Das könnte Ihnen auch gefallen
- Zip Password CrackerDokument31 SeitenZip Password CrackerMoTech100% (1)
- GarageBand TutorialDokument8 SeitenGarageBand TutorialMilan RadisicNoch keine Bewertungen
- Calculating Short Current of TransformerDokument18 SeitenCalculating Short Current of TransformerZaferullah KhanNoch keine Bewertungen
- Protection According To The ANSI - IEEE 946 - Open ElectricalDokument8 SeitenProtection According To The ANSI - IEEE 946 - Open ElectricalDoly DamanikNoch keine Bewertungen
- (Ebook) Electronics - High-Speed Digital DesignDokument446 Seiten(Ebook) Electronics - High-Speed Digital Designchandra sekharNoch keine Bewertungen
- CWCTDokument5 SeitenCWCTtroyel99Noch keine Bewertungen
- Load Dump AnalysisDokument17 SeitenLoad Dump Analysisascvgh20Noch keine Bewertungen
- Three Phase Current - Simple CalculationDokument7 SeitenThree Phase Current - Simple CalculationRinda_RaynaNoch keine Bewertungen
- Arc Flash Hazard Calculations in DC Systems R1Dokument36 SeitenArc Flash Hazard Calculations in DC Systems R1DEVI PRASAD GREENSECURENoch keine Bewertungen
- Application UpsDokument8 SeitenApplication UpsAerwin BautistaNoch keine Bewertungen
- Inverter Battery Sizing FaqDokument3 SeitenInverter Battery Sizing FaqFull DocumentaryNoch keine Bewertungen
- Load ForecastDokument92 SeitenLoad ForecastStevon PaulNoch keine Bewertungen
- Enclosure Heat Load PDFDokument55 SeitenEnclosure Heat Load PDFdexiNoch keine Bewertungen
- Current MeasurementDokument7 SeitenCurrent Measurementmuhd_paehNoch keine Bewertungen
- New Industrial Electrical Safe Work Practices: Paper No. ESW-39 Sal Sferrazza Heath GarrisonDokument5 SeitenNew Industrial Electrical Safe Work Practices: Paper No. ESW-39 Sal Sferrazza Heath GarrisonmjimenezgNoch keine Bewertungen
- Application Development - SMART CARD: Software Architecture and Dataflow DiagramDokument2 SeitenApplication Development - SMART CARD: Software Architecture and Dataflow DiagramAnonymous MSAAwrZC5Noch keine Bewertungen
- Project Quality Management PMPDokument47 SeitenProject Quality Management PMPnguyen728100% (2)
- Cigre Power Quality Indices and ObjectivesDokument96 SeitenCigre Power Quality Indices and ObjectivesAbelNoch keine Bewertungen
- Fast Frequency Response Concepts and BPS Reliability Needs White Paper PDFDokument29 SeitenFast Frequency Response Concepts and BPS Reliability Needs White Paper PDFRaviNoch keine Bewertungen
- Gym Management SystemDokument24 SeitenGym Management SystemManish Sundarraj100% (4)
- Real-Time Simulation Technology for Modern Power ElectronicsVon EverandReal-Time Simulation Technology for Modern Power ElectronicsNoch keine Bewertungen
- Investigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsVon EverandInvestigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsNoch keine Bewertungen
- VSC-FACTS-HVDC: Analysis, Modelling and Simulation in Power GridsVon EverandVSC-FACTS-HVDC: Analysis, Modelling and Simulation in Power GridsNoch keine Bewertungen
- Manual CNC97 BystronicDokument220 SeitenManual CNC97 BystronicSantiago Vanderlei PrataNoch keine Bewertungen
- Mathematical Model For LCL Filter With AFE ConverterDokument4 SeitenMathematical Model For LCL Filter With AFE ConverterSubash Chandar AdikesavanNoch keine Bewertungen
- IEEE Guide For Field Testing of Shielded Power Cable Systems Using Very Low Frequency (VLF) (Less Than 1 HZ)Dokument60 SeitenIEEE Guide For Field Testing of Shielded Power Cable Systems Using Very Low Frequency (VLF) (Less Than 1 HZ)Arturo Isidro Conde Pérez100% (1)
- Ieee Pels December 2018Dokument96 SeitenIeee Pels December 2018Gerald Christopher RajNoch keine Bewertungen
