Das könnte Ihnen auch gefallen
- Enviando Denso Mitsubishi l200 Common RailDokument55 SeitenEnviando Denso Mitsubishi l200 Common Railisrael machicado calle100% (3)
- Chapter 2 Project Management Section 2.1 Critical Path Method (CPM) Using Activity On Arrow Example 2.1 Black Eyed Peas (I)Dokument5 SeitenChapter 2 Project Management Section 2.1 Critical Path Method (CPM) Using Activity On Arrow Example 2.1 Black Eyed Peas (I)Michael BunyiNoch keine Bewertungen
- Construction Project Management (5th Yr. B.arch.) END SEMDokument2 SeitenConstruction Project Management (5th Yr. B.arch.) END SEMAtulGuptaNoch keine Bewertungen
- Gree-44814 09K 12K (LCLH)Dokument87 SeitenGree-44814 09K 12K (LCLH)MatyoJNoch keine Bewertungen
- 2007 Answer PDFDokument1 Seite2007 Answer PDFLe Huu HaiNoch keine Bewertungen
- Abb MCCDokument76 SeitenAbb MCCfridjatNoch keine Bewertungen
- PM401 - Final Exam Example - 20140728 - SolutionsDokument12 SeitenPM401 - Final Exam Example - 20140728 - SolutionsDiego Lozano ValleNoch keine Bewertungen
- Telephone Systems PDFDokument13 SeitenTelephone Systems PDFsorry2qaz67% (3)
- Class 6 Percentage: Answer The QuestionsDokument3 SeitenClass 6 Percentage: Answer The QuestionsnachNoch keine Bewertungen
- Experiment RedoxDokument6 SeitenExperiment RedoxJaaizah JaafarNoch keine Bewertungen
- Discrete Cosine Transform: Algorithms, Advantages, ApplicationsVon EverandDiscrete Cosine Transform: Algorithms, Advantages, ApplicationsNoch keine Bewertungen
- Economics Elasticity NotesDokument5 SeitenEconomics Elasticity NotesAvi FinkelsteinNoch keine Bewertungen
- Grade 6 Percentage: Answer The QuestionsDokument3 SeitenGrade 6 Percentage: Answer The QuestionsAnosha AsifNoch keine Bewertungen
- Project Crash SlideDokument26 SeitenProject Crash SlideAayush KoiralaNoch keine Bewertungen
- Assessment Task No. 5Dokument3 SeitenAssessment Task No. 5JyNoch keine Bewertungen
- ISE431 L3 3rDokument23 SeitenISE431 L3 3rjohnNoch keine Bewertungen
- Project Crashing AssignmentDokument3 SeitenProject Crashing AssignmentAbhilash RjNoch keine Bewertungen
- Project Data ClassDokument21 SeitenProject Data ClassSagnik SharangiNoch keine Bewertungen
- Solution: Activity Immediate Predecessors DurationDokument5 SeitenSolution: Activity Immediate Predecessors DurationherrajohnNoch keine Bewertungen
- Assignment 2Dokument8 SeitenAssignment 2Shameera TahilNoch keine Bewertungen
- Quesbank 270216063430Dokument4 SeitenQuesbank 270216063430Man C Is a SuksNoch keine Bewertungen
- Example Project ManagementDokument2 SeitenExample Project ManagementThanakrit LerdmatayakulNoch keine Bewertungen
- Assignment 3Dokument4 SeitenAssignment 3Mahmoud OmarNoch keine Bewertungen
- Revenu and Expenditure (In Million Rupees) of Four Companies P, Q, R and Sin 2015 Revenue ExpenditureDokument24 SeitenRevenu and Expenditure (In Million Rupees) of Four Companies P, Q, R and Sin 2015 Revenue ExpenditureGingka HaganeNoch keine Bewertungen
