Das könnte Ihnen auch gefallen
- Active Disturbance Rejection Control for Nonlinear Systems: An IntroductionVon EverandActive Disturbance Rejection Control for Nonlinear Systems: An IntroductionNoch keine Bewertungen
- Computer Structures - MPIDokument16 SeitenComputer Structures - MPIYomal WijesingheNoch keine Bewertungen
- Assignment1 PDFDokument5 SeitenAssignment1 PDFpristo sellerNoch keine Bewertungen
- Adaptive Systems in Control and Signal Processing 1983: Proceedings of the IFAC Workshop, San Francisco, USA, 20-22 June 1983Von EverandAdaptive Systems in Control and Signal Processing 1983: Proceedings of the IFAC Workshop, San Francisco, USA, 20-22 June 1983Noch keine Bewertungen
- Debugger Hc12Dokument52 SeitenDebugger Hc12carver_uaNoch keine Bewertungen
- Ec2304 LP III EceDokument5 SeitenEc2304 LP III EcesunvenkatNoch keine Bewertungen
- Real Time Operating System A Complete Guide - 2020 EditionVon EverandReal Time Operating System A Complete Guide - 2020 EditionNoch keine Bewertungen
- M01 Opnet MM1Dokument35 SeitenM01 Opnet MM1Engr. Sohaib JamalNoch keine Bewertungen
- 4Dokument5 Seiten4Alsmany ArdabNoch keine Bewertungen
- High Voltage Direct Current Transmission: Converters, Systems and DC GridsVon EverandHigh Voltage Direct Current Transmission: Converters, Systems and DC GridsNoch keine Bewertungen
- Lab #4Dokument4 SeitenLab #4Bryan Ricardo Boyer0% (1)
- Railroad Signal Specialist: Passbooks Study GuideVon EverandRailroad Signal Specialist: Passbooks Study GuideNoch keine Bewertungen
- Clap CounterDokument2 SeitenClap CounterRiddhi Hiren KakkaNoch keine Bewertungen
- LPC2148 User ManualDokument62 SeitenLPC2148 User ManualAri Krishnan0% (2)
- Lab 2 Introduction To DSCH Schematic Entry and Simulation of A CMOS InverterDokument3 SeitenLab 2 Introduction To DSCH Schematic Entry and Simulation of A CMOS InverterSrinivas KaratlapelliNoch keine Bewertungen
- Difference Between Microcontroller FamiliesDokument3 SeitenDifference Between Microcontroller FamiliesvinuNoch keine Bewertungen
- Writing C Code For The 8051Dokument52 SeitenWriting C Code For The 8051BHUSHANNoch keine Bewertungen
- The Automated PIC Microcontroller Based Temperature Control of Fan Speed Design - TJ233.P76 .N87 2009Dokument24 SeitenThe Automated PIC Microcontroller Based Temperature Control of Fan Speed Design - TJ233.P76 .N87 2009tidjani86100% (1)
- Algoritham and Architectural Level MethodologiesDokument44 SeitenAlgoritham and Architectural Level Methodologiesxyz333447343Noch keine Bewertungen
- CS 8491 Computer ArchitectureDokument103 SeitenCS 8491 Computer ArchitectureMUKESH KUMAR P 2019-2023 CSENoch keine Bewertungen
- DdedemoDokument10 SeitenDdedemoNancy LimonNoch keine Bewertungen
- Report On 4x1 MultiplexerDokument17 SeitenReport On 4x1 MultiplexerPRAVEEN KUMAWATNoch keine Bewertungen
- Micro MouseDokument17 SeitenMicro MouseFarshad yazdiNoch keine Bewertungen
- Report On Scrolling Led Board Using 8051Dokument13 SeitenReport On Scrolling Led Board Using 8051harsha vardhan satyanaryanaNoch keine Bewertungen
- Tripping Sequence Recorder Cum IndicatorDokument7 SeitenTripping Sequence Recorder Cum IndicatormahbubunnisaNoch keine Bewertungen
- 1746sc-NI8u Manual 0300172 03DDokument130 Seiten1746sc-NI8u Manual 0300172 03Drfg21100% (1)
- Xact UserDokument268 SeitenXact Userwenyuchen96Noch keine Bewertungen
- CNC Report Bhel Haridwar Summer Training Report Electronic & CommunicationDokument29 SeitenCNC Report Bhel Haridwar Summer Training Report Electronic & Communicationritika_arora19067% (3)
