Das könnte Ihnen auch gefallen
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Common Coordinate TransformationsDokument20 SeitenCommon Coordinate TransformationsParveen Sahni ErNoch keine Bewertungen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Sending Data From The Arduino To MATLABDokument1 SeiteSending Data From The Arduino To MATLABParveen Sahni ErNoch keine Bewertungen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Details of Center & How To Reach Meditation CentreDokument3 SeitenDetails of Center & How To Reach Meditation CentreParveen Sahni ErNoch keine Bewertungen
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Root Locus AssignmentsDokument1 SeiteRoot Locus AssignmentsParveen Sahni ErNoch keine Bewertungen
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Term Project-I Mechanics of CompositesDokument2 SeitenTerm Project-I Mechanics of CompositesParveen Sahni ErNoch keine Bewertungen
- Request Letter TemplateDokument1 SeiteRequest Letter TemplateParveen Sahni ErNoch keine Bewertungen
- Effective Properties of Thermo-Electro-Mechanically Coupled Piezoelectric Fiber Reinforced CompositesDokument31 SeitenEffective Properties of Thermo-Electro-Mechanically Coupled Piezoelectric Fiber Reinforced CompositesParveen Sahni ErNoch keine Bewertungen
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- Physica E: Low-Dimensional Systems and Nanostructures: Yarong Zhou, Xu Yang, Dongmei Pan, Binglei WangDokument11 SeitenPhysica E: Low-Dimensional Systems and Nanostructures: Yarong Zhou, Xu Yang, Dongmei Pan, Binglei WangParveen Sahni ErNoch keine Bewertungen
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- XL T ZoologyDokument2 SeitenXL T ZoologyParveen Sahni ErNoch keine Bewertungen
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- DH ExamplesDokument35 SeitenDH ExamplesParveen Sahni ErNoch keine Bewertungen
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Final Offer LetterDokument2 SeitenFinal Offer LetterParveen Sahni ErNoch keine Bewertungen
- Student Registration CardDokument1 SeiteStudent Registration CardParveen Sahni ErNoch keine Bewertungen
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Er 2Dokument11 SeitenEr 2Parveen Sahni ErNoch keine Bewertungen
- DH Representation in Kinematic ChainDokument29 SeitenDH Representation in Kinematic ChainParveen Sahni ErNoch keine Bewertungen
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- Modelling With MAPLE (A Tutorial Covering Basics) : ESW Lab 2014Dokument27 SeitenModelling With MAPLE (A Tutorial Covering Basics) : ESW Lab 2014Parveen Sahni ErNoch keine Bewertungen
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- Common Coordinate TransformationsDokument54 SeitenCommon Coordinate TransformationsParveen Sahni ErNoch keine Bewertungen
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- Modern Physics Problem Set 14: Page 1 of 3Dokument3 SeitenModern Physics Problem Set 14: Page 1 of 3Muzamil ShahNoch keine Bewertungen
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- Schaum's Outline of Thermodynamics With Chemical ApplicationsDokument370 SeitenSchaum's Outline of Thermodynamics With Chemical ApplicationsMuhammad Usman100% (6)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Worksheet For Trapezoidal Channel - 1: Project DescriptionDokument2 SeitenWorksheet For Trapezoidal Channel - 1: Project DescriptionMax FerrolNoch keine Bewertungen
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
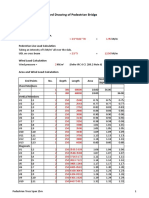