- E) Investors Demand Higher Expected Rates of Return From Stocks With Returns That Are VeryDokument4 SeitenE) Investors Demand Higher Expected Rates of Return From Stocks With Returns That Are Veryssunday giftNoch keine Bewertungen
- Ge 404 - Tutorial 6 0Dokument16 SeitenGe 404 - Tutorial 6 0dsdsasasadsdfswNoch keine Bewertungen
- Midterm ExamDokument2 SeitenMidterm ExamShameera TahilNoch keine Bewertungen
- 634bf52ec830520011eaa25d - ## - Insert NumberDokument6 Seiten634bf52ec830520011eaa25d - ## - Insert Numberindira nagNoch keine Bewertungen
- Act ID Description Predecessor Optm. (A) Most Likely (M) Pess. (B) T - eDokument5 SeitenAct ID Description Predecessor Optm. (A) Most Likely (M) Pess. (B) T - ejhosser andres jojoa calderonNoch keine Bewertungen
- Projectproposalon 10 MwsolarpvpowerplantDokument41 SeitenProjectproposalon 10 MwsolarpvpowerplantNaveenNoch keine Bewertungen
- Fin f12 SolDokument6 SeitenFin f12 SolNeda'a HamedNoch keine Bewertungen
- Transportation PracticalDokument3 SeitenTransportation PracticalSHIVEK GUPTANoch keine Bewertungen
- Mock Test: Sub.: Business Research Methods Paper Code:C-203Dokument7 SeitenMock Test: Sub.: Business Research Methods Paper Code:C-203aaaNoch keine Bewertungen
- 2024 Mock JEE Main 10 - SolutionsDokument17 Seiten2024 Mock JEE Main 10 - SolutionsAranyaman MohanNoch keine Bewertungen
- GAT Practice Test 10Dokument5 SeitenGAT Practice Test 10ibrahim mahmoudNoch keine Bewertungen
- Isen 615 HW - 10Dokument10 SeitenIsen 615 HW - 10Ronak RadadiyaNoch keine Bewertungen
- MS 4 Assigments ResitDokument5 SeitenMS 4 Assigments ResitjuanNoch keine Bewertungen
- Running Head: Chapter 13 ExercisesDokument7 SeitenRunning Head: Chapter 13 ExercisesluluNoch keine Bewertungen
- Proj MGMTDokument26 SeitenProj MGMTavantikaNoch keine Bewertungen
- Project 2 Stage 1 (Cost Crashing) TK10 Daniel Haque Bin WayneDokument5 SeitenProject 2 Stage 1 (Cost Crashing) TK10 Daniel Haque Bin WayneLearning everythingNoch keine Bewertungen
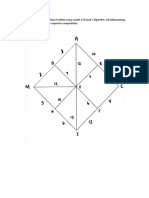
- Solve The Chinese Postman Problem Using Variant 2 of Guan's Algorithm. List Initial Pairings, Tested Cycles, and The Respective ComputationsDokument3 SeitenSolve The Chinese Postman Problem Using Variant 2 of Guan's Algorithm. List Initial Pairings, Tested Cycles, and The Respective ComputationsCIAN CARLO ANDRE TANNoch keine Bewertungen
- 14-CI-A7 - Version Anglaise - Novembre 2015Dokument7 Seiten14-CI-A7 - Version Anglaise - Novembre 2015Wael MaroukNoch keine Bewertungen
- 2007 AnswerDokument1 Seite2007 AnswerLe Huu HaiNoch keine Bewertungen
- Institute of Management Studies Devi Ahilya Vishwavidyalaya, Indore Mba (Executive) Semester Iii BATCH 2020-22 Operation Research Assignment - 1Dokument2 SeitenInstitute of Management Studies Devi Ahilya Vishwavidyalaya, Indore Mba (Executive) Semester Iii BATCH 2020-22 Operation Research Assignment - 1Xylem SolutionsNoch keine Bewertungen
- 5 PercentDokument16 Seiten5 PercentKuikoua KevinNoch keine Bewertungen
- Unit IV MCQDokument11 SeitenUnit IV MCQDrAbhishek SarafNoch keine Bewertungen
- Chp2 Soln Mar14Dokument7 SeitenChp2 Soln Mar14Nur AthirahNoch keine Bewertungen