- Design and Implement of QPSK Modem Based On FPGADokument3 SeitenDesign and Implement of QPSK Modem Based On FPGAAnil PatilNoch keine Bewertungen
- Frequency Response PlotsDokument8 SeitenFrequency Response PlotsMOHAMED IBRAHIM0% (1)
- Lab10 Veriloga Adc TutorialDokument10 SeitenLab10 Veriloga Adc TutorialmaxsilverNoch keine Bewertungen
- Easa Rep Resea 2008 1Dokument99 SeitenEasa Rep Resea 2008 1MESUT TOZANNoch keine Bewertungen
- High Resolution Digital-To-Time Converter For Low Jitter Digital PllsDokument4 SeitenHigh Resolution Digital-To-Time Converter For Low Jitter Digital PllsroomaNoch keine Bewertungen
- Performance Analysis of Wired, Wireless and Optical Network Using NS2Dokument7 SeitenPerformance Analysis of Wired, Wireless and Optical Network Using NS2Editor IJRITCCNoch keine Bewertungen
- MIPStext PDFDokument122 SeitenMIPStext PDFConstantineNoch keine Bewertungen
- DsPIC30F4011 - Robotics 3Dokument33 SeitenDsPIC30F4011 - Robotics 3Senthil Kumar100% (1)
- 2 - FPGA Implementation of Pipelined 2D-DCT and Quantization Architecture For JPEG Image Compression.Dokument6 Seiten2 - FPGA Implementation of Pipelined 2D-DCT and Quantization Architecture For JPEG Image Compression.Mahesh MahiNoch keine Bewertungen
- EcosimPro 4 6 Installation and Getting StartedDokument64 SeitenEcosimPro 4 6 Installation and Getting Startedrentboyrodriguez100% (1)
- Unit - I: Introduction To Embedded SystemsDokument47 SeitenUnit - I: Introduction To Embedded SystemsaishwaryaNoch keine Bewertungen
- 11-5699 Inprocess FAQ - FinalDokument7 Seiten11-5699 Inprocess FAQ - Finalsidiq16Noch keine Bewertungen
- Mcs 014 Systeem Design PDFDokument10 SeitenMcs 014 Systeem Design PDFMuthukrishnan NNoch keine Bewertungen
- Cisco MGCP UnderstandingDokument30 SeitenCisco MGCP UnderstandingHemanth KumarNoch keine Bewertungen
- User Manual: 1305 Adjustable Frequency AC Drive (Series C)Dokument170 SeitenUser Manual: 1305 Adjustable Frequency AC Drive (Series C)gmdeucsNoch keine Bewertungen
- Zhao. Space Vector PWM Control of Dual Three-Phase Induction Machine Using Vector Space DecompositionDokument10 SeitenZhao. Space Vector PWM Control of Dual Three-Phase Induction Machine Using Vector Space DecompositionAnonymous 1D3dCWNcNoch keine Bewertungen
- XK Epm1001a ManualDokument20 SeitenXK Epm1001a ManualCaleb OdagledNoch keine Bewertungen
- OpenFlow Circuit Switch Specification v0.3Dokument16 SeitenOpenFlow Circuit Switch Specification v0.3Dostojev_84Noch keine Bewertungen
- Anti Theft System For Valuable Items Using LDRDokument6 SeitenAnti Theft System For Valuable Items Using LDRKethavath Sakrunaik KNoch keine Bewertungen
- Lab 5Dokument8 SeitenLab 5robertoNoch keine Bewertungen
- Distributed Control SystemDokument11 SeitenDistributed Control Systemjibin shajiNoch keine Bewertungen
- Ei-2406 Isd Lab Manual (2013)Dokument47 SeitenEi-2406 Isd Lab Manual (2013)Rahul GRNoch keine Bewertungen
- MC9S08FL16Dokument34 SeitenMC9S08FL16saom09Noch keine Bewertungen
- Piccolo MicrocontrollersDokument159 SeitenPiccolo MicrocontrollersrangerfordNoch keine Bewertungen
- High-Bandwidth Current Control of 3-Phase PMSM Using The F2837x Fast Current Loop Library PDFDokument21 SeitenHigh-Bandwidth Current Control of 3-Phase PMSM Using The F2837x Fast Current Loop Library PDFmotionNoch keine Bewertungen
- MPC 5565 PDFDokument54 SeitenMPC 5565 PDFvarimasrNoch keine Bewertungen
- MC9S08AC128Dokument40 SeitenMC9S08AC128Felipe BampiNoch keine Bewertungen
- Sensorless ACIM Field-Oriented Control On Kinetis KV and KE: Application NoteDokument57 SeitenSensorless ACIM Field-Oriented Control On Kinetis KV and KE: Application NoteGeorge VasquezNoch keine Bewertungen
