design and ExperimentsSagar MohanNoch keine Bewertungen
- Golap 2014 PDFDokument6 SeitenGolap 2014 PDFgolapkantideyNoch keine Bewertungen
- Biomechanical Energy Harvesting From Human Motion: Theory, State of The Art, Design Guidelines, and Future DirectionsDokument13 SeitenBiomechanical Energy Harvesting From Human Motion: Theory, State of The Art, Design Guidelines, and Future DirectionsOmar MohamedNoch keine Bewertungen
- Micromachines 2544656 Peer Review v1Dokument21 SeitenMicromachines 2544656 Peer Review v1Parvin AkterNoch keine Bewertungen
- Lifting of Water by Using Simple Pendulum With Solar EnergyDokument6 SeitenLifting of Water by Using Simple Pendulum With Solar EnergyVeljko MilkovicNoch keine Bewertungen
- Torque Analysis of The Lower Limb Exoskeleton Robot Design: N. Latif A. Shaari - Ida S. MD Isa and Tan Chee JunDokument10 SeitenTorque Analysis of The Lower Limb Exoskeleton Robot Design: N. Latif A. Shaari - Ida S. MD Isa and Tan Chee JunkameenaNoch keine Bewertungen
- Power Generation Literature StudyDokument17 SeitenPower Generation Literature StudyShashank ManoharNoch keine Bewertungen
- Fabrication of Bicycle Driven Water Pumping and Power Generation SystemDokument6 SeitenFabrication of Bicycle Driven Water Pumping and Power Generation SystemTemesgen Walelign AyeleNoch keine Bewertungen
- 70% Stair Case Power GenerationDokument63 Seiten70% Stair Case Power GenerationSource Code TechnologyNoch keine Bewertungen
- Energy Generation Using Rocking ChairDokument11 SeitenEnergy Generation Using Rocking ChairEditor IJTSRDNoch keine Bewertungen
- PR20211003 - Prathmesh KakdeDokument5 SeitenPR20211003 - Prathmesh KakdePrathmesh KakadeNoch keine Bewertungen
- Two-Degree Adjustable Exoskeleton For Assistance of The Human Arm Using A Mechanical System of Fast Assembly and UpgradabilityDokument15 SeitenTwo-Degree Adjustable Exoskeleton For Assistance of The Human Arm Using A Mechanical System of Fast Assembly and UpgradabilityTYTNoch keine Bewertungen
- Unidirectional Variable Stiffness Hydraulic Actuator For Load Carrying Knee ExoskeletonDokument12 SeitenUnidirectional Variable Stiffness Hydraulic Actuator For Load Carrying Knee ExoskeletonHNoch keine Bewertungen
- Mechanical Design of Piezoelectric Energy Harvesters: Generating Electricity from Human WalkingVon EverandMechanical Design of Piezoelectric Energy Harvesters: Generating Electricity from Human WalkingNoch keine Bewertungen
- Solar Chimney Power Plant Generating TechnologyVon EverandSolar Chimney Power Plant Generating TechnologyBewertung: 5 von 5 Sternen5/5 (2)
- Design and Operation of Human Locomotion SystemsVon EverandDesign and Operation of Human Locomotion SystemsMarco CecarelliNoch keine Bewertungen
- Daily Planner Template 41Dokument10 SeitenDaily Planner Template 41syamil100% (2)
- Bollinger Band RulesDokument6 SeitenBollinger Band RulessyamilNoch keine Bewertungen
- FCBGADokument3 SeitenFCBGAsyamilNoch keine Bewertungen
- 2013 PhamDokument82 Seiten2013 PhamWaseem TajNoch keine Bewertungen
- Chapter 8 Continuous SystemDokument128 SeitenChapter 8 Continuous SystemsyamilNoch keine Bewertungen
- Simulation and Analysis BarDokument3 SeitenSimulation and Analysis BarsyamilNoch keine Bewertungen
- Occupational Safety and Health Prohibition of Use of Substance Order 1999Dokument2 SeitenOccupational Safety and Health Prohibition of Use of Substance Order 1999syamilNoch keine Bewertungen
