Das könnte Ihnen auch gefallen
- Model of Tuned Liquid Damper For Suppressing Pitching Motions of StructuresDokument12 SeitenModel of Tuned Liquid Damper For Suppressing Pitching Motions of StructuresAlejandro OspinaNoch keine Bewertungen
- Tuned Liquid Damper (TLD) For Suppressing The Dynamic Response of The StructureDokument16 SeitenTuned Liquid Damper (TLD) For Suppressing The Dynamic Response of The StructureMeera BeheraNoch keine Bewertungen
- Seismic Response Mitigation of 50 Storied Building Using Passive Control Devices: A Comparative StudyDokument7 SeitenSeismic Response Mitigation of 50 Storied Building Using Passive Control Devices: A Comparative Studysuresh kumarNoch keine Bewertungen
- PIV Measurements of Flow Over A Riblet SurfaceDokument8 SeitenPIV Measurements of Flow Over A Riblet Surfacemuka osmanNoch keine Bewertungen
- 1 s2.0 014102969592643M MainDokument7 Seiten1 s2.0 014102969592643M Mainyusep ramdaniNoch keine Bewertungen
- 2023 Coupled Numerical Simulation of Liquid Sloshing Dampers and Wind-Structure Simulation ModelDokument19 Seiten2023 Coupled Numerical Simulation of Liquid Sloshing Dampers and Wind-Structure Simulation ModelTuong BuiNoch keine Bewertungen
- Structural Design Tall Build - 2022 - Pandey - A Tuned Liquid Mass Damper Implemented in A Deep Liquid Storage Tank ForDokument22 SeitenStructural Design Tall Build - 2022 - Pandey - A Tuned Liquid Mass Damper Implemented in A Deep Liquid Storage Tank Forruining.chengNoch keine Bewertungen
- Investigation of Polarization and Depolarization Current For Evaluation of Moisture in Oil-Pressboard InsulationDokument4 SeitenInvestigation of Polarization and Depolarization Current For Evaluation of Moisture in Oil-Pressboard InsulationDeepu MishraNoch keine Bewertungen
- One Degree of Freedom Resonance Wave Energy ConvertorDokument11 SeitenOne Degree of Freedom Resonance Wave Energy ConvertorMr PolashNoch keine Bewertungen
- 1 s2.0 S0889974622001451 MainDokument13 Seiten1 s2.0 S0889974622001451 MainRIGOBERTO NAVA GONZALEZNoch keine Bewertungen
- Effective Control of Response of A Reinforced Concrete Building Under Seismic Loads Using Tuned Liquid DamperDokument15 SeitenEffective Control of Response of A Reinforced Concrete Building Under Seismic Loads Using Tuned Liquid DamperVinit KabadiNoch keine Bewertungen
- 2000 - MMTB - Melt Flow Control in A Multistrand Tundish Using A Turbulence InhibitorDokument11 Seiten2000 - MMTB - Melt Flow Control in A Multistrand Tundish Using A Turbulence InhibitorAntariksh ThesisNoch keine Bewertungen
- Coastal Engineering: Kyung-Duck Suh, Chang-Hwan Ji, Bum Hyoung KimDokument8 SeitenCoastal Engineering: Kyung-Duck Suh, Chang-Hwan Ji, Bum Hyoung KimSaldanelaNoch keine Bewertungen
- Analisis Experimental TLDDokument6 SeitenAnalisis Experimental TLDAlberto CornejoNoch keine Bewertungen
- Pierella 2022 J. Phys. Conf. Ser. 2362 012030Dokument13 SeitenPierella 2022 J. Phys. Conf. Ser. 2362 012030rubesh2316Noch keine Bewertungen
- Dynamic Analysis of Submarine Cable During The Process of Laying Back To The SeabedDokument10 SeitenDynamic Analysis of Submarine Cable During The Process of Laying Back To The SeabedIbinabo ImabiboNoch keine Bewertungen