- Sensorless PMSM Field-Oriented Control On Kinetis KV and KE: Application NoteDokument51 SeitenSensorless PMSM Field-Oriented Control On Kinetis KV and KE: Application NoteGeorge VasquezNoch keine Bewertungen
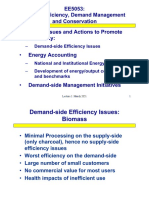
- EE5053: Energy Efficiency Demand Management and ConservationDokument7 SeitenEE5053: Energy Efficiency Demand Management and ConservationakilaNoch keine Bewertungen
- MSc21 Lecture 1 Demand-Side Efficiency and Energy AccountingDokument29 SeitenMSc21 Lecture 1 Demand-Side Efficiency and Energy AccountingakilaNoch keine Bewertungen
- S.S. Subramaniyam Civil Engineering Contracts - p03Dokument3 SeitenS.S. Subramaniyam Civil Engineering Contracts - p03akilaNoch keine Bewertungen
- EE5053: Energy Efficiency Demand Management and ConservationDokument7 SeitenEE5053: Energy Efficiency Demand Management and ConservationakilaNoch keine Bewertungen
- MSc21 Lecture 2 Demand-Side Management - Compatibility ModeDokument21 SeitenMSc21 Lecture 2 Demand-Side Management - Compatibility ModeakilaNoch keine Bewertungen
- Mapil Civil Engineering ConstructionDokument2 SeitenMapil Civil Engineering ConstructionakilaNoch keine Bewertungen
- Mapil Civil Engineering ConstructionDokument2 SeitenMapil Civil Engineering ConstructionakilaNoch keine Bewertungen
- Mapil Civil Engineering ConstructionDokument2 SeitenMapil Civil Engineering ConstructionakilaNoch keine Bewertungen
- Extention Period: 2 MonthsDokument1 SeiteExtention Period: 2 MonthsakilaNoch keine Bewertungen
- Facing Slip - Engineering: KotugodaDokument1 SeiteFacing Slip - Engineering: KotugodaakilaNoch keine Bewertungen
- Saman Traders NochchiyagamaDokument5 SeitenSaman Traders NochchiyagamaakilaNoch keine Bewertungen
- Policy No: Claim No:: K10014CF0000398 CLK100CF21000034Dokument3 SeitenPolicy No: Claim No:: K10014CF0000398 CLK100CF21000034akilaNoch keine Bewertungen
- Load Flow Analysis Example Go To "File" New Project Chose A Location To Save Your Project and Give A Name To The Project As FollowsDokument6 SeitenLoad Flow Analysis Example Go To "File" New Project Chose A Location To Save Your Project and Give A Name To The Project As FollowsakilaNoch keine Bewertungen
- MPPT Algorithm PDFDokument8 SeitenMPPT Algorithm PDFakilaNoch keine Bewertungen
- University of Colombo, Sri Lanka Faculty of Science: Level Iii Examination in Science - Semester I - 2013Dokument3 SeitenUniversity of Colombo, Sri Lanka Faculty of Science: Level Iii Examination in Science - Semester I - 2013akilaNoch keine Bewertungen
- ICADokument7 SeitenICAakilaNoch keine Bewertungen
- MPPT Algorithm PDFDokument8 SeitenMPPT Algorithm PDFakilaNoch keine Bewertungen
- Kinematic Analysis of 5 Dof Lynx ArmDokument6 SeitenKinematic Analysis of 5 Dof Lynx ArmsathyaNoch keine Bewertungen
- Deep Sea Research Submarine Report PDFDokument128 SeitenDeep Sea Research Submarine Report PDFy_596688032Noch keine Bewertungen
- Utilisation of Electrical Energy May 2008Dokument8 SeitenUtilisation of Electrical Energy May 2008rajaniramNoch keine Bewertungen
- 10 MIPS Floating Point ArithmeticDokument28 Seiten10 MIPS Floating Point ArithmeticHabibullah Khan MazariNoch keine Bewertungen
- Vladimir Lopez Stem Teacher ResumeDokument1 SeiteVladimir Lopez Stem Teacher Resumeapi-325782374Noch keine Bewertungen
- Der 484Dokument84 SeitenDer 484Rohit SainiNoch keine Bewertungen
- A Review of Error-Related Potential-Based Brain-Computer Interfaces For Motor Impaired PeopleDokument16 SeitenA Review of Error-Related Potential-Based Brain-Computer Interfaces For Motor Impaired PeopleAkshay KumarNoch keine Bewertungen