- Preparation of Standard Drawing of Pedestrian Bridge Span: 60 M Load CalculationsDokument19 SeitenPreparation of Standard Drawing of Pedestrian Bridge Span: 60 M Load CalculationsRoshan KejariwalNoch keine Bewertungen
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Machine Tool StructuresDokument10 SeitenMachine Tool StructuresLowry GuettaNoch keine Bewertungen
- 6 Waves SDokument52 Seiten6 Waves SRuddyMartiniNoch keine Bewertungen
- Caproni Hydraulic Cartridge Valves-EnDokument60 SeitenCaproni Hydraulic Cartridge Valves-EnGeorgi MirchevNoch keine Bewertungen
- Pitot TubesDokument12 SeitenPitot TubesOscar CruzNoch keine Bewertungen
- KCET 2018 Physics Paper With AnswerDokument6 SeitenKCET 2018 Physics Paper With AnswerNikhilNoch keine Bewertungen
- Euler EquationDokument10 SeitenEuler Equationjllama20004321Noch keine Bewertungen
- Chapter 12Dokument59 SeitenChapter 12Martunis TomyNoch keine Bewertungen
- EN1990&EN1997 1 General RulesDokument54 SeitenEN1990&EN1997 1 General Rulesg1g1ngNoch keine Bewertungen
- Predicting The Effective Flange Width of A CLT Slab in Timber Composite BeamsDokument18 SeitenPredicting The Effective Flange Width of A CLT Slab in Timber Composite BeamsBambus Promete100% (1)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- AERODYN2 - Part 7 - Climbing FlightDokument32 SeitenAERODYN2 - Part 7 - Climbing FlightSecretNoch keine Bewertungen
- John Archibald WheelerDokument10 SeitenJohn Archibald WheelerivygoldNoch keine Bewertungen
- Physical Pendulum: ExperimentDokument6 SeitenPhysical Pendulum: ExperimentJimNoch keine Bewertungen
- Descriptions of Fluid FlowsDokument2 SeitenDescriptions of Fluid FlowsdarshanNoch keine Bewertungen
- Oxo AQA16 P805 ls01 XxaannDokument5 SeitenOxo AQA16 P805 ls01 XxaannAdam ChiangNoch keine Bewertungen
- Final ProjectDokument4 SeitenFinal ProjectChacho BacoaNoch keine Bewertungen
- Whirling of Shaft Apparatus: Aim: DescriptionDokument2 SeitenWhirling of Shaft Apparatus: Aim: Descriptionമാളിയേക്കൽചിതലൻ തോമസ് റോയ്Noch keine Bewertungen
- CIVE1129 - Lecture Notes - Consolidation PDFDokument23 SeitenCIVE1129 - Lecture Notes - Consolidation PDFLee Tin YanNoch keine Bewertungen
- 3.0 Material Properties of Metals and FailureDokument29 Seiten3.0 Material Properties of Metals and FailureHasmitthaNoch keine Bewertungen
- SACD (RCDC) - Release Note - 23.00.00Dokument17 SeitenSACD (RCDC) - Release Note - 23.00.00Abel MulugetaNoch keine Bewertungen
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Curl-Noise For Procedural Fluid FlowDokument4 SeitenCurl-Noise For Procedural Fluid FlowArthur Gonze MachadoNoch keine Bewertungen
- Inertial Measurement Units II: Gordon Wetzstein! Stanford University!Dokument37 SeitenInertial Measurement Units II: Gordon Wetzstein! Stanford University!mNoch keine Bewertungen
- Residential Structural Design Design of Slab 1702058853Dokument30 SeitenResidential Structural Design Design of Slab 1702058853Gys AnamaliNoch keine Bewertungen
- (Curtis H., Allan P.) A Finite Element Study of Boulder Interaction With SpudcansDokument6 Seiten(Curtis H., Allan P.) A Finite Element Study of Boulder Interaction With Spudcansfle92Noch keine Bewertungen
- Physical Chemistry - Kinetic T3kDokument9 SeitenPhysical Chemistry - Kinetic T3ksolhhNoch keine Bewertungen
- Jss 2 Basic Technology JSS 2 Third Term Examination - Marvel LearnDokument1 SeiteJss 2 Basic Technology JSS 2 Third Term Examination - Marvel LearnTriple Jay COC100% (1)
- Strcteng200 S1 2022Dokument7 SeitenStrcteng200 S1 2022ChengNoch keine Bewertungen