Das könnte Ihnen auch gefallen
- Armónicas en Sistemas Eléctricos IndustrialesVon EverandArmónicas en Sistemas Eléctricos IndustrialesBewertung: 4.5 von 5 Sternen4.5/5 (12)
- Curso moderno de máquinas eléctricas rotativas: Las máquinas eléctricas en régimen dinámicoVon EverandCurso moderno de máquinas eléctricas rotativas: Las máquinas eléctricas en régimen dinámicoNoch keine Bewertungen
- Unidad 1 Sistemas Electricos de Potencia.Dokument24 SeitenUnidad 1 Sistemas Electricos de Potencia.MaxDrucker100% (2)
- Ejemplos Sistema PUDokument16 SeitenEjemplos Sistema PUCarlos Jose Rodriguez MartinezNoch keine Bewertungen
- Experiencias sobre circuitos eléctricos en serie operados por corriente directaVon EverandExperiencias sobre circuitos eléctricos en serie operados por corriente directaNoch keine Bewertungen
- Motor asíncrono trifásico de rotor devanadoDokument26 SeitenMotor asíncrono trifásico de rotor devanadoJulian Torre CarrascoNoch keine Bewertungen
- Control vectorial de máquinas asincrónicasDokument36 SeitenControl vectorial de máquinas asincrónicasRaul Negron GodoyNoch keine Bewertungen
- Cap. 2 El Alternador VVVDokument18 SeitenCap. 2 El Alternador VVVEric Araya100% (10)
- Carga y Regulacion de Voltaje en Generadores SincronosDokument22 SeitenCarga y Regulacion de Voltaje en Generadores SincronosIthan Merchant67% (3)
- Teorema de Thevenin en ACDokument25 SeitenTeorema de Thevenin en ACSimón De Jesús SalasNoch keine Bewertungen
- La Máquina Síncrona Como Fuente de ReactivosDokument21 SeitenLa Máquina Síncrona Como Fuente de ReactivosJoseph Morrow50% (2)
- Trastornos PersonalidadDokument1 SeiteTrastornos PersonalidadÁngel Silva100% (1)
- Apuntes de Sistemas de Potencia 2009-1Dokument158 SeitenApuntes de Sistemas de Potencia 2009-1lggs773Noch keine Bewertungen
- Presión de VaporDokument4 SeitenPresión de VaporJuly Vergara100% (1)
- Prueba 2 Primeras CivilizacionesDokument7 SeitenPrueba 2 Primeras CivilizacionesDiego Ossandon MenesesNoch keine Bewertungen
- M14 U2 S4 OsccDokument17 SeitenM14 U2 S4 Osccosvaldo80% (5)
- Ejercicios de Integrales de Línea, Superficie y VolumenVon EverandEjercicios de Integrales de Línea, Superficie y VolumenBewertung: 4 von 5 Sternen4/5 (2)
- Control de Un ServomotorDokument12 SeitenControl de Un ServomotorGabriel Atenco100% (1)
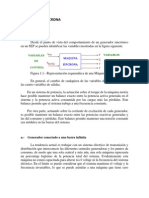
- Ecuación potencia-ángulo para un generador conectado a una barra infinitaDokument17 SeitenEcuación potencia-ángulo para un generador conectado a una barra infinitaIrene SCNoch keine Bewertungen
- Libreto Día Del LogroDokument2 SeitenLibreto Día Del LogroXandy Solange Meza VillanedaNoch keine Bewertungen
- Códigos de ContralorDokument20 SeitenCódigos de ContralorAdrian BerdunNoch keine Bewertungen
- Unidad V - Casos de Estudio de EstabilidadDokument138 SeitenUnidad V - Casos de Estudio de Estabilidadjose antonio taverasNoch keine Bewertungen
- Criterio de Areas IgualesDokument16 SeitenCriterio de Areas IgualesXavier EstrellaNoch keine Bewertungen
- Ecuación de Potencia Ángulo (1) 1Dokument6 SeitenEcuación de Potencia Ángulo (1) 1diego baron huelvasNoch keine Bewertungen
- Estabilidad TransitoriaDokument11 SeitenEstabilidad Transitorialuis medinaNoch keine Bewertungen
- Estabilidad Sistemas Electricos de Potencia PDFDokument25 SeitenEstabilidad Sistemas Electricos de Potencia PDFJuan Camilo Rivera MayaNoch keine Bewertungen
- Apuntes de Sistemas Electricos de Potencia PDFDokument137 SeitenApuntes de Sistemas Electricos de Potencia PDFDaniel Bermudez100% (1)
