Das könnte Ihnen auch gefallen
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- ASCE 7 10 Wind FMA Confere PDFDokument64 SeitenASCE 7 10 Wind FMA Confere PDFRicardoMallma100% (6)
- Scientific American Architects and Builders Edition 1898 Jan-DecDokument399 SeitenScientific American Architects and Builders Edition 1898 Jan-DecNickiedeposieNoch keine Bewertungen
- ASCE Design of MarinaDokument375 SeitenASCE Design of MarinaHeb Ru100% (1)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Design Guide 31 - Castellated and Cellular Beam DesignDokument117 SeitenDesign Guide 31 - Castellated and Cellular Beam DesignLCS100% (18)
- Aisc Design Examples v15.0 PDFDokument1.609 SeitenAisc Design Examples v15.0 PDFenrique colli100% (1)
- DBCT 7X Project Structural Standard DrawingsDokument50 SeitenDBCT 7X Project Structural Standard DrawingsNat Thana AnanNoch keine Bewertungen
- Design ManualDokument51 SeitenDesign ManualarpitNoch keine Bewertungen
- Creating A Timber Frame House v1Dokument77 SeitenCreating A Timber Frame House v1Gregor100% (2)
- MBMA-96load Combinations PDFDokument2 SeitenMBMA-96load Combinations PDFsonofalexander100% (1)
- Vehicle Crash BarriersDokument15 SeitenVehicle Crash BarriersRandyNoch keine Bewertungen
- 4201-232-V4-8900-08018 - 001 - Code 2Dokument82 Seiten4201-232-V4-8900-08018 - 001 - Code 2Shoaib KhanNoch keine Bewertungen
- Design of Rigid Pavement PDFDokument24 SeitenDesign of Rigid Pavement PDFSayantan Chakraborty75% (4)
- Maintenance Standard For Port Structures in Asean-JapanDokument143 SeitenMaintenance Standard For Port Structures in Asean-JapanOSE0597100% (1)
- Unified Facilities Criteria - Piers and WharvesDokument175 SeitenUnified Facilities Criteria - Piers and WharvesRoda CadizNoch keine Bewertungen
- 062 Manual Traffic Sign and Gantries NorwayDokument141 Seiten062 Manual Traffic Sign and Gantries NorwayNat Thana AnanNoch keine Bewertungen
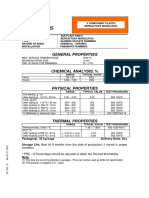
- Material Test Certificate: M/s Alstom Projects India LimitedDokument1 SeiteMaterial Test Certificate: M/s Alstom Projects India LimitedDeepak HoleNoch keine Bewertungen
- BD51-98 - Sign Portal DesignDokument53 SeitenBD51-98 - Sign Portal DesignNat Thana AnanNoch keine Bewertungen
- BD51-98 - Sign Portal DesignDokument53 SeitenBD51-98 - Sign Portal DesignNat Thana AnanNoch keine Bewertungen
- TeknosDokument76 SeitenTeknosMartin LafonNoch keine Bewertungen
- Finite Element Analysis Project Proposal For Yacht Hydrodynamic QuantificationDokument10 SeitenFinite Element Analysis Project Proposal For Yacht Hydrodynamic QuantificationNat Thana AnanNoch keine Bewertungen
- Finite Element Analysis Project Proposal For Yacht Hydrodynamic QuantificationDokument10 SeitenFinite Element Analysis Project Proposal For Yacht Hydrodynamic QuantificationNat Thana AnanNoch keine Bewertungen
- BeamElementFormulationWithVaryingSection WhitePaper PDFDokument10 SeitenBeamElementFormulationWithVaryingSection WhitePaper PDFNat Thana AnanNoch keine Bewertungen
- SFT Design Manual A4 English 2017 PDFDokument60 SeitenSFT Design Manual A4 English 2017 PDFNat Thana AnanNoch keine Bewertungen
- Uniform Building Code Volume 21997Dokument545 SeitenUniform Building Code Volume 21997raymond100% (1)
- Ministerial Regulations 48Dokument6 SeitenMinisterial Regulations 48Nat Thana AnanNoch keine Bewertungen
- Bs en Iso 14122 Part 3 PDFDokument24 SeitenBs en Iso 14122 Part 3 PDFNat Thana AnanNoch keine Bewertungen
- Hilti Catalog 2017 6 AnchorDokument80 SeitenHilti Catalog 2017 6 AnchorNat Thana AnanNoch keine Bewertungen
- AISI Design Methods For Sheathing Braced DesignDokument48 SeitenAISI Design Methods For Sheathing Braced DesignNat Thana AnanNoch keine Bewertungen
- MBMA Fabricate Erection Tolerance 18 01 10 PDFDokument2 SeitenMBMA Fabricate Erection Tolerance 18 01 10 PDFNat Thana AnanNoch keine Bewertungen