- KKKH1133 Graphic Engineering SEMESTER 2 2020/2021 Individual ProjectDokument16 SeitenKKKH1133 Graphic Engineering SEMESTER 2 2020/2021 Individual ProjectNur Shukria Hidayah HiulNoch keine Bewertungen
- Exercise On CPM and PERTDokument4 SeitenExercise On CPM and PERTAli Kanso - NagadNoch keine Bewertungen
- Software Engineering Digital Assignment 1: NAME: Amitabh Mishra Reg - No: 18BCI0225Dokument12 SeitenSoftware Engineering Digital Assignment 1: NAME: Amitabh Mishra Reg - No: 18BCI0225Avk Aryan Vishant KulshreshthaNoch keine Bewertungen
- Operation Management Assignment 2Dokument4 SeitenOperation Management Assignment 2MELISSA WONG PAU YU -Noch keine Bewertungen
- R Programming AssignmentDokument3 SeitenR Programming AssignmentM sobrul IslamNoch keine Bewertungen
- Crashing ExampleDokument3 SeitenCrashing ExampleSaurabh ManralNoch keine Bewertungen
- Discussion5 1Dokument8 SeitenDiscussion5 1diristiNoch keine Bewertungen
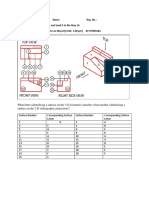
- What Letter (Identifying A Surface On The 3-D Isometric) Matches What Number (Identifying A Surface On The 2-D Orthographic Projection) ?Dokument1 SeiteWhat Letter (Identifying A Surface On The 3-D Isometric) Matches What Number (Identifying A Surface On The 2-D Orthographic Projection) ?Taha MohammadNoch keine Bewertungen
- Match 2d To The 3d Part of The ObjectDokument1 SeiteMatch 2d To The 3d Part of The ObjectTaha MohammadNoch keine Bewertungen
- All Normal All Crash Cycle 1 Cycle 2 Cycle 3 Cycle 4 Project Duration 18 9 15 12 10 9 Total Cost: 10999.99994 11900 10500 10000 10000 11900Dokument10 SeitenAll Normal All Crash Cycle 1 Cycle 2 Cycle 3 Cycle 4 Project Duration 18 9 15 12 10 9 Total Cost: 10999.99994 11900 10500 10000 10000 11900Sanjay TiwariNoch keine Bewertungen
- Expected Return On A One-Year Bond With An Adjustment For Default ProbabilityDokument83 SeitenExpected Return On A One-Year Bond With An Adjustment For Default ProbabilitySyed Ameer Ali ShahNoch keine Bewertungen
- Business Mathematics 13th Edition by Clendenen Salzman ISBN Test BankDokument31 SeitenBusiness Mathematics 13th Edition by Clendenen Salzman ISBN Test Banktheresa100% (23)
- University Ok Khartoum Faculty of Engineering Mechanical Engineering Department Engineering ManagementDokument4 SeitenUniversity Ok Khartoum Faculty of Engineering Mechanical Engineering Department Engineering ManagementElzubair EljaaliNoch keine Bewertungen
- CMPM Q2 SolutionDokument2 SeitenCMPM Q2 SolutionChristian Kyle BeltranNoch keine Bewertungen
- Recitation 2 PDFDokument3 SeitenRecitation 2 PDFiNoch keine Bewertungen
- LineBalance Problem PDFDokument8 SeitenLineBalance Problem PDFSai MuraliNoch keine Bewertungen
- Hidrolis 2018Dokument64 SeitenHidrolis 2018ShandyNoch keine Bewertungen
- Linear Programming and Resource Allocation ModelingVon EverandLinear Programming and Resource Allocation ModelingNoch keine Bewertungen
- Wide Band RF TransformersDokument13 SeitenWide Band RF Transformerskbdstl1Noch keine Bewertungen
