Das könnte Ihnen auch gefallen
- Curvatura y longitud de arco en curvas espacialesDokument10 SeitenCurvatura y longitud de arco en curvas espacialesRey Esteban MisterioNoch keine Bewertungen
- TP4 - Cinemática de FluidosDokument7 SeitenTP4 - Cinemática de FluidosMoises VillarrealNoch keine Bewertungen
- Área de La Superficie de Revolución IIDokument15 SeitenÁrea de La Superficie de Revolución IIJannlyn ContramaestreNoch keine Bewertungen
- Aproximación de funciones mediante sumas de Fourier y error cuadrático mínimo (ECMDokument27 SeitenAproximación de funciones mediante sumas de Fourier y error cuadrático mínimo (ECMAlejandro Delgado ChaconNoch keine Bewertungen
- Tarea3 JeffersonDokument10 SeitenTarea3 JeffersonJefferson Portilla MayorNoch keine Bewertungen
- Ejercicios Resueltos Derivadas PDFDokument5 SeitenEjercicios Resueltos Derivadas PDFDoris SfNoch keine Bewertungen
- Ejercicios resueltos de diferenciaciónDokument4 SeitenEjercicios resueltos de diferenciaciónSoniaNoch keine Bewertungen
- Diferencial Ejemplos 1Dokument12 SeitenDiferencial Ejemplos 1Miguel Angel Salguera SanchezNoch keine Bewertungen
- Metodo de ArandelesDokument8 SeitenMetodo de Arandelessebastian minaNoch keine Bewertungen
- Extrapolación de Richardson PDFDokument5 SeitenExtrapolación de Richardson PDFANDRES FELIPE CARDOZO CASTILLONoch keine Bewertungen
- EsferaDokument15 SeitenEsferaGabriela Gemio Lujan50% (2)
- OrtizRomero David M18S4PIDokument4 SeitenOrtizRomero David M18S4PIDavid Ortiz Romero100% (1)
- Solución de problemas de físicaDokument3 SeitenSolución de problemas de físicaSergio HuallpaNoch keine Bewertungen
- Ejercicios Resueltos PresaberesDokument8 SeitenEjercicios Resueltos PresaberesNahum GutierrezNoch keine Bewertungen
- Unidad 3 Tarea 3 Ejercicios Letra CDokument5 SeitenUnidad 3 Tarea 3 Ejercicios Letra CNelfrey TaracheNoch keine Bewertungen
- Funciones Inversas 2Dokument9 SeitenFunciones Inversas 2Naomi VegagNoch keine Bewertungen
- TAREA4Dokument20 SeitenTAREA4Yeison DazaNoch keine Bewertungen
- Teorema SDokument5 SeitenTeorema SFrancisco NievaNoch keine Bewertungen
- Em 07 Emcved U2 A5 Hugo BenítezDokument13 SeitenEm 07 Emcved U2 A5 Hugo BenítezHugo Alfredo BenitezNoch keine Bewertungen
- Sumatoria, Propiedad Telescópica y Sus Aplicaciones COMPLETODokument12 SeitenSumatoria, Propiedad Telescópica y Sus Aplicaciones COMPLETOJoaquina Inostroza100% (1)
- Solución Taller Sumativo 3 P117cuvDokument6 SeitenSolución Taller Sumativo 3 P117cuvKevin BajañaNoch keine Bewertungen
- Solución:: Demostrar La Ecuación de Navier Stokes: +Dokument4 SeitenSolución:: Demostrar La Ecuación de Navier Stokes: +Eliseo FloresNoch keine Bewertungen
- AgustínMartos TareaSemana6Dokument7 SeitenAgustínMartos TareaSemana6Diego MartinezNoch keine Bewertungen
- Tarea Analisis de Armonicos Vicente AlvarezDokument6 SeitenTarea Analisis de Armonicos Vicente AlvarezVICENTE LEONARDO ALVAREZ CHAVEZNoch keine Bewertungen