- Medium-Voltage High-Speed Source-Transfer Switching Systems A New Tool To Solve Power Quality ProDokument6 SeitenMedium-Voltage High-Speed Source-Transfer Switching Systems A New Tool To Solve Power Quality Proue06037Noch keine Bewertungen
- Modern Control of DC-Based Power Systems: A Problem-Based ApproachVon EverandModern Control of DC-Based Power Systems: A Problem-Based ApproachNoch keine Bewertungen
- LS Retail Training Manual Version 4.2Dokument170 SeitenLS Retail Training Manual Version 4.2MOHAMMED AARIFNoch keine Bewertungen
- Models For Insulation Aging Under Electrical and Thermal MultistressDokument12 SeitenModels For Insulation Aging Under Electrical and Thermal MultistressRogelio RevettiNoch keine Bewertungen
- Eltek Marine Offshore Catalogue PDFDokument44 SeitenEltek Marine Offshore Catalogue PDFjunior9742Noch keine Bewertungen
- Power Quality Improvement in Power System Using UPFCDokument6 SeitenPower Quality Improvement in Power System Using UPFCEditor IJTSRDNoch keine Bewertungen
- Medium Voltage Fuse LinksDokument12 SeitenMedium Voltage Fuse LinksArturo Isidro Conde PérezNoch keine Bewertungen
- Analyzing The Effect of Ambient Temperature and Loads Power Factor On Electric Generator Power RatingDokument6 SeitenAnalyzing The Effect of Ambient Temperature and Loads Power Factor On Electric Generator Power Ratingdanferreiro8318Noch keine Bewertungen
- What Is A Static SwitchDokument1 SeiteWhat Is A Static SwitchMary HarrisonNoch keine Bewertungen
- UN Test Manual Lithium Battery RequirementsDokument10 SeitenUN Test Manual Lithium Battery Requirementsvenkata_gaddamNoch keine Bewertungen
- Different Modeling Aspects and Energy Systems of Unified Power Quality Conditioner (UPQC) - An Overview (#168251) - 148354Dokument8 SeitenDifferent Modeling Aspects and Energy Systems of Unified Power Quality Conditioner (UPQC) - An Overview (#168251) - 148354Marshallchiyan PhilipNoch keine Bewertungen
- Power Control of DC Microgrid With Variable Generation and Energy StorageDokument5 SeitenPower Control of DC Microgrid With Variable Generation and Energy StorageSEP-PublisherNoch keine Bewertungen
- Industrial Load ModelingDokument15 SeitenIndustrial Load ModelingSandeepNoch keine Bewertungen
- Electrical Thumb Rules You MUST Follow Part 4Dokument4 SeitenElectrical Thumb Rules You MUST Follow Part 4shaikhsajid242Noch keine Bewertungen
- Modelling of LithiumDokument18 SeitenModelling of LithiumSaumya SinhaNoch keine Bewertungen
- Arc Flash Faults Calculations Hazard AnalysisDokument10 SeitenArc Flash Faults Calculations Hazard AnalysisMuhammad ShahzaibNoch keine Bewertungen
- Telecom Battery PDFDokument2 SeitenTelecom Battery PDFAq MwNoch keine Bewertungen
- HPS Catalog Dry-Type Medium VoltageDokument15 SeitenHPS Catalog Dry-Type Medium VoltageEmilio SalazarNoch keine Bewertungen
- Unified Power Quality ConditionerDokument19 SeitenUnified Power Quality ConditionerShameer Sr S RNoch keine Bewertungen
- Design of Unified Power Quality Conditioner (UPQC)Dokument7 SeitenDesign of Unified Power Quality Conditioner (UPQC)Hari PrasadNoch keine Bewertungen
- Maxim RS485 Appnote PDFDokument6 SeitenMaxim RS485 Appnote PDFgunnarwinbladNoch keine Bewertungen
- FusingDokument2 SeitenFusingsusanta2uNoch keine Bewertungen
- How To Design Multi-Kw Converters For Electric Vehicles Part 4 - Power Factor Correction PDFDokument9 SeitenHow To Design Multi-Kw Converters For Electric Vehicles Part 4 - Power Factor Correction PDFoszemNoch keine Bewertungen
- Distributed Energy StorageDokument3 SeitenDistributed Energy StoragejuevesNoch keine Bewertungen
- DMX Dimmer PackDokument6 SeitenDMX Dimmer PackcdvsolucionesNoch keine Bewertungen