- Multi tuned liquid dampers reduce structure vibrationDokument16 SeitenMulti tuned liquid dampers reduce structure vibrationanon_427517856Noch keine Bewertungen
- 1 s2.0 S2214157X21005475 MainDokument11 Seiten1 s2.0 S2214157X21005475 Mainduraid ahmadNoch keine Bewertungen
- 2021A Metamodeling With CFD Method For Hydrodynamic Optimisations of Deflectors On A Multi-Wing Trawl DoorDokument14 Seiten2021A Metamodeling With CFD Method For Hydrodynamic Optimisations of Deflectors On A Multi-Wing Trawl Door王刚Noch keine Bewertungen
- Study of A Tank-Pipe Damper System For SDokument10 SeitenStudy of A Tank-Pipe Damper System For SkurniawanandreasNoch keine Bewertungen
- Overview of Tuned Liquid Dampers and Possible Ways of Oscillation Damping Properties ImprovementDokument6 SeitenOverview of Tuned Liquid Dampers and Possible Ways of Oscillation Damping Properties Improvementmostafa shahrabiNoch keine Bewertungen
- Behaviour of Off-Shore Structures: Proceedings of The Third International ConferenceDokument17 SeitenBehaviour of Off-Shore Structures: Proceedings of The Third International ConferenceKatherine FoxNoch keine Bewertungen
- Qian 2006Dokument8 SeitenQian 2006Sarah SimõesNoch keine Bewertungen
- Underwater Shock Response Analysis of A Floating VDokument8 SeitenUnderwater Shock Response Analysis of A Floating VgeppolaNoch keine Bewertungen
- 7. Dielectric Constant CO ModifiedDokument7 Seiten7. Dielectric Constant CO ModifiedZSxdcdNoch keine Bewertungen
- Numerical simulation of interference effects for high-speed catamaransDokument17 SeitenNumerical simulation of interference effects for high-speed catamaransAnant AjithkumarNoch keine Bewertungen
- Ocean Engineering: Wen-Huai Tsao, Wei-Shien Hwang TDokument10 SeitenOcean Engineering: Wen-Huai Tsao, Wei-Shien Hwang T邱俊祥Noch keine Bewertungen
- 10TPC 179firoozDokument1 Seite10TPC 179firoozwargajaya79Noch keine Bewertungen
- 1 s2.0 S0921883122000486 MainDokument15 Seiten1 s2.0 S0921883122000486 Maintritium.1984Noch keine Bewertungen
- Experimental and Analytical Investigation For TheDokument7 SeitenExperimental and Analytical Investigation For TheKeith DixonNoch keine Bewertungen
- Deep Learning The Spanwise-Averaged Navier-Stokes EquationsDokument26 SeitenDeep Learning The Spanwise-Averaged Navier-Stokes EquationsSushrut KumarNoch keine Bewertungen
- Saha 2018Dokument12 SeitenSaha 2018Haithem HammoudaNoch keine Bewertungen
- 1 s2.0 S0009250921000853 MainDokument13 Seiten1 s2.0 S0009250921000853 MainGanjar GilaNoch keine Bewertungen
- Stability Formula For Tetrapod Incorporating Slope Effect: Coastal Engineering Proceedings December 2012Dokument11 SeitenStability Formula For Tetrapod Incorporating Slope Effect: Coastal Engineering Proceedings December 2012romeoremoNoch keine Bewertungen
- 1348583100dielectric Diagnosis of EHV Current Transformer Using Frequency Domain Spectroscopy (Recovered)Dokument11 Seiten1348583100dielectric Diagnosis of EHV Current Transformer Using Frequency Domain Spectroscopy (Recovered)samrendraNoch keine Bewertungen
- 1EPC2011Dokument7 Seiten1EPC2011max wayneNoch keine Bewertungen