- Procesamiento Digital de Señales Planificar Metodos y Herramientas para El Diseño de Filtros DigitalesDokument4 SeitenProcesamiento Digital de Señales Planificar Metodos y Herramientas para El Diseño de Filtros Digitalesalexis pedrozaNoch keine Bewertungen
- Procesamiento Digital de Señales Transformada Z Filtro IIR Y FIR.Dokument8 SeitenProcesamiento Digital de Señales Transformada Z Filtro IIR Y FIR.alexis pedrozaNoch keine Bewertungen
- Trabajo 1 UnadDokument4 SeitenTrabajo 1 UnadJose BegambreNoch keine Bewertungen
- 2023 SNL Clase - 1Dokument18 Seiten2023 SNL Clase - 1juanpenaloza97Noch keine Bewertungen
- Clase 08Dokument7 SeitenClase 08joelNoch keine Bewertungen
- Tarea 1 Vectores Matrices y Determinantes Ejercicio 2 y Ejercicio 3Dokument4 SeitenTarea 1 Vectores Matrices y Determinantes Ejercicio 2 y Ejercicio 3Eriika IpiiaNoch keine Bewertungen
- Evaluación Parcial A - CD - 2024 00 - SOLUCIONARIODokument2 SeitenEvaluación Parcial A - CD - 2024 00 - SOLUCIONARIODANIEL DAVID GRACIAN GONZALESNoch keine Bewertungen
- DronnDokument7 SeitenDronnHenry CarrascoNoch keine Bewertungen
- Prev.3 Ing - Control 1609A Guzman Alcantara Miguel GonzaloDokument9 SeitenPrev.3 Ing - Control 1609A Guzman Alcantara Miguel GonzaloRafael Garcia IbarraNoch keine Bewertungen
- Taller PPDokument1 SeiteTaller PP...Noch keine Bewertungen
- Clase Extra 1Dokument8 SeitenClase Extra 1noeNoch keine Bewertungen
- EjerciciosDokument20 SeitenEjerciciosAndreaNoch keine Bewertungen
- Fase 3 Algebra LinealDokument12 SeitenFase 3 Algebra LinealEdinson Medina RiveraNoch keine Bewertungen
- Solucionario Taller 7 EconometríaDokument14 SeitenSolucionario Taller 7 EconometríaKarla Milena Pedroza OspinaNoch keine Bewertungen
- Grupo 1 - Correción - Exámen Primer CicloDokument5 SeitenGrupo 1 - Correción - Exámen Primer CicloJesus Alessandro VeraNoch keine Bewertungen
- Ejercicios de Ingenieria EconómicaDokument14 SeitenEjercicios de Ingenieria EconómicaSanabria David75% (4)
- Guión de Clase3Dokument12 SeitenGuión de Clase3Kevin PinedaNoch keine Bewertungen
- Solución Taller Formativo 4 P113Dokument5 SeitenSolución Taller Formativo 4 P113Kevin BajañaNoch keine Bewertungen
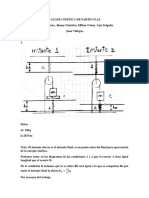
- Taller Cinética de PartículasDokument8 SeitenTaller Cinética de Partículasmilton david ochoa madridNoch keine Bewertungen
- Integración Por Gauss LegendreDokument15 SeitenIntegración Por Gauss LegendreAlejandro VillamarinNoch keine Bewertungen
- Predicción Del Comportamiento de Yacimientos Con Empuje de Gas Disuelto Liberado y Segregado GravitacionalmenteDokument3 SeitenPredicción Del Comportamiento de Yacimientos Con Empuje de Gas Disuelto Liberado y Segregado GravitacionalmenteJefferson VillegasNoch keine Bewertungen
- VOL Lon Dis-Cas Noviembre 6-2023 - 02Dokument114 SeitenVOL Lon Dis-Cas Noviembre 6-2023 - 02Aarón García MarchinoNoch keine Bewertungen
- Ec. de Orden N Con Coef. Var.Dokument2 SeitenEc. de Orden N Con Coef. Var.Marcelo Herrera salazarNoch keine Bewertungen
- 9° Sesión Geo B 22-07-2022Dokument9 Seiten9° Sesión Geo B 22-07-2022Angelo AlbujarNoch keine Bewertungen