- Máquina SincronaDokument10 SeitenMáquina Sincronajpadilla050Noch keine Bewertungen
- La Maquina SincronaDokument18 SeitenLa Maquina Sincronaluis rondon100% (2)
- Sistema de Control Automatico de Velocidad de Generadores Eléctricos de PotenciaDokument11 SeitenSistema de Control Automatico de Velocidad de Generadores Eléctricos de PotenciaJohn CarmonaNoch keine Bewertungen
- Principio de ReciprocidadDokument12 SeitenPrincipio de Reciprocidadyo90901100% (1)
- Circuitos equivalentes y ensayos de transformadoresDokument39 SeitenCircuitos equivalentes y ensayos de transformadoresPippo Huaman CornelioNoch keine Bewertungen
- Moldeamiento Dinámico de Un Estanque de AguaDokument28 SeitenMoldeamiento Dinámico de Un Estanque de AguaKekaNoch keine Bewertungen
- Capitulo2 3Dokument11 SeitenCapitulo2 3karen dejoNoch keine Bewertungen
- Diagramas bicircular y de concoides de una máquina síncronicaDokument17 SeitenDiagramas bicircular y de concoides de una máquina síncronicaAnonymous PzjfUQbjNoch keine Bewertungen
- Estabilidad SepDokument20 SeitenEstabilidad SepvitrysmaitaNoch keine Bewertungen
- Conceptos básicos de circuitos monofásicos de CADokument18 SeitenConceptos básicos de circuitos monofásicos de CARicardo MadrigalNoch keine Bewertungen
- 06) Me Sincronica IVDokument10 Seiten06) Me Sincronica IVgerman figueroaNoch keine Bewertungen
- Informe Maquina Asincrona USMDokument23 SeitenInforme Maquina Asincrona USMJulioPachecoCornejoNoch keine Bewertungen
- Generación de curvas P-V para el análisis de estabilidad de tensión en sistemas eléctricosDokument5 SeitenGeneración de curvas P-V para el análisis de estabilidad de tensión en sistemas eléctricosEdgard Martin Mejia SolanoNoch keine Bewertungen
- Control de velocidad de motores de CCDokument21 SeitenControl de velocidad de motores de CCJulián Andrés Jofre VergaraNoch keine Bewertungen
- Introducción Al Sistema Quanser & Motor DCDokument6 SeitenIntroducción Al Sistema Quanser & Motor DCJuan JuradöNoch keine Bewertungen
- Taller Respuesta TemporalDokument9 SeitenTaller Respuesta TemporaldaianamarchNoch keine Bewertungen
- Secuencia FasesDokument8 SeitenSecuencia FasesPatricio CaboNoch keine Bewertungen
- Capitulo 11 - Estabilidad TransitoriaDokument76 SeitenCapitulo 11 - Estabilidad TransitoriaFelipeBarreraAlvarez100% (2)
- Manual para Motores de Corriente AlternaDokument21 SeitenManual para Motores de Corriente AlternaAldo Martin BustosNoch keine Bewertungen
- Facultad de Ingeniería Eléctrica y Electrónica: Laboratorio de Maquinas Electricas Ii Ee242NDokument18 SeitenFacultad de Ingeniería Eléctrica y Electrónica: Laboratorio de Maquinas Electricas Ii Ee242NJUAN JESUS MALASQUEZ MUGABURUNoch keine Bewertungen
- Metodo PorcentualDokument11 SeitenMetodo PorcentualManuel CabreraNoch keine Bewertungen
- MEC314Dokument6 SeitenMEC314MiltonNoch keine Bewertungen
- Prueba 1 - Protecciones y Accionamientos Eléctricos - Wilson Bolados AlvarezDokument16 SeitenPrueba 1 - Protecciones y Accionamientos Eléctricos - Wilson Bolados AlvarezWilson BoladosNoch keine Bewertungen
- Falla Linea - TierraDokument15 SeitenFalla Linea - TierraSofía Zuluaga GallegoNoch keine Bewertungen
- Ejercicios Potencia TrifasicaDokument10 SeitenEjercicios Potencia TrifasicaRodrigo Fritis LopezNoch keine Bewertungen
- Máquinas SíncronasDokument8 SeitenMáquinas SíncronasjyebraNoch keine Bewertungen
- Laboratorio 1 Circuitos TrifaasicosDokument43 SeitenLaboratorio 1 Circuitos TrifaasicosJose Miguel ChacónNoch keine Bewertungen
- Distorsión Armónica y Factor de PotenciaDokument6 SeitenDistorsión Armónica y Factor de PotenciaClaudio ValenzuelaNoch keine Bewertungen