- Predicting Fusing Time of Overloaded PCB Traces Can We Predict It at All - With Douglas Brooks, PHD and Dr. Johannes Adam - ARTECH HOUSE INSIDERDokument12 SeitenPredicting Fusing Time of Overloaded PCB Traces Can We Predict It at All - With Douglas Brooks, PHD and Dr. Johannes Adam - ARTECH HOUSE INSIDERGanesan SNoch keine Bewertungen
- Diesel Generator IEEE Paper 01601575Dokument11 SeitenDiesel Generator IEEE Paper 01601575martinpellsNoch keine Bewertungen
- c1 PDFDokument43 Seitenc1 PDFMadhushan DassanayakeNoch keine Bewertungen
- Three Phase CurrentDokument3 SeitenThree Phase CurrentThien TranNoch keine Bewertungen
- Fault Current and The Effects On Clampstar®: Test At)Dokument4 SeitenFault Current and The Effects On Clampstar®: Test At)Dante FilhoNoch keine Bewertungen
- Efficiency Trends in Electric Machines and DrivesDokument6 SeitenEfficiency Trends in Electric Machines and Drivessadeq03Noch keine Bewertungen
- A Cyber-Physical Threat Analysis For MicrogridsDokument7 SeitenA Cyber-Physical Threat Analysis For MicrogridsjmescalanteNoch keine Bewertungen
- SFSDokument90 SeitenSFSAn NgocSonNoch keine Bewertungen
- Inertia Constant EstimationDokument8 SeitenInertia Constant EstimationSubhadeep PaladhiNoch keine Bewertungen
- A Short History of ReliabilityDokument9 SeitenA Short History of ReliabilityAlon Goldis100% (1)
- Toyota's R&D Activities For Realizing Sustainable MobilityDokument17 SeitenToyota's R&D Activities For Realizing Sustainable MobilitysamabuelsamidNoch keine Bewertungen
- Modelling and Simulation of Power Quality IssuesDokument27 SeitenModelling and Simulation of Power Quality IssuesMayaNoch keine Bewertungen
- Circuit Breaker Concepts For Future High-PowerDokument7 SeitenCircuit Breaker Concepts For Future High-PowerJuly CarranzaNoch keine Bewertungen
- Modelling System Reliability Using Continuous-Time Markov ChainDokument4 SeitenModelling System Reliability Using Continuous-Time Markov ChainjoyopsonNoch keine Bewertungen
- Electrical Power DistributionDokument3 SeitenElectrical Power DistributionRustha123Noch keine Bewertungen
- Research and Development in Non-Mechanical Electrical Power Sources: Proceedings of the 6th International Symposium Held at Brighton, September 1968Von EverandResearch and Development in Non-Mechanical Electrical Power Sources: Proceedings of the 6th International Symposium Held at Brighton, September 1968Noch keine Bewertungen
- Electrical Load-Curve Coverage: Proceedings of the Symposium on Load-Curve Coverage in Future Electric Power Generating Systems, Organized by the Committee on Electric Power, United Nations Economic Commission for Europe, Rome, Italy, 24 – 28 October 1977Von EverandElectrical Load-Curve Coverage: Proceedings of the Symposium on Load-Curve Coverage in Future Electric Power Generating Systems, Organized by the Committee on Electric Power, United Nations Economic Commission for Europe, Rome, Italy, 24 – 28 October 1977Noch keine Bewertungen
- Relevador Be1-951 PDFDokument534 SeitenRelevador Be1-951 PDFArturo Isidro Conde PérezNoch keine Bewertungen
- XT3 User Guide - Version 0.9Dokument75 SeitenXT3 User Guide - Version 0.9Arturo Isidro Conde PérezNoch keine Bewertungen
- WT3 Users Guide V2.1Dokument83 SeitenWT3 Users Guide V2.1Arturo Isidro Conde PérezNoch keine Bewertungen
- Shirla Application Guide Vers 1 04-2010 PDFDokument26 SeitenShirla Application Guide Vers 1 04-2010 PDFArturo Isidro Conde PérezNoch keine Bewertungen
- Overview of Solutions: Motor ProtectionDokument8 SeitenOverview of Solutions: Motor ProtectionArturo Isidro Conde PérezNoch keine Bewertungen
- Interpact INS250 To 630 Interpact INV100 To 630: ConnectionDokument5 SeitenInterpact INS250 To 630 Interpact INV100 To 630: ConnectionArturo Isidro Conde PérezNoch keine Bewertungen
- 550E1100 Ns PresentacionDokument8 Seiten550E1100 Ns PresentacionArturo Isidro Conde PérezNoch keine Bewertungen