- POLINOMIOS ActividadesDokument3 SeitenPOLINOMIOS ActividadesMili JacobiNoch keine Bewertungen
- Clase 3 Ecuaciones Exactas y No ExactasDokument6 SeitenClase 3 Ecuaciones Exactas y No ExactasShinya TanakaNoch keine Bewertungen
- Guión 9Dokument11 SeitenGuión 9Alejandro QuintanillaNoch keine Bewertungen
- Procesamiento Digital de Señales, Filtros, Transformada Z.Dokument6 SeitenProcesamiento Digital de Señales, Filtros, Transformada Z.alexis pedrozaNoch keine Bewertungen
- ECUACIÓN GENERAL Y VECTORIAL DE LA PARÁBOLA 1 Sin FondoDokument23 SeitenECUACIÓN GENERAL Y VECTORIAL DE LA PARÁBOLA 1 Sin FondoRafael OsorioNoch keine Bewertungen
- Filtro FIR Y IIR, Analisis MatematicoDokument8 SeitenFiltro FIR Y IIR, Analisis Matematicoalexis pedrozaNoch keine Bewertungen
- Ecuaciones DiferencialesDokument12 SeitenEcuaciones DiferencialesorecaNoch keine Bewertungen
- Práctica # 5 Señales y SistemasDokument7 SeitenPráctica # 5 Señales y SistemasRemigio HaroNoch keine Bewertungen
- Simulaciones P1Dokument23 SeitenSimulaciones P1KevinNoch keine Bewertungen
- Segundo Parcial Balance de EnergiaDokument7 SeitenSegundo Parcial Balance de EnergiaMABEl ALEJANDRA CONDORI GUARACHINoch keine Bewertungen
- Ensayo Sobre Técnicas de Manejo Al ClienteDokument4 SeitenEnsayo Sobre Técnicas de Manejo Al ClienteArturo Olguín MoralesNoch keine Bewertungen
- Contextualizacion (S)Dokument7 SeitenContextualizacion (S)Arturo Olguín MoralesNoch keine Bewertungen
- Reporte de Práctica 1 - Identificación de Los MCIADokument11 SeitenReporte de Práctica 1 - Identificación de Los MCIAArturo Olguín MoralesNoch keine Bewertungen
- Tarea 5. Familia de PerfilesDokument3 SeitenTarea 5. Familia de PerfilesArturo Olguín MoralesNoch keine Bewertungen
- Mercadotecnia-Marketing (Scribd)Dokument2 SeitenMercadotecnia-Marketing (Scribd)Arturo Olguín MoralesNoch keine Bewertungen
- Identificación de Los MCIADokument13 SeitenIdentificación de Los MCIAArturo Olguín MoralesNoch keine Bewertungen
- Tarea 5. Familia de PerfilesDokument3 SeitenTarea 5. Familia de PerfilesArturo Olguín MoralesNoch keine Bewertungen
- Contextualizacion (S)Dokument7 SeitenContextualizacion (S)Arturo Olguín MoralesNoch keine Bewertungen
- Presentación Técnica AIDADokument49 SeitenPresentación Técnica AIDAArturo Olguín MoralesNoch keine Bewertungen
- Áreas de Desarrollo AeronáuticoDokument14 SeitenÁreas de Desarrollo AeronáuticoArturo Olguín MoralesNoch keine Bewertungen
- Energia Mecanica-AllisonDokument5 SeitenEnergia Mecanica-AllisonAngel CortezNoch keine Bewertungen
- Geoquímica y Mineralogía de Los ElementosDokument67 SeitenGeoquímica y Mineralogía de Los ElementosRicardoRamirezNoch keine Bewertungen
- Reacondicionamiento de Alabes Directrices de Una TurbinaDokument59 SeitenReacondicionamiento de Alabes Directrices de Una TurbinaCristian MoratayaNoch keine Bewertungen
- Practica de La CoordinadoraDokument9 SeitenPractica de La CoordinadoraAXALONSONoch keine Bewertungen
- Caidas y RapidasDokument14 SeitenCaidas y RapidasMax Chavez OchavanoNoch keine Bewertungen
