Das könnte Ihnen auch gefallen
- Transiting Quasites As A Possible TechnosignatureDokument3 SeitenTransiting Quasites As A Possible TechnosignatureSangat BaikNoch keine Bewertungen
- Solar System Constraints On R GravityDokument10 SeitenSolar System Constraints On R GravitypsistNoch keine Bewertungen
- Flux Qubit On A Mesoscopic Nonsuperconducting RingDokument6 SeitenFlux Qubit On A Mesoscopic Nonsuperconducting Ringdaniela grandettNoch keine Bewertungen
- A New Method of Determining The Inclination Angle in Interacting BinariesDokument13 SeitenA New Method of Determining The Inclination Angle in Interacting BinariesPiash AnikNoch keine Bewertungen
- Neutron StarsDokument27 SeitenNeutron StarsGaston GBNoch keine Bewertungen
- Structure and Properties of Liquid Metals 1: 2.1 InteractionDokument6 SeitenStructure and Properties of Liquid Metals 1: 2.1 InteractionAnonymous T02GVGzBNoch keine Bewertungen
- Researcharticle: Sergei P. Kruchinin, Arkadiy A. Zolotovsky, and Hyun-Tak KimDokument4 SeitenResearcharticle: Sergei P. Kruchinin, Arkadiy A. Zolotovsky, and Hyun-Tak Kim66666666666666-35305Noch keine Bewertungen
- GibbonsManton-1995-The Moduli Space MetricDokument12 SeitenGibbonsManton-1995-The Moduli Space MetricGuido FranchettiNoch keine Bewertungen
- Justify The Answers To Each of The Following ExercisesDokument1 SeiteJustify The Answers To Each of The Following ExercisesfranciscoNoch keine Bewertungen
- Lee 1999 ApJ 526 178Dokument22 SeitenLee 1999 ApJ 526 178Rafael S. MoraesNoch keine Bewertungen
- Unifying X-Ray Scaling Relations From Galaxies To ClustersDokument22 SeitenUnifying X-Ray Scaling Relations From Galaxies To ClustersmkpsrtmNoch keine Bewertungen
- Electron-Positron Bremsstrahlung and Pair Creation in Very High Magnetic FieldsDokument10 SeitenElectron-Positron Bremsstrahlung and Pair Creation in Very High Magnetic FieldsBayer MitrovicNoch keine Bewertungen
- Predicting Ly Escape Fractions With A Simple ObservableDokument9 SeitenPredicting Ly Escape Fractions With A Simple ObservableFábio DuarteNoch keine Bewertungen
- Effective String Theory Revisited: Sergei Dubovsky, Raphael Flauger and Victor GorbenkoDokument22 SeitenEffective String Theory Revisited: Sergei Dubovsky, Raphael Flauger and Victor GorbenkopranavNoch keine Bewertungen
- Final ProjectDokument9 SeitenFinal ProjectAronNoch keine Bewertungen
- Brane World of Warp Geometry: An Introductory ReviewDokument29 SeitenBrane World of Warp Geometry: An Introductory ReviewRoss WrightNoch keine Bewertungen
- Universal Relations For Quasinormal Modes of Neutron Stars in R GravityDokument26 SeitenUniversal Relations For Quasinormal Modes of Neutron Stars in R GravityALEJANDRO PEREZ SUAREZNoch keine Bewertungen
- Jupiter's Magnetosphere PDFDokument24 SeitenJupiter's Magnetosphere PDFSriramNoch keine Bewertungen
- 5Dokument2 Seiten5ATHUL A V 2247110Noch keine Bewertungen
- PPCF 372627 P 15Dokument16 SeitenPPCF 372627 P 15Alexei VasilievNoch keine Bewertungen
- Magnetic Monopoles, Fiber BundlesDokument11 SeitenMagnetic Monopoles, Fiber BundlesMojano De la MagdalenaNoch keine Bewertungen
- Neutron Stars in Scalar-Tensor Theories of Gravity and Catastrophe TheoryDokument10 SeitenNeutron Stars in Scalar-Tensor Theories of Gravity and Catastrophe TheoryMatejaBoskovicNoch keine Bewertungen