- Module 1 - Advanced Computer ArchitectureDokument15 SeitenModule 1 - Advanced Computer ArchitectureDream CatcherNoch keine Bewertungen
- SpaceTrack 4000 CaprockDokument2 SeitenSpaceTrack 4000 CaprockVanessa ChingNoch keine Bewertungen
- MM3000 User ManualDokument11 SeitenMM3000 User ManualTiffany DacinoNoch keine Bewertungen
- The Learner Demonstrates Understanding of Media and Information Literacy (MIL) and MIL Related ConceptsDokument4 SeitenThe Learner Demonstrates Understanding of Media and Information Literacy (MIL) and MIL Related ConceptsJules MarcoNoch keine Bewertungen
- Technical Document E800 - BCN-A21171-931ADokument4 SeitenTechnical Document E800 - BCN-A21171-931ANandha gopalNoch keine Bewertungen
- Updates To ANSI-EASA AR100 2015 0Dokument3 SeitenUpdates To ANSI-EASA AR100 2015 0VILLANUEVA_DANIEL2064Noch keine Bewertungen
- Flow Control ValvesDokument2 SeitenFlow Control ValvesAnik FaisalNoch keine Bewertungen
- LTC 4041Dokument26 SeitenLTC 4041mar_barudjNoch keine Bewertungen
- Danalock V3 PDFDokument32 SeitenDanalock V3 PDFZvonko MesićNoch keine Bewertungen
- MD1D Evalmanual A1en - EvalBoardDokument8 SeitenMD1D Evalmanual A1en - EvalBoardS Puneeth Kumar100% (1)
- PG PC Oct NovDokument21 SeitenPG PC Oct NovTan Kien HockNoch keine Bewertungen
- Experiment-3 30KV Insulation TesterDokument4 SeitenExperiment-3 30KV Insulation TesterAbhinav SinhaNoch keine Bewertungen
- Technicolor Tc7200Dokument4 SeitenTechnicolor Tc7200grudva2Noch keine Bewertungen
- F40 Filmetrics SOP - REV DDokument7 SeitenF40 Filmetrics SOP - REV DsaranyaNoch keine Bewertungen
- TC-P50C2: 50 Inch Class 720p Plasma HDTVDokument95 SeitenTC-P50C2: 50 Inch Class 720p Plasma HDTVRonald CastellarNoch keine Bewertungen
- Analog Electronic Circuits (ECE 201)Dokument3 SeitenAnalog Electronic Circuits (ECE 201)Ankith Jai KrishnaNoch keine Bewertungen
- Frequency Diverse MIMO Techniques For RadarDokument22 SeitenFrequency Diverse MIMO Techniques For RadarNamith DevadigaNoch keine Bewertungen
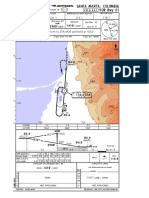
- Santa Marta, Colombia SKSM/SMR VOR Rwy 01: 13-1 119.1 118.7 VOR Cat A, B & C Simon Bolivar Intl 125.0 127.7Dokument1 SeiteSanta Marta, Colombia SKSM/SMR VOR Rwy 01: 13-1 119.1 118.7 VOR Cat A, B & C Simon Bolivar Intl 125.0 127.7Guillermo Serrano KelcyNoch keine Bewertungen
- Ieee Standard 1016Dokument3 SeitenIeee Standard 1016Juan Carlos Cabrera GudiñoNoch keine Bewertungen
- Rancang Bangun Prototipe Sistem Kendali Iron Removal Filter (Irf) Pada Unit Pengolahan Air Bersih Berbasis PLCDokument8 SeitenRancang Bangun Prototipe Sistem Kendali Iron Removal Filter (Irf) Pada Unit Pengolahan Air Bersih Berbasis PLCaulyaakmala24Noch keine Bewertungen
- Bab 1 (Material Science)Dokument9 SeitenBab 1 (Material Science)Muhd AriffNoch keine Bewertungen
- 1601 0256 Aj3Dokument68 Seiten1601 0256 Aj3muayid al omaryNoch keine Bewertungen
- Coms Part 1Dokument11 SeitenComs Part 1Marinjal TomadhyayNoch keine Bewertungen
- Voice Over IP (VoIP)Dokument54 SeitenVoice Over IP (VoIP)Peter R. Egli100% (1)