- Metodología ProbitDokument5 SeitenMetodología ProbitAna Belén Véliz Toledo100% (1)
- Informe Pintado Grating - SSPC - ProdiseDokument5 SeitenInforme Pintado Grating - SSPC - Prodisevicvarg3235Noch keine Bewertungen
- Vias de ChispasDokument7 SeitenVias de ChispasMarkNoch keine Bewertungen
- Escala FIM evalua independencia tras lesión medularDokument4 SeitenEscala FIM evalua independencia tras lesión medularManuel Cuevas EspinozaNoch keine Bewertungen
- Cristobal RivasDokument103 SeitenCristobal RivasKevin Ortiz CollaoNoch keine Bewertungen
- Sistemas de Control de Respuesta Sísmica en EdificacionesDokument18 SeitenSistemas de Control de Respuesta Sísmica en EdificacionesBrian Machicado MirandaNoch keine Bewertungen
- PROBLEMAS PROPUESTOS UNIDAD 3b PDFDokument4 SeitenPROBLEMAS PROPUESTOS UNIDAD 3b PDFFlor De León0% (1)
- Sistema PovDokument4 SeitenSistema PovCristian EscobarNoch keine Bewertungen
- Reflexión de la luz: concepto, leyes y tiposDokument9 SeitenReflexión de la luz: concepto, leyes y tiposCatalina Katai Catadora AriasNoch keine Bewertungen
- Laboratorio 04 Resistencia ElectricaDokument27 SeitenLaboratorio 04 Resistencia Electricamariano ernestoNoch keine Bewertungen
- Funciones Proporcionalidad Inversa 2Dokument2 SeitenFunciones Proporcionalidad Inversa 2michingonNoch keine Bewertungen
- Resistencia eléctrica: qué es y código de coloresDokument9 SeitenResistencia eléctrica: qué es y código de coloresArvey MedinaNoch keine Bewertungen
- Variadores para Motores de CCDokument5 SeitenVariadores para Motores de CCEmmanuel Leon UrquizuNoch keine Bewertungen
- Practica #3Dokument11 SeitenPractica #3Karin Angeles0% (2)
- Funciones básicas y transformaciones matemáticasDokument12 SeitenFunciones básicas y transformaciones matemáticasVickyAyusoNoch keine Bewertungen
- Instrumentos de MediciónDokument5 SeitenInstrumentos de MediciónCarmen CastroNoch keine Bewertungen
- Modulacion PM y FMDokument15 SeitenModulacion PM y FMFelipe Olarte BeltránNoch keine Bewertungen
- Dirigida 04Dokument12 SeitenDirigida 04Milton César Ochoa MogollónNoch keine Bewertungen
- Informe Técnico en Condiciones PreviasDokument10 SeitenInforme Técnico en Condiciones PreviasAlvaro Valda Peñaloza100% (1)
- Tecnicas de Conteo y Teoremas de ProbabilidadesDokument23 SeitenTecnicas de Conteo y Teoremas de ProbabilidadesNostra FutbolNoch keine Bewertungen
- Ronaldo Roman YllaDokument6 SeitenRonaldo Roman YllaRonaldo Román YllaNoch keine Bewertungen
- Práctica 2Dokument3 SeitenPráctica 2GUSTAVO ADOLFO SIQUEIROS VALENZUELANoch keine Bewertungen
- Procedimiento Pull OutDokument27 SeitenProcedimiento Pull OutPatrick Jordan Araya JuarezNoch keine Bewertungen
- 3 Analisis DimensionalDokument22 Seiten3 Analisis DimensionalEyisela Elisabeth Pinchao CalderónNoch keine Bewertungen
- La Matriz Etérea y Emociones Negativas Estancadas en Los Órganos Del Cuerp1Dokument2 SeitenLa Matriz Etérea y Emociones Negativas Estancadas en Los Órganos Del Cuerp1Josafat Rangel100% (1)