- Acmcr v10 1930Dokument3 SeitenAcmcr v10 1930Annals of Clinical and Medical Case ReportsNoch keine Bewertungen
- 1Dokument12 Seiten1edo hangukoNoch keine Bewertungen
- 1 Current ScienceDokument6 Seiten1 Current SciencekapiloberaiNoch keine Bewertungen
- Continued Gravitational CollapseDokument5 SeitenContinued Gravitational Collapseblabatut100% (1)
- Charge DensityDokument9 SeitenCharge Densityivan_jeba7626Noch keine Bewertungen
- Mannheim and O'Brien - 2013 - Galactic Rotation Curves in Conformal GravityDokument15 SeitenMannheim and O'Brien - 2013 - Galactic Rotation Curves in Conformal GravityvdbNoch keine Bewertungen
- The Theory of Alpha Decay: Tristan H UbschDokument15 SeitenThe Theory of Alpha Decay: Tristan H Ubschlokpati22mishra4134Noch keine Bewertungen
- Tamar Faran and Re'Em Sari: Draft Version July 8, 2022 Typeset Using L Tex Twocolumn Style in Aastex63Dokument25 SeitenTamar Faran and Re'Em Sari: Draft Version July 8, 2022 Typeset Using L Tex Twocolumn Style in Aastex63KaleNoch keine Bewertungen
- 5209: A Low-Mass Bare Strange Star?: R. X. XuDokument12 Seiten5209: A Low-Mass Bare Strange Star?: R. X. XuOnur BenliNoch keine Bewertungen
- Relativistic Numerical Model For Close Neutron-Star BinariesDokument15 SeitenRelativistic Numerical Model For Close Neutron-Star BinariesJulian MonteroNoch keine Bewertungen
- Alpha DecayDokument16 SeitenAlpha DecaypankajNoch keine Bewertungen
- Lecture 13Dokument14 SeitenLecture 13CainãNoch keine Bewertungen
- Lattimer Prakash NS-EOSDokument51 SeitenLattimer Prakash NS-EOSJose CrawfordNoch keine Bewertungen
- Published - A9 - 11 - 115207Dokument16 SeitenPublished - A9 - 11 - 115207aernestNoch keine Bewertungen
- Raman 04Dokument43 SeitenRaman 04Surender DilipNoch keine Bewertungen
- Lecture 7 - Rapidity and PseudorapidityDokument8 SeitenLecture 7 - Rapidity and PseudorapidityDEEPARNA BHATTACHARYYANoch keine Bewertungen
- The Theory of Alpha Decay: Term PaperDokument16 SeitenThe Theory of Alpha Decay: Term PaperDarshan BhansaliNoch keine Bewertungen
- Chapter 11. Angular Momentum: General TheoryDokument32 SeitenChapter 11. Angular Momentum: General TheoryATP_101Noch keine Bewertungen
- Anderson 2000 0146Dokument19 SeitenAnderson 2000 0146Particle Beam Physics LabNoch keine Bewertungen
- V. Kashyap Et Al - MACHOs and The Diffuse X-Ray BackgroundDokument13 SeitenV. Kashyap Et Al - MACHOs and The Diffuse X-Ray BackgroundGylkinnNoch keine Bewertungen
- M. P. Hertzberg, S. V. Vladimirov and N. F. Cramer - Rotational Modes of Oscillation of Rodlike Dust Grains in A PlasmaDokument9 SeitenM. P. Hertzberg, S. V. Vladimirov and N. F. Cramer - Rotational Modes of Oscillation of Rodlike Dust Grains in A PlasmaDeez34PNoch keine Bewertungen
- Dynamics of Relativistic Electrons in Non-Uniform Magnetic Fields and Its Applications in Quantum Computing and AstrophysicsDokument12 SeitenDynamics of Relativistic Electrons in Non-Uniform Magnetic Fields and Its Applications in Quantum Computing and AstrophysicsMaher Al oboodyNoch keine Bewertungen
- Spectral Properties, Generation Order Parameters, and Luminosities For Spin-Powered X-Ray PulsarsDokument7 SeitenSpectral Properties, Generation Order Parameters, and Luminosities For Spin-Powered X-Ray PulsarsEdward PittsNoch keine Bewertungen