- Westerbeke 4,5BCGTC Instruction Manual PDFDokument53 SeitenWesterbeke 4,5BCGTC Instruction Manual PDFcengiz kutukcu100% (2)
- TableauDokument5 SeitenTableaudharmendardNoch keine Bewertungen
- Tema Tubesheet Calculation SheetDokument1 SeiteTema Tubesheet Calculation SheetSanjeev KachharaNoch keine Bewertungen
- How Write A Better EmailDokument77 SeitenHow Write A Better EmailgnpatelNoch keine Bewertungen
- Mempower Busduct - PG - EN - 6 - 2012 PDFDokument38 SeitenMempower Busduct - PG - EN - 6 - 2012 PDFAbelRamadhanNoch keine Bewertungen
- AIS - 007 - Rev 5 - Table - 1Dokument21 SeitenAIS - 007 - Rev 5 - Table - 1Vino Joseph VargheseNoch keine Bewertungen
- Understanding and Applying Innovation Strategies in The Public SectorDokument21 SeitenUnderstanding and Applying Innovation Strategies in The Public SectorEda Paje AdornadoNoch keine Bewertungen
- Lexium Motion Control 200401Dokument130 SeitenLexium Motion Control 200401Mohamed Elsayed HasanNoch keine Bewertungen
- 8.4.2 Detecting The Presence/Absence of Paper: Pickup RollerDokument2 Seiten8.4.2 Detecting The Presence/Absence of Paper: Pickup RollerHERL NEIL BilbaoNoch keine Bewertungen
- Syllabus For Management 120A Intermediate Accounting - Spring 2009Dokument6 SeitenSyllabus For Management 120A Intermediate Accounting - Spring 2009John KimNoch keine Bewertungen
- Ejemplitos de Latex: H Ector Manuel Mora Escobar Universidad Central, Bogot ADokument20 SeitenEjemplitos de Latex: H Ector Manuel Mora Escobar Universidad Central, Bogot AAmanda GarciaNoch keine Bewertungen
- Oem National 14-P-220 7500psiDokument9 SeitenOem National 14-P-220 7500psiandrew0% (1)
- 243 RegulatorDokument24 Seiten243 RegulatorDavid Somogyi DovalNoch keine Bewertungen
- Astm A325mDokument8 SeitenAstm A325mChitra Devi100% (1)
- Assessment Rubric Coach Manual Oct 11 - FinalDokument9 SeitenAssessment Rubric Coach Manual Oct 11 - Finalapi-246218373Noch keine Bewertungen
- Project Based Learning Is A Student Centered Pedagogy ThatDokument3 SeitenProject Based Learning Is A Student Centered Pedagogy ThatPayel DaluiNoch keine Bewertungen
- fmx4 PartsDokument1 Seitefmx4 PartsФедя ФедяNoch keine Bewertungen
- ALR Compact Repeater: Future On DemandDokument62 SeitenALR Compact Repeater: Future On DemandmickycachoperroNoch keine Bewertungen
- 07-GB Column BasesDokument14 Seiten07-GB Column BasesAUNGPSNoch keine Bewertungen
- Reducing Tee PDFDokument4 SeitenReducing Tee PDFpankrasius herbudiNoch keine Bewertungen
- Abuyog 2018 PDFDokument503 SeitenAbuyog 2018 PDFJackelyn Fortaliza RosquettesNoch keine Bewertungen
- Aiwa MC CSD-A120, A140 PDFDokument35 SeitenAiwa MC CSD-A120, A140 PDFRodrigo NegrelliNoch keine Bewertungen
- ChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindVon EverandChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindNoch keine Bewertungen
- The Fabric of Civilization: How Textiles Made the WorldVon EverandThe Fabric of Civilization: How Textiles Made the WorldBewertung: 4.5 von 5 Sternen4.5/5 (58)
- Highest Duty: My Search for What Really MattersVon EverandHighest Duty: My Search for What Really MattersNoch keine Bewertungen
- Hero Found: The Greatest POW Escape of the Vietnam WarVon EverandHero Found: The Greatest POW Escape of the Vietnam WarBewertung: 4 von 5 Sternen4/5 (19)
- Sully: The Untold Story Behind the Miracle on the HudsonVon EverandSully: The Untold Story Behind the Miracle on the HudsonBewertung: 4 von 5 Sternen4/5 (103)
- The End of Craving: Recovering the Lost Wisdom of Eating WellVon EverandThe End of Craving: Recovering the Lost Wisdom of Eating WellBewertung: 4.5 von 5 Sternen4.5/5 (81)