- TrifasicosDokument23 SeitenTrifasicosAnthony Fredy Sanchez AltamiranoNoch keine Bewertungen
- Control de Posición de Un Servo-MecanismoDokument16 SeitenControl de Posición de Un Servo-MecanismoJuan Antonio Ramirez Buitrago100% (2)
- Respuestas de sistemas ante entrada escalónDokument9 SeitenRespuestas de sistemas ante entrada escalónLeandro SanchezNoch keine Bewertungen
- Experiencia N - 3 Circuitos Electricos IIDokument8 SeitenExperiencia N - 3 Circuitos Electricos IIGuillermo VásquezNoch keine Bewertungen
- Transformadores Unidad 9Dokument8 SeitenTransformadores Unidad 9Alexander HerreraNoch keine Bewertungen
- Condiciones para Acoplamiento en Paralelo de GeneradoresDokument10 SeitenCondiciones para Acoplamiento en Paralelo de GeneradoresmariaNoch keine Bewertungen
- Implementación y Análisis de Un Convertidor de DC A Ac Tipo Push PullDokument10 SeitenImplementación y Análisis de Un Convertidor de DC A Ac Tipo Push PullCarolina RestrepoNoch keine Bewertungen
- Ciencia FiccionDokument1 SeiteCiencia FiccionXimena GutierrezNoch keine Bewertungen
- FormatoDokument1 SeiteFormatoXimena GutierrezNoch keine Bewertungen
- ESTUDIODokument1 SeiteESTUDIOXimena GutierrezNoch keine Bewertungen
- Objeto de EstudioDokument1 SeiteObjeto de EstudioXimena GutierrezNoch keine Bewertungen
- 6666Dokument1 Seite6666Ximena GutierrezNoch keine Bewertungen
- Objeto de EstudioDokument1 SeiteObjeto de EstudioXimena GutierrezNoch keine Bewertungen
- Contexto: La Compañía PM Cuenta Con Un Direccionamiento Estratégico en DondeDokument1 SeiteContexto: La Compañía PM Cuenta Con Un Direccionamiento Estratégico en DondeXimena GutierrezNoch keine Bewertungen
- Solicitud de lockers: requisitos y condicionesDokument1 SeiteSolicitud de lockers: requisitos y condicionesXimena GutierrezNoch keine Bewertungen
- Solicitud de lockers: requisitos y condicionesDokument1 SeiteSolicitud de lockers: requisitos y condicionesXimena GutierrezNoch keine Bewertungen
- 6666Dokument1 Seite6666Ximena GutierrezNoch keine Bewertungen
- Tesis Analisis Del Proceso Administrativo y Su Incidencia en La Operatividad de La Empresa Mercredi SaDokument208 SeitenTesis Analisis Del Proceso Administrativo y Su Incidencia en La Operatividad de La Empresa Mercredi SaLuisa Milagros Pacheco MorenoNoch keine Bewertungen
- Objeto de EstudioDokument1 SeiteObjeto de EstudioXimena GutierrezNoch keine Bewertungen
- Elena Isabel Sarmiento Barrios-UltimoDokument24 SeitenElena Isabel Sarmiento Barrios-UltimoXimena GutierrezNoch keine Bewertungen
- Objeto de EstudioDokument1 SeiteObjeto de EstudioXimena GutierrezNoch keine Bewertungen
- Evidence My ProfilennDokument4 SeitenEvidence My ProfilennjohanaNoch keine Bewertungen
- En Una Oportunidad AnteriorDokument3 SeitenEn Una Oportunidad AnteriorXimena GutierrezNoch keine Bewertungen
- Evidencia AA2Dokument4 SeitenEvidencia AA2Ximena GutierrezNoch keine Bewertungen
- Elena Isabel Sarmiento Barrios-UltimoDokument24 SeitenElena Isabel Sarmiento Barrios-UltimoXimena GutierrezNoch keine Bewertungen
- InformeDokument2 SeitenInformeXimena GutierrezNoch keine Bewertungen
- Evidencia Caso Aa2Dokument2 SeitenEvidencia Caso Aa2Ximena GutierrezNoch keine Bewertungen
- Caso AA1Dokument4 SeitenCaso AA1Juan de Jesus Montenegro Susa85% (34)
- Evidencia Caso Aa2Dokument2 SeitenEvidencia Caso Aa2Ximena GutierrezNoch keine Bewertungen
- Terman-Merril: cuadernillo de aplicación de 10 seriesDokument12 SeitenTerman-Merril: cuadernillo de aplicación de 10 seriesJorge GonzalezNoch keine Bewertungen
