Das könnte Ihnen auch gefallen
- Prueba 01Dokument4 SeitenPrueba 01Lenin SanchezNoch keine Bewertungen
- McPhee La Revolucion Francesa 1789 - 1799Dokument2 SeitenMcPhee La Revolucion Francesa 1789 - 1799Lenin SanchezNoch keine Bewertungen
- Semana 6Dokument6 SeitenSemana 6Lenin SanchezNoch keine Bewertungen
- Semana 5Dokument9 SeitenSemana 5Lenin SanchezNoch keine Bewertungen
- Peter McPhee La Revolucion Francesa 1789 1799 C PDFDokument137 SeitenPeter McPhee La Revolucion Francesa 1789 1799 C PDFRocio83% (6)
- Semana 4Dokument6 SeitenSemana 4Lenin SanchezNoch keine Bewertungen
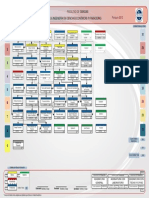
- Malla Curricular Ing en Ciencias Economicas y Financieras1 PDFDokument1 SeiteMalla Curricular Ing en Ciencias Economicas y Financieras1 PDFDavidviniss Akd JsNoch keine Bewertungen
- Semana 5Dokument9 SeitenSemana 5Lenin SanchezNoch keine Bewertungen
- Semana 3Dokument9 SeitenSemana 3Lenin SanchezNoch keine Bewertungen
- Semana 1Dokument4 SeitenSemana 1Lenin SanchezNoch keine Bewertungen
- Aguas Acidas Trabjo CompletoDokument36 SeitenAguas Acidas Trabjo CompletoDimas EscorciaNoch keine Bewertungen
- Colmena Siglo XVIIIDokument22 SeitenColmena Siglo XVIIIAnonymous WdGQ0KeNoch keine Bewertungen
- Gadamer DerridaDokument20 SeitenGadamer DerridaMalosGodelNoch keine Bewertungen
- Asamblea Asoc - Mburucuya 19Dokument6 SeitenAsamblea Asoc - Mburucuya 19Melina FariñaNoch keine Bewertungen
- Matriz de Rehabilitación y Estimulación Neuropsicológica - 381Dokument19 SeitenMatriz de Rehabilitación y Estimulación Neuropsicológica - 381Cagua Juan AntonioNoch keine Bewertungen
- Solaris. Stanislaw LemDokument209 SeitenSolaris. Stanislaw Lemacalvoalv0% (1)
- Plan de Trabajo - Unidad 2 - Bme PDFDokument17 SeitenPlan de Trabajo - Unidad 2 - Bme PDFClaudia Osorio FalconiNoch keine Bewertungen
- Reporte 1Dokument5 SeitenReporte 1Eduardo HernandezNoch keine Bewertungen
- Semiotica 2Dokument4 SeitenSemiotica 2karenNoch keine Bewertungen
- El huevo de obsidiana: efectos energéticos y terapéuticosDokument10 SeitenEl huevo de obsidiana: efectos energéticos y terapéuticosLupita CuevasNoch keine Bewertungen
- Ficha Técnica Del ArándanoDokument1 SeiteFicha Técnica Del ArándanoThalia Quezada Gamonal64% (11)
- Sinba-Sis-Ec-P 2021 Tarjeta de Registro y Control de Enf CronicasDokument2 SeitenSinba-Sis-Ec-P 2021 Tarjeta de Registro y Control de Enf CronicasAlejandro alcántaraNoch keine Bewertungen
- Crepusculo ResumenDokument34 SeitenCrepusculo Resumendocto_lucky100% (1)
- Reconocimiento Geológico de Yura, Arequipa - Perú - Explorock - Blog de Las Geociencias y ExploraciónDokument21 SeitenReconocimiento Geológico de Yura, Arequipa - Perú - Explorock - Blog de Las Geociencias y ExploraciónBrayanChoquehuancaNoch keine Bewertungen
- 1 (1) . - MICROBIOLOGIA UjapDokument44 Seiten1 (1) . - MICROBIOLOGIA Ujapmaria joseNoch keine Bewertungen
- Informe 001 de La Planta AurelsaDokument19 SeitenInforme 001 de La Planta AurelsaMilagros Allcca NoaNoch keine Bewertungen
- Autoevaluación N°1 - SIM 2 2Dokument4 SeitenAutoevaluación N°1 - SIM 2 2MARION SHIRLEY FERNANDEZ CALDERONNoch keine Bewertungen
- Semana 06 - Agregados para La Construccion 02Dokument45 SeitenSemana 06 - Agregados para La Construccion 02GROVER ESPINOZA MONARESNoch keine Bewertungen
- La Evidencia en La Escena Del CrimenDokument2 SeitenLa Evidencia en La Escena Del Crimenbrighitd.cerdan.cNoch keine Bewertungen
- Control Del Motor 1.6Dokument4 SeitenControl Del Motor 1.6Eugenia MorenoNoch keine Bewertungen
- Cronograma Neurociencias 2018ADokument2 SeitenCronograma Neurociencias 2018AVG DavidNoch keine Bewertungen
- Capacitores Fijos y VariablesDokument5 SeitenCapacitores Fijos y VariablesAlberto Lencinas100% (2)
- Tarea Semana 5.1 Política Gubernamental y Desarrollo Humano SostenibleDokument6 SeitenTarea Semana 5.1 Política Gubernamental y Desarrollo Humano SostenibleMario CallesNoch keine Bewertungen
- Aerodinamica I PDFDokument9 SeitenAerodinamica I PDFWilfredo NievesNoch keine Bewertungen
- Reservas de La Biosfera Del PeruDokument4 SeitenReservas de La Biosfera Del PeruBARBARA MURIEL ATENCIO CABANILLASNoch keine Bewertungen
- El Autoconocimiento y El Diálogo en San Agustín en Las Relaciones Interpersonales.Dokument12 SeitenEl Autoconocimiento y El Diálogo en San Agustín en Las Relaciones Interpersonales.Oscar Salado VegaNoch keine Bewertungen
- Ejer Cici OsDokument9 SeitenEjer Cici OsAndrea RamosNoch keine Bewertungen
- Informe #5 (Toxicidad Subaguda)Dokument3 SeitenInforme #5 (Toxicidad Subaguda)Manuel AlejandroNoch keine Bewertungen
- Evidencia Diagrama Identificar Proceso Preparacion BiofertilizanteDokument2 SeitenEvidencia Diagrama Identificar Proceso Preparacion Biofertilizantefabio romeroNoch keine Bewertungen
- ISO 2768 - Parte 1 - Tolerancias GeneralesDokument13 SeitenISO 2768 - Parte 1 - Tolerancias GeneralesLuis FelipeNoch keine Bewertungen