- Evaluation of Eddy Current Losses in The Cover Plates of Distribution TransformersDokument7 SeitenEvaluation of Eddy Current Losses in The Cover Plates of Distribution TransformersJerry Mar LucenaNoch keine Bewertungen
- Improve Air Diffuser Efficiency with Plume Spacing and FlowrateDokument14 SeitenImprove Air Diffuser Efficiency with Plume Spacing and FlowrateStephany CamacaroNoch keine Bewertungen
- Effect of Dominant Parameters For Conical Basin: Gravitational Water Vortex Power PlantDokument7 SeitenEffect of Dominant Parameters For Conical Basin: Gravitational Water Vortex Power PlantNULL ŌP GAMINGNoch keine Bewertungen
- Experimental and Numerical Study On A New Double-Walled Tuned Liquid DamperDokument17 SeitenExperimental and Numerical Study On A New Double-Walled Tuned Liquid DamperDhirendra Kumar PandeyNoch keine Bewertungen
- Promises and Prospects of Two-Dimensional Transistors: PerspectiveDokument11 SeitenPromises and Prospects of Two-Dimensional Transistors: Perspective李映德Noch keine Bewertungen
- Multi Strand Tun DishDokument12 SeitenMulti Strand Tun DishBrajesh KumarNoch keine Bewertungen
- Experimental and Numerical Study On A New Double-Walled Tuned Liquid DamperDokument17 SeitenExperimental and Numerical Study On A New Double-Walled Tuned Liquid DamperGogyNoch keine Bewertungen
- Hydrodynamic Forces On Subsea Pipelines - KarremanDokument6 SeitenHydrodynamic Forces On Subsea Pipelines - KarremanAlberto darianNoch keine Bewertungen
- Flax NewDokument10 SeitenFlax NewRajyalakshmi MNoch keine Bewertungen
- Journal of Electrostatics: B. Ravelo, F. Duval, S. Kane, B. NsomDokument6 SeitenJournal of Electrostatics: B. Ravelo, F. Duval, S. Kane, B. NsomSachin verma T20081Noch keine Bewertungen
- Tuned Liquid Dampers For Control of Earthquake Response: 13 World Conference On Earthquake EngineeringDokument12 SeitenTuned Liquid Dampers For Control of Earthquake Response: 13 World Conference On Earthquake EngineeringDavid SantiagoNoch keine Bewertungen
- Hydrodynamic Scaling and Wave Force Estimation of OffshoreDokument10 SeitenHydrodynamic Scaling and Wave Force Estimation of OffshorevyshakhNoch keine Bewertungen
- Calculating Stray Losses in Power Transformers Using Surface Impedance With Finite ElementsDokument4 SeitenCalculating Stray Losses in Power Transformers Using Surface Impedance With Finite ElementsMatejComelNoch keine Bewertungen
- Banerji Et Al-2000-Earthquake Engineering & Structural DynamicsDokument16 SeitenBanerji Et Al-2000-Earthquake Engineering & Structural DynamicsDhirendra Kumar PandeyNoch keine Bewertungen
- Comprehensive Wave Propagation Model To Improve TDR Interpretations For Geotechnical ApplicationsDokument8 SeitenComprehensive Wave Propagation Model To Improve TDR Interpretations For Geotechnical ApplicationsChih-Ping LinNoch keine Bewertungen
- Numerical Modeling of Vertical Drains With Smear ADokument15 SeitenNumerical Modeling of Vertical Drains With Smear AGuilherme PiscoNoch keine Bewertungen
- HT 18 1061 FinalVersionDokument10 SeitenHT 18 1061 FinalVersionAnonymous SlyvspdBNoch keine Bewertungen
- CFD Analysis of Different Fin-and-Tube Heat Exchangers: September 2010Dokument9 SeitenCFD Analysis of Different Fin-and-Tube Heat Exchangers: September 2010Eden Habte MariamNoch keine Bewertungen