- 550E2050 - Caract GralesDokument2 Seiten550E2050 - Caract GralesArturo Isidro Conde PérezNoch keine Bewertungen
- 550E2100 - Prott Low Voltage SysDokument30 Seiten550E2100 - Prott Low Voltage SysArturo Isidro Conde PérezNoch keine Bewertungen
- 182 03 - SGR&MDGFDokument32 Seiten182 03 - SGR&MDGFArturo Isidro Conde PérezNoch keine Bewertungen
- S&C Fault Tamer Fuse LimiterDokument1 SeiteS&C Fault Tamer Fuse LimiterArturo Isidro Conde PérezNoch keine Bewertungen
- U.A.Bakshi, M.V.Bakshi - Protection and Switchgear (2006, Technical Publications) PDFDokument397 SeitenU.A.Bakshi, M.V.Bakshi - Protection and Switchgear (2006, Technical Publications) PDFArturo Isidro Conde Pérez0% (1)
- The Cigre HVDC Benchmark Model A New Porposal With Revised Parameters PDFDokument6 SeitenThe Cigre HVDC Benchmark Model A New Porposal With Revised Parameters PDFArturo Isidro Conde PérezNoch keine Bewertungen
- Motor Fuse 20 StartersDokument10 SeitenMotor Fuse 20 StartersArturo Isidro Conde PérezNoch keine Bewertungen
- Fixed Wireless Solution Fixed Wireless Solution: Gigabit GigabitDokument34 SeitenFixed Wireless Solution Fixed Wireless Solution: Gigabit GigabitSahibzada NizamuddinNoch keine Bewertungen
- Microwave - Pathloss IV TrainingDokument3 SeitenMicrowave - Pathloss IV TrainingbantunnaNoch keine Bewertungen
- CV Qazim PDFDokument1 SeiteCV Qazim PDFUtkarsh Anand CSENoch keine Bewertungen
- Balika I 2020Dokument15 SeitenBalika I 2020Kiran SomayajiNoch keine Bewertungen
- Series 4100 - 500W - 1000WDokument37 SeitenSeries 4100 - 500W - 1000WF1yman100% (2)
- TPM KN MMHDokument12 SeitenTPM KN MMHKn ShaplaNoch keine Bewertungen
- R15V0L PitDokument4 SeitenR15V0L PitRoberto AlarmaNoch keine Bewertungen
- Farman Ullah: PersonalDokument3 SeitenFarman Ullah: PersonalArslan ShafiNoch keine Bewertungen
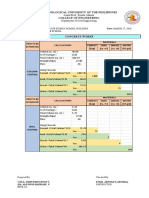
- 2 Concrete Works CompuDokument14 Seiten2 Concrete Works CompuALFONSO RAPHAEL SIANoch keine Bewertungen
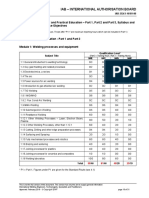
- IWE SyllabusDokument4 SeitenIWE Syllabusmdasifkhan2013Noch keine Bewertungen
- Owner's ManualDokument208 SeitenOwner's ManualChantal LilouNoch keine Bewertungen
- Potopna Crpka PEDROLLO VXC Vortex BrosuraDokument4 SeitenPotopna Crpka PEDROLLO VXC Vortex Brosurajose03Noch keine Bewertungen
- Wireless Headphones Bluedio T2 Plus Turbine - 75Mm Driver, Bluetooth 4.1, 220mah Battery, Built-In Mic, FM Mode, SD Card, 110DbDokument7 SeitenWireless Headphones Bluedio T2 Plus Turbine - 75Mm Driver, Bluetooth 4.1, 220mah Battery, Built-In Mic, FM Mode, SD Card, 110DbLinas BielskisNoch keine Bewertungen
- Saudi Arabian Oil Company: Equipment Noise Data SheetDokument1 SeiteSaudi Arabian Oil Company: Equipment Noise Data SheetAnonymous X3PnFL6Noch keine Bewertungen
- FlucsPro Ver 6 - 0 Web Training Notes Rev1Dokument32 SeitenFlucsPro Ver 6 - 0 Web Training Notes Rev1dharshan balajiNoch keine Bewertungen
- PD Smart PDFDokument2 SeitenPD Smart PDFAriel Leandro Toro MuñozNoch keine Bewertungen
- LIENSON Company ProfileDokument8 SeitenLIENSON Company ProfileShino Ping PoongNoch keine Bewertungen
- Course - Ng-Bootstrap PlaybookDokument49 SeitenCourse - Ng-Bootstrap PlaybookshyamVENKATNoch keine Bewertungen
- Premier League Season Review 2020 - 21Dokument9 SeitenPremier League Season Review 2020 - 21Iftar KhanNoch keine Bewertungen
- ACS880 - Diode Supply CNTRL Prog - FW Manual - Rev BDokument126 SeitenACS880 - Diode Supply CNTRL Prog - FW Manual - Rev BerrikcoyNoch keine Bewertungen
- BTF PDFDokument4 SeitenBTF PDFArif PujiNoch keine Bewertungen
- CTSA Technical Proposal Template 10-001Dokument9 SeitenCTSA Technical Proposal Template 10-001yasirtanvirNoch keine Bewertungen