- Chapter TwoDokument30 SeitenChapter TwoabdallaNoch keine Bewertungen
- 10 1 1 756 5110Dokument21 Seiten10 1 1 756 5110Gligor IlievNoch keine Bewertungen
- Pahlavani2012 (Bueno)Dokument6 SeitenPahlavani2012 (Bueno)Educación GratisNoch keine Bewertungen
- Super SolidsDokument5 SeitenSuper SolidsJuan BustamanteNoch keine Bewertungen
- Lecture18 GalacticDynamics&Evolution2019 PDFDokument24 SeitenLecture18 GalacticDynamics&Evolution2019 PDFSagar RawalNoch keine Bewertungen
- Shoot The MoonDokument9 SeitenShoot The MoonVitor ErmaniNoch keine Bewertungen
- Phys PrincipDokument34 SeitenPhys PrincipTam Jun HuiNoch keine Bewertungen
- Spinning of Particles in Schwarzschild-de-Sitter and Schwarzschild-Anti-de-Sitter Space-Times With Effective Cosmological Constant'Dokument5 SeitenSpinning of Particles in Schwarzschild-de-Sitter and Schwarzschild-Anti-de-Sitter Space-Times With Effective Cosmological Constant'VelveetNoch keine Bewertungen
- Late Time Cosmological Phase Transition and Galactic Halo As Bose-LiquidDokument4 SeitenLate Time Cosmological Phase Transition and Galactic Halo As Bose-LiquidJ Christian OdehnalNoch keine Bewertungen
- Gravitational/electromagnetic Conversion Scattering On Fixed Charges in The Born ApproximationDokument7 SeitenGravitational/electromagnetic Conversion Scattering On Fixed Charges in The Born ApproximationShahid KhanNoch keine Bewertungen
- 3 PG INORGANIC 14 Nov 21 156 1Dokument160 Seiten3 PG INORGANIC 14 Nov 21 156 1Dhavanesan DevanesanNoch keine Bewertungen
- Subject Headings: Gravitation - Radiation Mechanisms: General - Relativity - Stars: Neutron - (Stars:)Dokument4 SeitenSubject Headings: Gravitation - Radiation Mechanisms: General - Relativity - Stars: Neutron - (Stars:)G4 626Noch keine Bewertungen
- 1202 0565 PDFDokument11 Seiten1202 0565 PDFyouroldfriend23Noch keine Bewertungen
- Relativistic Pendulum and The Weak Equivalence PriDokument11 SeitenRelativistic Pendulum and The Weak Equivalence PriVatsalNoch keine Bewertungen
- Quantum Theory and The Electronic Structure of AtomsDokument17 SeitenQuantum Theory and The Electronic Structure of AtomsSalama NaumanNoch keine Bewertungen
- Full Report Kinematic ViscosityDokument11 SeitenFull Report Kinematic ViscosityKyle Pong100% (1)
- Chapter 4 Slope Stability PDFDokument40 SeitenChapter 4 Slope Stability PDFp130324Noch keine Bewertungen
- Mechanical EngineeringDokument9 SeitenMechanical EngineeringbilqistazNoch keine Bewertungen
- Jam 14Dokument12 SeitenJam 14Udaibir PradhanNoch keine Bewertungen
- APM2018Dokument26 SeitenAPM2018Prashant GuptaNoch keine Bewertungen
- Chapter Two: Pipe Flow Hydraulics: Hydraulics-II Lecture NotesDokument27 SeitenChapter Two: Pipe Flow Hydraulics: Hydraulics-II Lecture NotesErmiyas AlhegnNoch keine Bewertungen
- NFEM Ch01 PDFDokument15 SeitenNFEM Ch01 PDFmadhuNoch keine Bewertungen
- Chapter 1: Fourier Equation and Thermal ConductivityDokument19 SeitenChapter 1: Fourier Equation and Thermal ConductivityDiptoNoch keine Bewertungen
- Flywheel ExperimentDokument8 SeitenFlywheel ExperimentSanil Khinchi100% (1)
- DM M M DT: 2.06 Equation Sheet For Quiz 2 (Spring 2013)Dokument3 SeitenDM M M DT: 2.06 Equation Sheet For Quiz 2 (Spring 2013)Jimmy CarranzaNoch keine Bewertungen