- Informe 1 MarzoDokument1 SeiteInforme 1 MarzoXimena GutierrezNoch keine Bewertungen
- ACTIVIDA3EVIDENCIAA2Dokument58 SeitenACTIVIDA3EVIDENCIAA2Ximena GutierrezNoch keine Bewertungen
- Amar o Depender Walter Riso Libro Completo Descargar GratisDokument22 SeitenAmar o Depender Walter Riso Libro Completo Descargar GratisXimena GutierrezNoch keine Bewertungen
- Avances Ci 10 de JulioDokument5 SeitenAvances Ci 10 de JulioXimena GutierrezNoch keine Bewertungen
- Test Diagnosticos 97 2003Dokument21 SeitenTest Diagnosticos 97 2003scottomcNoch keine Bewertungen
- Product oDokument1 SeiteProduct oChalo ValenciaNoch keine Bewertungen
- Terman-Merril: cuadernillo de aplicación de 10 seriesDokument12 SeitenTerman-Merril: cuadernillo de aplicación de 10 seriesJorge GonzalezNoch keine Bewertungen
- Sor Juana Inés de La Cruz Hombres Necios Que AcusáisDokument1 SeiteSor Juana Inés de La Cruz Hombres Necios Que Acusáisjohn11701Noch keine Bewertungen
- Plan de Computacion para EnfermeriaDokument2 SeitenPlan de Computacion para EnfermeriaRamon DiazNoch keine Bewertungen
- Conceptos PsicomotrisidadDokument6 SeitenConceptos PsicomotrisidadFredy AlmonaciNoch keine Bewertungen
- TituloDokument214 SeitenTituloFRANZ DE ARMAS0% (1)
- Propiedades de La Estimación PuntualDokument8 SeitenPropiedades de La Estimación PuntualDulceCatúnGuevaraNoch keine Bewertungen
- Fisica Vol 3 Fundamentos Cuanticos EstadisticosDokument614 SeitenFisica Vol 3 Fundamentos Cuanticos EstadisticosYeison LRNoch keine Bewertungen
- Taller Español N°1Dokument4 SeitenTaller Español N°1Dary Benitez100% (1)
- Hacedor de Caminos - ADokument1 SeiteHacedor de Caminos - AMarlon ObandoNoch keine Bewertungen
- Guia Metodologia Maria Fernandez 5to Año BDokument5 SeitenGuia Metodologia Maria Fernandez 5to Año BMaria FernandezNoch keine Bewertungen
- Comparatives and SuperlativesDokument3 SeitenComparatives and SuperlativesFernando Alameda TorijanoNoch keine Bewertungen
- GUÍA DE APRENDIZAJE REVINCULACIÓN 6to JulioDokument4 SeitenGUÍA DE APRENDIZAJE REVINCULACIÓN 6to JulioCarlaNoch keine Bewertungen
- Para Trabajo de DidacticaDokument80 SeitenPara Trabajo de DidacticaroyerNoch keine Bewertungen
- Aplique Al RED SeleccionadoDokument9 SeitenAplique Al RED SeleccionadoNubia Ester García Florez100% (1)
- Técnica de Instrumentación en Dientes TemporalesDokument1 SeiteTécnica de Instrumentación en Dientes Temporalesjasmery huillca ttitoNoch keine Bewertungen
- PSICOTECNICODokument9 SeitenPSICOTECNICONicolás PereyraNoch keine Bewertungen
- Día de La Niñez - Violeta Salva El MundoDokument26 SeitenDía de La Niñez - Violeta Salva El MundoDaniela FloresNoch keine Bewertungen
- Cardesin - La Misión Del Artista PDFDokument20 SeitenCardesin - La Misión Del Artista PDFOrdoñez Amador Ana LuciaNoch keine Bewertungen
- Dante AlighieriDokument13 SeitenDante AlighieriSofía ParedNoch keine Bewertungen
- Freud - Esquema Del PsicoanálisisDokument12 SeitenFreud - Esquema Del PsicoanálisisBel MartínezNoch keine Bewertungen
- Act - Otros Elementos de La Cultura EcuatorianaDokument5 SeitenAct - Otros Elementos de La Cultura EcuatorianaAnthony Elian Carrión CabreraNoch keine Bewertungen
- Diagnóstico DPPDokument68 SeitenDiagnóstico DPPVictor Andres Pretell RodriguezNoch keine Bewertungen
- Fascículo: Notas de MatemáticaDokument16 SeitenFascículo: Notas de MatemáticaGIANCARLO LIBREROS LONDONONoch keine Bewertungen
- P.P Subjuntivo PresenteDokument16 SeitenP.P Subjuntivo PresenteMattia EmoliNoch keine Bewertungen
- AcentuaciónDokument24 SeitenAcentuaciónJph LibeNoch keine Bewertungen