- System Error: Where Big Tech Went Wrong and How We Can RebootVon EverandSystem Error: Where Big Tech Went Wrong and How We Can RebootNoch keine Bewertungen
- Transformed: Moving to the Product Operating ModelVon EverandTransformed: Moving to the Product Operating ModelBewertung: 4 von 5 Sternen4/5 (1)
- Reality+: Virtual Worlds and the Problems of PhilosophyVon EverandReality+: Virtual Worlds and the Problems of PhilosophyBewertung: 4 von 5 Sternen4/5 (24)
- Faster: How a Jewish Driver, an American Heiress, and a Legendary Car Beat Hitler's BestVon EverandFaster: How a Jewish Driver, an American Heiress, and a Legendary Car Beat Hitler's BestBewertung: 4 von 5 Sternen4/5 (28)
- Pale Blue Dot: A Vision of the Human Future in SpaceVon EverandPale Blue Dot: A Vision of the Human Future in SpaceBewertung: 4.5 von 5 Sternen4.5/5 (588)
- The Intel Trinity: How Robert Noyce, Gordon Moore, and Andy Grove Built the World's Most Important CompanyVon EverandThe Intel Trinity: How Robert Noyce, Gordon Moore, and Andy Grove Built the World's Most Important CompanyNoch keine Bewertungen
- Packing for Mars: The Curious Science of Life in the VoidVon EverandPacking for Mars: The Curious Science of Life in the VoidBewertung: 4 von 5 Sternen4/5 (1395)
- The Beekeeper's Lament: How One Man and Half a Billion Honey Bees Help Feed AmericaVon EverandThe Beekeeper's Lament: How One Man and Half a Billion Honey Bees Help Feed AmericaNoch keine Bewertungen
- How to Build a Car: The Autobiography of the World’s Greatest Formula 1 DesignerVon EverandHow to Build a Car: The Autobiography of the World’s Greatest Formula 1 DesignerBewertung: 4.5 von 5 Sternen4.5/5 (54)
- A Place of My Own: The Architecture of DaydreamsVon EverandA Place of My Own: The Architecture of DaydreamsBewertung: 4 von 5 Sternen4/5 (242)
- Fire on the Horizon: The Untold Story of the Gulf Oil DisasterVon EverandFire on the Horizon: The Untold Story of the Gulf Oil DisasterNoch keine Bewertungen
- The Future of Geography: How the Competition in Space Will Change Our WorldVon EverandThe Future of Geography: How the Competition in Space Will Change Our WorldBewertung: 4 von 5 Sternen4/5 (5)
- How to Build a Car: The Autobiography of the World’s Greatest Formula 1 DesignerVon EverandHow to Build a Car: The Autobiography of the World’s Greatest Formula 1 DesignerBewertung: 4.5 von 5 Sternen4.5/5 (122)
- The Weather Machine: A Journey Inside the ForecastVon EverandThe Weather Machine: A Journey Inside the ForecastBewertung: 3.5 von 5 Sternen3.5/5 (31)
- Broken Money: Why Our Financial System is Failing Us and How We Can Make it BetterVon EverandBroken Money: Why Our Financial System is Failing Us and How We Can Make it BetterBewertung: 5 von 5 Sternen5/5 (3)
- The Things We Make: The Unknown History of Invention from Cathedrals to Soda CansVon EverandThe Things We Make: The Unknown History of Invention from Cathedrals to Soda CansNoch keine Bewertungen
- Dirt to Soil: One Family’s Journey into Regenerative AgricultureVon EverandDirt to Soil: One Family’s Journey into Regenerative AgricultureBewertung: 5 von 5 Sternen5/5 (125)
- The Technology Trap: Capital, Labor, and Power in the Age of AutomationVon EverandThe Technology Trap: Capital, Labor, and Power in the Age of AutomationBewertung: 4.5 von 5 Sternen4.5/5 (46)
- Data-ism: The Revolution Transforming Decision Making, Consumer Behavior, and Almost Everything ElseVon EverandData-ism: The Revolution Transforming Decision Making, Consumer Behavior, and Almost Everything ElseBewertung: 3.5 von 5 Sternen3.5/5 (12)