- Numerical Simulacion of Watter HammerDokument4 SeitenNumerical Simulacion of Watter HammerWilliam Lopez AyalaNoch keine Bewertungen
- Chemical Engineering Science: Daniel W. Theobald, Bruce Hanson, Michael Fairweather, Peter J. HeggsDokument14 SeitenChemical Engineering Science: Daniel W. Theobald, Bruce Hanson, Michael Fairweather, Peter J. HeggsJenny Vanessa Quinto CordobaNoch keine Bewertungen
- R5 MRJDokument7 SeitenR5 MRJRISHABH JAMBHULKARNoch keine Bewertungen
- Analisis de Diferentes Perfiles Nrel Riso Naca para HidroturbinasDokument10 SeitenAnalisis de Diferentes Perfiles Nrel Riso Naca para HidroturbinasvictoriaNoch keine Bewertungen
- 1 SMDokument7 Seiten1 SMahmadalsaiahNoch keine Bewertungen
- 1 s2.0 S0950061821026593 MainDokument9 Seiten1 s2.0 S0950061821026593 MainDhirendra Kumar PandeyNoch keine Bewertungen
- Performance of tuned mass dampers under wind loadsDokument13 SeitenPerformance of tuned mass dampers under wind loadsDhirendra Kumar PandeyNoch keine Bewertungen
- Learning Licence Test QuestionsDokument5 SeitenLearning Licence Test QuestionsDhirendra Kumar PandeyNoch keine Bewertungen
- Comparative Seismic Fragility Assessment of An Existing Isolated Continuous Bridge Retrofitted With Different Energy Dissipation DevicesDokument17 SeitenComparative Seismic Fragility Assessment of An Existing Isolated Continuous Bridge Retrofitted With Different Energy Dissipation DevicesDhirendra Kumar PandeyNoch keine Bewertungen
- Bibliography Landslide FinalDokument187 SeitenBibliography Landslide FinalAnonymous D7sfnwmOXNoch keine Bewertungen
- Engineering Structures: Moslem Shahverdi, Christoph Czaderski, Philipp Annen, Masoud MotavalliDokument11 SeitenEngineering Structures: Moslem Shahverdi, Christoph Czaderski, Philipp Annen, Masoud MotavalliDhirendra Kumar PandeyNoch keine Bewertungen
- Lecture 6 - Doubly Reinforced BeamsDokument5 SeitenLecture 6 - Doubly Reinforced BeamsDhirendra Kumar PandeyNoch keine Bewertungen
- 1 s2.0 S0267726121005595 MainDokument16 Seiten1 s2.0 S0267726121005595 MainDhirendra Kumar PandeyNoch keine Bewertungen
- Ding2021 Article OptimizedParametersOfToroidalTDokument21 SeitenDing2021 Article OptimizedParametersOfToroidalTDhirendra Kumar PandeyNoch keine Bewertungen
- MMMMDokument7 SeitenMMMMDhirendra Kumar PandeyNoch keine Bewertungen
- Multi-Level SMA/lead Rubber Bearing Isolation System For Seismic Protection of BridgesDokument19 SeitenMulti-Level SMA/lead Rubber Bearing Isolation System For Seismic Protection of BridgesDhirendra Kumar PandeyNoch keine Bewertungen
- Influence of Ground Motion Duration and Isolation Bearings On The Seismic Isolated BridgesDokument14 SeitenInfluence of Ground Motion Duration and Isolation Bearings On The Seismic Isolated BridgesDhirendra Kumar PandeyNoch keine Bewertungen
- Construction and Building Materials: Moslem Shahverdi, Christoph Czaderski, Masoud MotavalliDokument11 SeitenConstruction and Building Materials: Moslem Shahverdi, Christoph Czaderski, Masoud MotavalliDhirendra Kumar PandeyNoch keine Bewertungen
