Das könnte Ihnen auch gefallen
- NetspeedDokument1 SeiteNetspeededuardolarangeiraNoch keine Bewertungen
- Sgpipe 001Dokument1 SeiteSgpipe 001eduardolarangeiraNoch keine Bewertungen
- Final Exam Exercise 2Dokument2 SeitenFinal Exam Exercise 2eduardolarangeiraNoch keine Bewertungen
- HMW1 PDFDokument11 SeitenHMW1 PDFeduardolarangeiraNoch keine Bewertungen
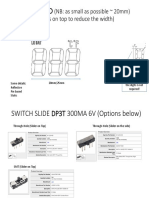
- Sketch of LCD and Switch Requirement Rev2Dokument2 SeitenSketch of LCD and Switch Requirement Rev2eduardolarangeiraNoch keine Bewertungen
- Building Better Products With FEA Analysis Pg.17Dokument9 SeitenBuilding Better Products With FEA Analysis Pg.17eduardolarangeiraNoch keine Bewertungen
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- ch2 Phy9Dokument11 Seitench2 Phy9Usman babarNoch keine Bewertungen
- L1 - Kinematics 1DDokument70 SeitenL1 - Kinematics 1DAnurag SahuNoch keine Bewertungen
- PARESEARCHmotion Time DisplacementDokument5 SeitenPARESEARCHmotion Time DisplacementAlex CybernetNoch keine Bewertungen
- P0822Dokument4 SeitenP0822Adnan KhaldunNoch keine Bewertungen
- Motion Unit PacketDokument10 SeitenMotion Unit PacketjulieNoch keine Bewertungen
- Rel ToolDokument2 SeitenRel ToolMIICHELDELAONoch keine Bewertungen
- Chapter 3 Application of DifferentiationDokument33 SeitenChapter 3 Application of DifferentiationAdron LimNoch keine Bewertungen
- Describing Motion of An ObjectDokument3 SeitenDescribing Motion of An ObjectJanella Patrizia100% (4)
- Motion in A Straight Line: SyllabusDokument55 SeitenMotion in A Straight Line: SyllabusVinay Aanand AanandNoch keine Bewertungen
- Engineering Mechanics PPT 1Dokument48 SeitenEngineering Mechanics PPT 1muralikrishna1917100% (3)
- TQ Third Grading 1st SummativeDokument3 SeitenTQ Third Grading 1st SummativeRodrigoNoch keine Bewertungen
- Kinematics Questions PDFDokument18 SeitenKinematics Questions PDFZsadist20Noch keine Bewertungen
- Form 4 Physics Chapter 2.1 2.2Dokument22 SeitenForm 4 Physics Chapter 2.1 2.2Samuel LiewNoch keine Bewertungen
- GENG4405 Assignment2 2013Dokument6 SeitenGENG4405 Assignment2 2013dougv92Noch keine Bewertungen
- MECHANICS Kinematics: Chapter 2 - Motion Along A Straight LineDokument11 SeitenMECHANICS Kinematics: Chapter 2 - Motion Along A Straight LineDan AltmanNoch keine Bewertungen
- Motion Along A Straight LineDokument15 SeitenMotion Along A Straight LineSyed NazmiNoch keine Bewertungen
- Chapter 9 - Motion Along A Straight LinesDokument5 SeitenChapter 9 - Motion Along A Straight Linesahmadkamil9286% (7)
- SMK Tat Beng Physics Form 4 2.1 Linear MotionDokument69 SeitenSMK Tat Beng Physics Form 4 2.1 Linear MotionTee Ting QINoch keine Bewertungen
- UarmDokument4 SeitenUarmArianeManlangit100% (1)
- Aplicaciones Derivada Cinematica - Calculo-Nivel MedioDokument14 SeitenAplicaciones Derivada Cinematica - Calculo-Nivel MedioWilliam YundaNoch keine Bewertungen
- Chapter 4 Linear MotionDokument42 SeitenChapter 4 Linear MotionChidube MekkamNoch keine Bewertungen
- 04-2 DisplacementDokument25 Seiten04-2 DisplacementBigraBadshahNoch keine Bewertungen
- Motion in 1 - D.Dokument20 SeitenMotion in 1 - D.Ipshita PathakNoch keine Bewertungen
- PHY 130 - Chapter 2 - Kinematics in One DimensionDokument47 SeitenPHY 130 - Chapter 2 - Kinematics in One Dimensionainnajwa97Noch keine Bewertungen
- Physics Form 4: Linear MotionDokument22 SeitenPhysics Form 4: Linear MotionSue Suraya Naza100% (1)
- Namo Kaul Sir LecturesDokument57 SeitenNamo Kaul Sir LecturesAkshit Garg100% (1)
- Motion Along A Straight LineDokument3 SeitenMotion Along A Straight LineKrit JimenezNoch keine Bewertungen
- Summary - 01 PDFDokument3 SeitenSummary - 01 PDFImran MirzaNoch keine Bewertungen
- 2.01-Motion in A Straight Line-HWDokument2 Seiten2.01-Motion in A Straight Line-HWNirmal gkNoch keine Bewertungen
- As Level Physics Topic 3 Kinematics Lessons 1 2 WorksheetsDokument9 SeitenAs Level Physics Topic 3 Kinematics Lessons 1 2 Worksheetsapi-183882946Noch keine Bewertungen