- Dog Leg SeverityDokument7 SeitenDog Leg Severitymadonnite3781Noch keine Bewertungen
- Subsurface and Seismic MethodsDokument202 SeitenSubsurface and Seismic MethodsAli SulimanNoch keine Bewertungen
- Literature ReviewDokument29 SeitenLiterature ReviewAzmil Fishol67% (3)
- REDUCTOR PLANETARIO C-C-Gear-BoxDokument2 SeitenREDUCTOR PLANETARIO C-C-Gear-BoxJosé ÁvilaNoch keine Bewertungen
- Lecture 3 - Mechanical, Electrical Thermal PropertiesDokument88 SeitenLecture 3 - Mechanical, Electrical Thermal PropertiesHafizatul AqmarNoch keine Bewertungen
- Chapter 4: Fluid Kinematics: Eric G. PatersonDokument34 SeitenChapter 4: Fluid Kinematics: Eric G. PatersonSupriyo NahaNoch keine Bewertungen
- Grade 12 Learners GuideDokument51 SeitenGrade 12 Learners GuidesaneleNoch keine Bewertungen
- Surface Defects: Grain Boundaries External Surfaces Stacking FaultsDokument14 SeitenSurface Defects: Grain Boundaries External Surfaces Stacking FaultsAjeshSomanPulladNoch keine Bewertungen
- 2018 Theme 4c Kinematics Thrust BlocksDokument47 Seiten2018 Theme 4c Kinematics Thrust BlocksAclaire ChamussaNoch keine Bewertungen
- Magnetic Resonance Imaging (MRI) : Physics Lectures For ResidentsDokument41 SeitenMagnetic Resonance Imaging (MRI) : Physics Lectures For ResidentsLajja Parikh PatelNoch keine Bewertungen
- Influence Lines For Statically Determinate StructuresDokument196 SeitenInfluence Lines For Statically Determinate StructuresMvg Net100% (1)
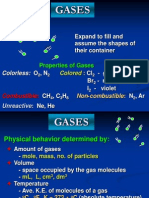
- GasesDokument34 SeitenGasesPaul Jeremiah Serrano NarvaezNoch keine Bewertungen
- Gyro Compass The Free GyroscopeDokument7 SeitenGyro Compass The Free GyroscopeJJohn GGnanavelu100% (2)
- Distance and Velocity Time Graphs Gizmo Student Exploration SheetDokument10 SeitenDistance and Velocity Time Graphs Gizmo Student Exploration SheetReem ShakirNoch keine Bewertungen
- Classical Mechanics MITDokument199 SeitenClassical Mechanics MITRavi RoyNoch keine Bewertungen
- Sheet (3) Linear MomentumDokument12 SeitenSheet (3) Linear MomentumABDELRHMAN ALINoch keine Bewertungen
- 10 Book PDFDokument226 Seiten10 Book PDFayesh aldiriNoch keine Bewertungen
- A Detail Review On Vibratory Bowl Feeder: Prof. S.B. Pawar, Shubham G Dake, Archana J Gadkari, Ranjit D KumbharDokument5 SeitenA Detail Review On Vibratory Bowl Feeder: Prof. S.B. Pawar, Shubham G Dake, Archana J Gadkari, Ranjit D KumbharFekadu TegegneNoch keine Bewertungen
- Dynamics Homework 4Dokument6 SeitenDynamics Homework 4Kelly Reardon100% (1)
- A Beginner's Guide to Constructing the Universe: The Mathematical Archetypes of Nature, Art, and ScienceVon EverandA Beginner's Guide to Constructing the Universe: The Mathematical Archetypes of Nature, Art, and ScienceBewertung: 4 von 5 Sternen4/5 (51)
- Knocking on Heaven's Door: How Physics and Scientific Thinking Illuminate the Universe and the Modern WorldVon EverandKnocking on Heaven's Door: How Physics and Scientific Thinking Illuminate the Universe and the Modern WorldBewertung: 3.5 von 5 Sternen3.5/5 (64)
- Under Alien Skies: A Sightseer's Guide to the UniverseVon EverandUnder Alien Skies: A Sightseer's Guide to the UniverseBewertung: 4.5 von 5 Sternen4.5/5 (17)