- An Improved Equivalent Energy-Based Design Procedure For Seismic Isolation System of Simply Supported Bridge in China's High-Speed RailwayDokument16 SeitenAn Improved Equivalent Energy-Based Design Procedure For Seismic Isolation System of Simply Supported Bridge in China's High-Speed RailwayDhirendra Kumar PandeyNoch keine Bewertungen
- Class IV Term-II Revised Oral Assessment ScheduleDokument2 SeitenClass IV Term-II Revised Oral Assessment ScheduleDhirendra Kumar PandeyNoch keine Bewertungen
- Experimental and Numerical Study On A New Double-Walled Tuned Liquid DamperDokument17 SeitenExperimental and Numerical Study On A New Double-Walled Tuned Liquid DamperDhirendra Kumar PandeyNoch keine Bewertungen
- Class IV Term-II SyllabusDokument3 SeitenClass IV Term-II SyllabusDhirendra Kumar PandeyNoch keine Bewertungen
- Performance Assessment of Buildings Isolated by Shape-Memory-Alloy Rubber Bearing: Comparison With Elastomeric Bearing Under Near-Fault EarthquakesDokument17 SeitenPerformance Assessment of Buildings Isolated by Shape-Memory-Alloy Rubber Bearing: Comparison With Elastomeric Bearing Under Near-Fault EarthquakesDhirendra Kumar PandeyNoch keine Bewertungen
- Class 4 CH 12 Part 2Dokument2 SeitenClass 4 CH 12 Part 2Dhirendra Kumar PandeyNoch keine Bewertungen
- Class IV - English Syllabus (Final Term) - 14022022Dokument1 SeiteClass IV - English Syllabus (Final Term) - 14022022Dhirendra Kumar PandeyNoch keine Bewertungen
- Materials Today: Proceedings: S.M. Leela Bharathi, V. Johnpaul, R. Praveen Kumar, R. Surya, T. Vishnu KumarDokument5 SeitenMaterials Today: Proceedings: S.M. Leela Bharathi, V. Johnpaul, R. Praveen Kumar, R. Surya, T. Vishnu KumarDhirendra Kumar PandeyNoch keine Bewertungen
- A State of The Art Review On Beams On NoDokument14 SeitenA State of The Art Review On Beams On NoDhirendra Kumar PandeyNoch keine Bewertungen
- Applied Clay Science: Research PaperDokument7 SeitenApplied Clay Science: Research PaperDhirendra Kumar PandeyNoch keine Bewertungen
- Plastic Waste Concrete-Litrature ReviewDokument10 SeitenPlastic Waste Concrete-Litrature ReviewYara MounaNoch keine Bewertungen
- Construction and Building Materials: Jince P. Zachariah, Partha Pratim Sarkar, Barnali Debnath, Manish PalDokument10 SeitenConstruction and Building Materials: Jince P. Zachariah, Partha Pratim Sarkar, Barnali Debnath, Manish PalDhirendra Kumar PandeyNoch keine Bewertungen
- Predicting Travel Mode of Individuals by Machine Learning: SciencedirectDokument10 SeitenPredicting Travel Mode of Individuals by Machine Learning: Sciencedirectrana__singhNoch keine Bewertungen
- 81320030408Dokument9 Seiten81320030408Dhirendra Kumar PandeyNoch keine Bewertungen
- Efectos para Fibra de PolipropilenoDokument21 SeitenEfectos para Fibra de PolipropilenoFranco HurtadoNoch keine Bewertungen
- Appraisal of Different Artificial Intelligence Techniques For Travel Demand AnalysisDokument27 SeitenAppraisal of Different Artificial Intelligence Techniques For Travel Demand AnalysisDhirendra Kumar PandeyNoch keine Bewertungen
- Decision Trees and ANNDokument28 SeitenDecision Trees and ANNDhirendra Kumar PandeyNoch keine Bewertungen
- Generator DataDokument8 SeitenGenerator DataMohammad Ibnul HossainNoch keine Bewertungen
- Table 6-Peak Solar Heat Gain Thru Ordinary GlassDokument1 SeiteTable 6-Peak Solar Heat Gain Thru Ordinary GlassADsuperman100% (1)