- Mcckonkey SolutionDokument63 SeitenMcckonkey SolutionHajiasifAli100% (1)
- S41/42 + S62 + S86 + S110 Plate Heat ExchangerDokument2 SeitenS41/42 + S62 + S86 + S110 Plate Heat ExchangerTrần Khắc ĐộNoch keine Bewertungen
- 2D& 3D-Kate Susannah - Lindsay Sorin and Michelle Maranto-Option 2 - 22.03.23Dokument11 Seiten2D& 3D-Kate Susannah - Lindsay Sorin and Michelle Maranto-Option 2 - 22.03.23Miliausha KarimNoch keine Bewertungen
- 2014 Aprilia SR MAX 300 (Service Manual)Dokument335 Seiten2014 Aprilia SR MAX 300 (Service Manual)alexander ortizNoch keine Bewertungen
- UT Dallas Syllabus For Phys3341.001.11f Taught by Mark Lee (mxl101000)Dokument5 SeitenUT Dallas Syllabus For Phys3341.001.11f Taught by Mark Lee (mxl101000)UT Dallas Provost's Technology GroupNoch keine Bewertungen
- Electromagnetic RadiationDokument22 SeitenElectromagnetic RadiationSelva Kumar0% (1)
- Air Brakes Module 1Dokument49 SeitenAir Brakes Module 1emreorakNoch keine Bewertungen
- 5 Feeder Protection & Relay CoordinationDokument51 Seiten5 Feeder Protection & Relay CoordinationSatya VasuNoch keine Bewertungen
- Shell VOLUTA C 400: Neat Quenching OilDokument2 SeitenShell VOLUTA C 400: Neat Quenching OilalmasNoch keine Bewertungen
- CATERPILAR3516 1550-2200 BHPDokument6 SeitenCATERPILAR3516 1550-2200 BHPNadia AnandaNoch keine Bewertungen
- MA 40 - Premium Quality Stationary Gas Engine OilDokument2 SeitenMA 40 - Premium Quality Stationary Gas Engine OilRaden ArdyNoch keine Bewertungen
- Cleaning of Pipes by Gas Discharge Back PuffingDokument1 SeiteCleaning of Pipes by Gas Discharge Back PuffingVamsi MahantiNoch keine Bewertungen
- Solar Panel Thesis PhilippinesDokument6 SeitenSolar Panel Thesis Philippinesmelanierussellvirginiabeach100% (2)
- Fluid MechanicsDokument35 SeitenFluid MechanicsJohn Ely Collado Bantog0% (1)
- Introduction To MicroWavesDokument5 SeitenIntroduction To MicroWavesKrish_666Noch keine Bewertungen
- Mag Drive PumpsDokument5 SeitenMag Drive PumpsakkineniNoch keine Bewertungen
- Plumbing - HVAC August 2010Dokument48 SeitenPlumbing - HVAC August 2010aurelian177100% (1)
- Catalogo Das Bomba Danfoss s90 100.Dokument240 SeitenCatalogo Das Bomba Danfoss s90 100.Agrocampo PeçasNoch keine Bewertungen
- The Consumers Guideto Choosinga Heat PumpDokument11 SeitenThe Consumers Guideto Choosinga Heat Pumpmishka123Noch keine Bewertungen
- Voltage DropDokument18 SeitenVoltage DropVaughn GaneloNoch keine Bewertungen
- Mic Electronics Research ReportDokument17 SeitenMic Electronics Research ReportSudipta BoseNoch keine Bewertungen
- Portal Frame ConstructionDokument2 SeitenPortal Frame Constructionriz2010Noch keine Bewertungen
- Presentation Mahmud Totonji DarwishDokument13 SeitenPresentation Mahmud Totonji DarwishMahmoud ToutounjyNoch keine Bewertungen
- MF1547Electric Panel PDFDokument24 SeitenMF1547Electric Panel PDFAhmad Ali NursahidinNoch keine Bewertungen
- The Bearing Capacity Evaluations of A Spread Footing On Single Thick Stratum or Two-Layered Cohesive SoilsDokument19 SeitenThe Bearing Capacity Evaluations of A Spread Footing On Single Thick Stratum or Two-Layered Cohesive SoilsJohnclaude ChamandiNoch keine Bewertungen
- Acetanilide Structure andDokument5 SeitenAcetanilide Structure andjdNoch keine Bewertungen
- PM OverviewDokument25 SeitenPM Overviewmohitamitabh20Noch keine Bewertungen
- TGEL BatteryDokument4 SeitenTGEL BatteryharishwarreddyNoch keine Bewertungen