- When the Heavens Went on Sale: The Misfits and Geniuses Racing to Put Space Within ReachVon EverandWhen the Heavens Went on Sale: The Misfits and Geniuses Racing to Put Space Within ReachBewertung: 3.5 von 5 Sternen3.5/5 (6)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (1108)
- A Brief History of Time: From the Big Bang to Black HolesVon EverandA Brief History of Time: From the Big Bang to Black HolesBewertung: 4 von 5 Sternen4/5 (2193)
- When the Earth Had Two Moons: Cannibal Planets, Icy Giants, Dirty Comets, Dreadful Orbits, and the Origins of the Night SkyVon EverandWhen the Earth Had Two Moons: Cannibal Planets, Icy Giants, Dirty Comets, Dreadful Orbits, and the Origins of the Night SkyBewertung: 3 von 5 Sternen3/5 (7)
- Darwin's Doubt: The Explosive Origin of Animal Life and the Case for Intelligent DesignVon EverandDarwin's Doubt: The Explosive Origin of Animal Life and the Case for Intelligent DesignBewertung: 4 von 5 Sternen4/5 (19)
- Darwin's Doubt: The Explosive Origin of Animal Life and the Case for Intelligent DesignVon EverandDarwin's Doubt: The Explosive Origin of Animal Life and the Case for Intelligent DesignBewertung: 4.5 von 5 Sternen4.5/5 (39)
- The End of Everything: (Astrophysically Speaking)Von EverandThe End of Everything: (Astrophysically Speaking)Bewertung: 4.5 von 5 Sternen4.5/5 (157)
- The Creator and the Cosmos: How the Latest Scientific Discoveries Reveal GodVon EverandThe Creator and the Cosmos: How the Latest Scientific Discoveries Reveal GodBewertung: 5 von 5 Sternen5/5 (4)
- Dark Matter & Dark Energy: The Hidden 95% of the UniverseVon EverandDark Matter & Dark Energy: The Hidden 95% of the UniverseBewertung: 4.5 von 5 Sternen4.5/5 (33)
- The Book of the Moon: A Guide to Our Closest NeighborVon EverandThe Book of the Moon: A Guide to Our Closest NeighborBewertung: 4.5 von 5 Sternen4.5/5 (11)
- The Story of Gaia: The Big Breath and the Evolutionary Journey of Our Conscious PlanetVon EverandThe Story of Gaia: The Big Breath and the Evolutionary Journey of Our Conscious PlanetNoch keine Bewertungen
- Believing Is Seeing: A Physicist Explains How Science Shattered His Atheism and Revealed the Necessity of FaithVon EverandBelieving Is Seeing: A Physicist Explains How Science Shattered His Atheism and Revealed the Necessity of FaithBewertung: 5 von 5 Sternen5/5 (32)
- Alien Oceans: The Search for Life in the Depths of SpaceVon EverandAlien Oceans: The Search for Life in the Depths of SpaceBewertung: 4.5 von 5 Sternen4.5/5 (26)
- Cosmos and Psyche: Intimations of a New World ViewVon EverandCosmos and Psyche: Intimations of a New World ViewBewertung: 5 von 5 Sternen5/5 (7)
- The Fermi Paradox: The History and Legacy of the Famous Debate over the Existence of AliensVon EverandThe Fermi Paradox: The History and Legacy of the Famous Debate over the Existence of AliensBewertung: 4.5 von 5 Sternen4.5/5 (5)
- Chiron, Pholus and Nessus: To the Edge and BeyondVon EverandChiron, Pholus and Nessus: To the Edge and BeyondBewertung: 5 von 5 Sternen5/5 (5)
- Alien Earths: The New Science of Planet Hunting in the CosmosVon EverandAlien Earths: The New Science of Planet Hunting in the CosmosBewertung: 4 von 5 Sternen4/5 (1)
- Black Holes: The Key to Understanding the UniverseVon EverandBlack Holes: The Key to Understanding the UniverseBewertung: 4.5 von 5 Sternen4.5/5 (13)