- BeamElementFormulationWithVaryingSection WhitePaper PDFDokument10 SeitenBeamElementFormulationWithVaryingSection WhitePaper PDFNat Thana AnanNoch keine Bewertungen
- Hilti Catalog 2017 6 AnchorDokument80 SeitenHilti Catalog 2017 6 AnchorNat Thana AnanNoch keine Bewertungen
- Weathering Steel For Highway StructuresDokument20 SeitenWeathering Steel For Highway StructuresNat Thana AnanNoch keine Bewertungen
- EN 14122 1 2001 A1 2010 Choice of Means of AccessDokument1 SeiteEN 14122 1 2001 A1 2010 Choice of Means of AccessNat Thana AnanNoch keine Bewertungen
- MBMA Fabricate Erection Tolerance 18 01 10 PDFDokument2 SeitenMBMA Fabricate Erection Tolerance 18 01 10 PDFNat Thana AnanNoch keine Bewertungen
- EN 14122 1 2001 A1 2010 Choice of Means of AccessDokument1 SeiteEN 14122 1 2001 A1 2010 Choice of Means of AccessNat Thana AnanNoch keine Bewertungen
- AdmixtureDokument7 SeitenAdmixturevinay rodeNoch keine Bewertungen
- Pf-1000 Powerflood Floodlight: ApplicationsDokument2 SeitenPf-1000 Powerflood Floodlight: ApplicationsFalcon ManNoch keine Bewertungen
- Kawara Quotation - Feroof Rio (Wang Wang Empire Development Inc.)Dokument5 SeitenKawara Quotation - Feroof Rio (Wang Wang Empire Development Inc.)Rose Anne RegistradoNoch keine Bewertungen
- 5370 pgs75-78 - Part - 1Dokument4 Seiten5370 pgs75-78 - Part - 1claudioandrevalverdeNoch keine Bewertungen
- 【Discontinued Model】APV・SPV Series (0.1MB)Dokument3 Seiten【Discontinued Model】APV・SPV Series (0.1MB)Wei-Feng FangNoch keine Bewertungen
- Problem Set 3 - Deformations, Normal and Shear Strains, and Statically Indeterminate Members, Thermal Stress Problem 1Dokument5 SeitenProblem Set 3 - Deformations, Normal and Shear Strains, and Statically Indeterminate Members, Thermal Stress Problem 1JamED ALRubioNoch keine Bewertungen
- 2 CT-TheoryDokument9 Seiten2 CT-TheorynabilNoch keine Bewertungen
- Ciac MinisplitDokument3 SeitenCiac MinisplitAracelyAraAraNoch keine Bewertungen
- Aerospace Material SpecificationDokument6 SeitenAerospace Material SpecificationAnonymous T6GllLl0Noch keine Bewertungen
- Sudipto 800. Ground CompltDokument18 SeitenSudipto 800. Ground CompltSudipto RoyNoch keine Bewertungen
- Set 4 Process & 1st LawDokument23 SeitenSet 4 Process & 1st LawKhuram s6Noch keine Bewertungen
- Shallow Foundations - Settlement and EC7Dokument18 SeitenShallow Foundations - Settlement and EC7Ashik Rehmath ParambilNoch keine Bewertungen
- SlipformDokument17 SeitenSlipformShanmuga Priya SNoch keine Bewertungen
- Presentation On Summer InternshipDokument19 SeitenPresentation On Summer InternshipBadal NayakNoch keine Bewertungen
- ASTM D2394-83 (1999) Simulated Service Testing of Wood and Wood-Base Finish FlooringDokument10 SeitenASTM D2394-83 (1999) Simulated Service Testing of Wood and Wood-Base Finish FlooringĐỗ Thanh TùngNoch keine Bewertungen
- JMC FORMAT FOR 3C x300 SQMMM UG CableDokument1 SeiteJMC FORMAT FOR 3C x300 SQMMM UG CableKuldeep KumarNoch keine Bewertungen
- Iom 11 2017 30RB 30RQ A 017-040 30rby 017-033Dokument26 SeitenIom 11 2017 30RB 30RQ A 017-040 30rby 017-033sergio saldivia ramirezNoch keine Bewertungen
- Catalogue 2013Dokument27 SeitenCatalogue 2013Asghar KhanNoch keine Bewertungen
- 00 Saip 78Dokument10 Seiten00 Saip 78Shoaib NazirNoch keine Bewertungen
- Bulk Density of BricksDokument1 SeiteBulk Density of BrickssuryakantameNoch keine Bewertungen
- 50ucupv PSD enDokument58 Seiten50ucupv PSD enMohd AzharNoch keine Bewertungen
- Rasb 10 GkvpeDokument134 SeitenRasb 10 GkvpeAR&MENDES ENGENHARIANoch keine Bewertungen
- Manhole-Brochure 1115Dokument4 SeitenManhole-Brochure 1115Surung P. Kreison (CARBOLINE)Noch keine Bewertungen
- Ace Plast Ram C Revised July 2016Dokument1 SeiteAce Plast Ram C Revised July 2016pulakjaiswal85Noch keine Bewertungen