- Solved Problems On TheveninDokument16 SeitenSolved Problems On TheveninsathyaeceNoch keine Bewertungen
- JNTU World Geotech Engineering ExamDokument4 SeitenJNTU World Geotech Engineering ExamDp VisheshNoch keine Bewertungen
- Methods of DehumidificationDokument4 SeitenMethods of Dehumidificationprashant_mahitkar4532100% (3)
- DividersDokument7 SeitenDividersVenkatesh KarriNoch keine Bewertungen
- Calculation of The Current Transformer Accuracy Limit FactorDokument14 SeitenCalculation of The Current Transformer Accuracy Limit FactorWeiKiat Goh67% (3)
- Sae Technical Paper Series: Tankut Acarman and Umit OzgunerDokument9 SeitenSae Technical Paper Series: Tankut Acarman and Umit OzgunerLeonel Bejar VelardeNoch keine Bewertungen
- Experiment #3 / Unit 6 Calorimetry - Measuring Heat Changes During A Physical or Chemical ChangeDokument2 SeitenExperiment #3 / Unit 6 Calorimetry - Measuring Heat Changes During A Physical or Chemical Changeapi-368121935Noch keine Bewertungen
- Day 266 Solution: Ashmit DuttaDokument2 SeitenDay 266 Solution: Ashmit DuttaObama binladenNoch keine Bewertungen
- Resume AyanchattopadhyayDokument2 SeitenResume Ayanchattopadhyayapi-163237383Noch keine Bewertungen
- MQC LabDokument70 SeitenMQC LabAjit BandgarNoch keine Bewertungen
- Reiki Is A Great Tool For Stress Reduction and Relaxation (!)Dokument16 SeitenReiki Is A Great Tool For Stress Reduction and Relaxation (!)vaniaNoch keine Bewertungen
- Literal Equations Name ProjectDokument4 SeitenLiteral Equations Name Projectapi-297789948Noch keine Bewertungen
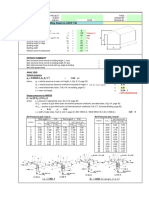
- Bunker DesignDokument25 SeitenBunker DesignswatkoolNoch keine Bewertungen
- Pysical Organic Chapter OneDokument34 SeitenPysical Organic Chapter OneTeferaNoch keine Bewertungen
- HW3 - Solutions (Sec 21)Dokument3 SeitenHW3 - Solutions (Sec 21)Joichiro NishiNoch keine Bewertungen
- Assignment 1 (ELE8306 - 21)Dokument5 SeitenAssignment 1 (ELE8306 - 21)umarsaboNoch keine Bewertungen
- Mech4620 Group 12 Report PDFDokument12 SeitenMech4620 Group 12 Report PDFAaron Hoytash100% (1)
- Archimedes' Principle and Buoyant ForcesDokument20 SeitenArchimedes' Principle and Buoyant ForcesAnonymous yfkitRbSvZNoch keine Bewertungen
- Forces and Gravity QuestionsDokument4 SeitenForces and Gravity QuestionsJan DefrNoch keine Bewertungen
- EMI and ACDokument14 SeitenEMI and ACbharathNoch keine Bewertungen
- Models - Mph.heat Transient AxiDokument6 SeitenModels - Mph.heat Transient AxiAnonymous sAmJfcVNoch keine Bewertungen
- Errata FE WasimDokument4 SeitenErrata FE WasimchafobostonNoch keine Bewertungen
- CK Osborne Reynolds PDFDokument4 SeitenCK Osborne Reynolds PDFChaminduKrishanRupasingheNoch keine Bewertungen
- Work and EnergyDokument32 SeitenWork and Energycreative dudeNoch keine Bewertungen
- Wind Analysis For Low-Rise Building, Based On ASCE 7-98Dokument2 SeitenWind Analysis For Low-Rise Building, Based On ASCE 7-98reynoldNoch keine Bewertungen
- CHEMIST LICENSURE EXAM TABLEDokument8 SeitenCHEMIST LICENSURE EXAM TABLEJasmin NewNoch keine Bewertungen
- Electricity and MagnetismDokument13 SeitenElectricity and MagnetismMohd KhairulNoch keine Bewertungen