Das könnte Ihnen auch gefallen
- US Navy Course NAVEDTRA 14338 QuartermasterDokument486 SeitenUS Navy Course NAVEDTRA 14338 QuartermasterAlex100% (1)
- COLREGS - Ship Collission RegulationsDokument229 SeitenCOLREGS - Ship Collission Regulationschrisp22040100% (1)
- Ship ControlDokument15 SeitenShip ControlAlexNoch keine Bewertungen
- FAA-H-8083-17 Parachute Rigger HandbookDokument344 SeitenFAA-H-8083-17 Parachute Rigger HandbookDavid Russo100% (4)
- TM 10-1670-268-20&P (T.O. 13C7-52-22) - Plataforma Tipo VDokument228 SeitenTM 10-1670-268-20&P (T.O. 13C7-52-22) - Plataforma Tipo VAlex100% (1)
- Airforce ManualDokument38 SeitenAirforce Manualkgb_261Noch keine Bewertungen
- FM 4-20.116 (FM 10-516) To 13C7!1!13 - Reference Data For Airdrop Plataform LoadsDokument182 SeitenFM 4-20.116 (FM 10-516) To 13C7!1!13 - Reference Data For Airdrop Plataform LoadsAlex100% (1)
- FM 3-21.71 Pathfinder OperationsDokument181 SeitenFM 3-21.71 Pathfinder OperationsJared A. Lang100% (3)
- FM 10-500-3 - Airdrop Derigging and Recovery ProceduresDokument48 SeitenFM 10-500-3 - Airdrop Derigging and Recovery ProceduresAlex100% (1)
- Fm4!20!102 Rigging Airdrop PlatformsDokument158 SeitenFm4!20!102 Rigging Airdrop PlatformsAlexNoch keine Bewertungen
- Static Line Parachuting Techniques and Training - FM 3-21-220Dokument436 SeitenStatic Line Parachuting Techniques and Training - FM 3-21-220USMedicPA100% (2)
- FM 31-19 - Military Free Fall ParachutingDokument224 SeitenFM 31-19 - Military Free Fall ParachutingAlex100% (2)
- FAA-H-8083-25 - Pilot's Handbook-Of-Aeronautical Knowledge - Edition 2003Dokument353 SeitenFAA-H-8083-25 - Pilot's Handbook-Of-Aeronautical Knowledge - Edition 2003AlexNoch keine Bewertungen
- FM 10-500-3 - Airdrop Derigging and Recovery ProceduresDokument48 SeitenFM 10-500-3 - Airdrop Derigging and Recovery ProceduresAlex100% (1)
- Fm4!20!102 Rigging Airdrop PlatformsDokument158 SeitenFm4!20!102 Rigging Airdrop PlatformsAlexNoch keine Bewertungen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Other Art Forms: Industrial Art (Raw Materials Forming SignificantDokument10 SeitenOther Art Forms: Industrial Art (Raw Materials Forming Significantjohn mark dionidoNoch keine Bewertungen
- Guide To Smoke Extraction in BuildingsDokument76 SeitenGuide To Smoke Extraction in BuildingsKc Hon100% (2)
- 01-HUAWEI Storage Product Sales Specialist Training V4.3 PDFDokument74 Seiten01-HUAWEI Storage Product Sales Specialist Training V4.3 PDFSaju MohanNoch keine Bewertungen
- 5G Testing Training Certification TELCOMA GlobalDokument199 Seiten5G Testing Training Certification TELCOMA GlobalTELCOMA GlobalNoch keine Bewertungen
- Trane Product GuideDokument249 SeitenTrane Product GuideAnju Kl75% (4)
- Weblogic Portal JSF WhitepaperDokument152 SeitenWeblogic Portal JSF WhitepaperwangpchomebuyNoch keine Bewertungen
- QB Som He306 2015 2016Dokument23 SeitenQB Som He306 2015 2016etayhailuNoch keine Bewertungen
- Embedded Pentium Processor Family: December 1998Dokument330 SeitenEmbedded Pentium Processor Family: December 1998MarioKunditNoch keine Bewertungen
- Damiano Bertoli: Continuous Moment, Hot August Knife - by Jason BealeDokument3 SeitenDamiano Bertoli: Continuous Moment, Hot August Knife - by Jason BealeJason BealeNoch keine Bewertungen
- Software EngineeringDokument27 SeitenSoftware EngineeringAnurag KumarNoch keine Bewertungen
- User Manual Zosi ZND311 SeriesDokument12 SeitenUser Manual Zosi ZND311 SeriesRobert Smith100% (1)
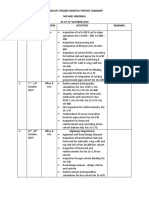
- Graduate Trainee Monthly Report SummaryDokument2 SeitenGraduate Trainee Monthly Report Summarymichael100% (1)
- CiscoDataCenterCertificatione Guide 2017Dokument40 SeitenCiscoDataCenterCertificatione Guide 2017Fayyaz AhmedNoch keine Bewertungen
- New Text DocumentDokument2 SeitenNew Text DocumentNaj Kriztopher NoicnamaracNoch keine Bewertungen
- System Product Catalog: Commercial VRF HVAC Systems Water CooledDokument25 SeitenSystem Product Catalog: Commercial VRF HVAC Systems Water CooledHeber de LunaNoch keine Bewertungen
- Claremont COURIER 4-22-16Dokument32 SeitenClaremont COURIER 4-22-16Peter WeinbergerNoch keine Bewertungen
- Controller SMGDokument696 SeitenController SMGd0re1Noch keine Bewertungen
- New Server BuildDokument26 SeitenNew Server BuildImran RentiaNoch keine Bewertungen
- NCHRP W35-ADokument152 SeitenNCHRP W35-AJobz Pacleb100% (1)
- Seminar Presentation On Cable Stayed BridgeDokument26 SeitenSeminar Presentation On Cable Stayed BridgeSijan ShresthaNoch keine Bewertungen
- Final Synopsis (Thesis)Dokument8 SeitenFinal Synopsis (Thesis)masood khanNoch keine Bewertungen
- Emlab: Installation GuideDokument64 SeitenEmlab: Installation GuidekgskgmNoch keine Bewertungen
- VLSI TimingDokument23 SeitenVLSI TimingAhmed ZЗzЗNoch keine Bewertungen
- Madrid GuideDokument42 SeitenMadrid Guidefarhad1920Noch keine Bewertungen
- Set Up An Encrypted NAS On Odroid-C2 or Rasbperry 3 With OpenMediaVaultDokument18 SeitenSet Up An Encrypted NAS On Odroid-C2 or Rasbperry 3 With OpenMediaVaultrsaNoch keine Bewertungen
- Microsoft Online Services Global Criminal Compliance HandbookDokument22 SeitenMicrosoft Online Services Global Criminal Compliance Handbookesq21Noch keine Bewertungen
- Implementation of CAN Bus in An Autonomous All-Terrain VehicleDokument14 SeitenImplementation of CAN Bus in An Autonomous All-Terrain VehiclePradeep CheekatlaNoch keine Bewertungen
- Design Proforma AmdDokument5 SeitenDesign Proforma AmdsantkabirNoch keine Bewertungen
- Civil Rate Analysis 0 72-73 Kathmandu To Be UpdatedDokument697 SeitenCivil Rate Analysis 0 72-73 Kathmandu To Be UpdatedAnonymous 3fQZqsGIu79% (62)
- Penang07 - CheongfattzeDokument14 SeitenPenang07 - Cheongfattzemohd qistiNoch keine Bewertungen