Das könnte Ihnen auch gefallen
- How To Reset Canon IP1880, IP 1100, IP1800 and IP2500 Series - Tricks-CollectionsDokument8 SeitenHow To Reset Canon IP1880, IP 1100, IP1800 and IP2500 Series - Tricks-CollectionsRobert CristobalNoch keine Bewertungen
- Form-093-Dump Truck Safety ChecklistDokument2 SeitenForm-093-Dump Truck Safety Checklistshamroz khan100% (2)
- Brushless Alternators: © 2000 Graig PearenDokument3 SeitenBrushless Alternators: © 2000 Graig PearenAboalfotoh Mahmoud100% (2)
- Oracle Fusion HCM Document of RecordsDokument12 SeitenOracle Fusion HCM Document of RecordsAravind AlavantharNoch keine Bewertungen
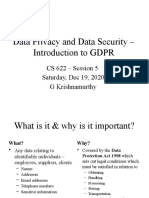
- Introduction To GDPRDokument107 SeitenIntroduction To GDPRHarkirat Vasir0% (1)
- Advanced CalculatorDokument21 SeitenAdvanced CalculatorjoebrislinNoch keine Bewertungen
- MTech Automotive ElectronicsDokument15 SeitenMTech Automotive ElectronicsRatnadeep Ghosh100% (1)
- Embedded Design Training ReportDokument52 SeitenEmbedded Design Training ReportAshish YadavNoch keine Bewertungen
- T Xyz ScopesDokument44 SeitenT Xyz ScopesDimitrios ChristodoulouNoch keine Bewertungen
- DC MachineDokument124 SeitenDC MachinejoebrislinNoch keine Bewertungen
- Autocad & Solidworks: Project Cum Training Report OnDokument32 SeitenAutocad & Solidworks: Project Cum Training Report OnSukhDeol0% (1)
- Canalta Meter Run Info SheetDokument3 SeitenCanalta Meter Run Info Sheetautrol100% (1)
- ISO IEC 17025 2017 Transition TemplateDokument8 SeitenISO IEC 17025 2017 Transition TemplateaasNoch keine Bewertungen
- I 4Dokument19 SeitenI 4B B Sylvester Easun - MRNoch keine Bewertungen
- Ankit AWSDokument36 SeitenAnkit AWSamit thakurNoch keine Bewertungen
- Design and Performance Analysis of Pneumatic 3 Axes Robotic Arm For Mechanical ComponentsDokument6 SeitenDesign and Performance Analysis of Pneumatic 3 Axes Robotic Arm For Mechanical ComponentsurveshNoch keine Bewertungen
- Authors' ProfilesDokument378 SeitenAuthors' ProfilesHabib MasumNoch keine Bewertungen
- Electronics Engineering CDR SampleDokument7 SeitenElectronics Engineering CDR SampleCDR Sample100% (1)
- ACAM A CNC Simulation Software For Effective LearningDokument8 SeitenACAM A CNC Simulation Software For Effective LearningManuel MerazNoch keine Bewertungen
- Automated Timetable Generator Using Machine LearningDokument5 SeitenAutomated Timetable Generator Using Machine Learningmehari kirosNoch keine Bewertungen
- Logo - File 7ecDokument3 SeitenLogo - File 7ecNihal GuptaNoch keine Bewertungen
- Certificate: CMR Institute of TechnologyDokument57 SeitenCertificate: CMR Institute of TechnologyAVINASHNoch keine Bewertungen
- The Importance of Engineering DrawingDokument4 SeitenThe Importance of Engineering DrawingAlly DeanNoch keine Bewertungen
- Project: "Sun Rise & Sun Set"Dokument18 SeitenProject: "Sun Rise & Sun Set"10-Aniket MatodkarNoch keine Bewertungen
- Polytechnic University of The Philippines College of Engineering Sta. Mesa Manila Computer Applications For ME - Activity 04Dokument3 SeitenPolytechnic University of The Philippines College of Engineering Sta. Mesa Manila Computer Applications For ME - Activity 04Lance Andrew LagmanNoch keine Bewertungen
- Simulation of Spot Welding Robot For Automotive Manufacturing ApplicationDokument14 SeitenSimulation of Spot Welding Robot For Automotive Manufacturing ApplicationKARTICK PRASADNoch keine Bewertungen
- Mca PDFDokument7 SeitenMca PDFChetan NagarNoch keine Bewertungen
- A Project ProposalDokument9 SeitenA Project ProposalYuman SharmaNoch keine Bewertungen
- Teaching and Learning Support For Computer Architecture and Organization Courses Design On Computer Engineering and Computer Science For Undergraduate A ReviewDokument6 SeitenTeaching and Learning Support For Computer Architecture and Organization Courses Design On Computer Engineering and Computer Science For Undergraduate A ReviewNancyNoch keine Bewertungen
- SSRN Id4211925Dokument4 SeitenSSRN Id4211925abdelhak AouadiNoch keine Bewertungen
- The Role of Computer Aided Design (CAD) in The Manufacturing and Digital Control (CAM)Dokument16 SeitenThe Role of Computer Aided Design (CAD) in The Manufacturing and Digital Control (CAM)Paddy Nji KilyNoch keine Bewertungen
- Robotic Arm LabDokument5 SeitenRobotic Arm LabBryan Owen Salcedo SantosNoch keine Bewertungen
- Mechatronics Thesis - Order Now OnDokument7 SeitenMechatronics Thesis - Order Now OnafmohgfawNoch keine Bewertungen
- Project ReportDokument149 SeitenProject ReportArun sharmaNoch keine Bewertungen
- COPPELIASIMDokument7 SeitenCOPPELIASIMRooban SNoch keine Bewertungen
- SPM Experiment 2Dokument11 SeitenSPM Experiment 2CHINTAN MODINoch keine Bewertungen
- Off-Line Robot Programming Framework: Abstract - The Industrial Robot Programming Is A Work For SpecialistDokument6 SeitenOff-Line Robot Programming Framework: Abstract - The Industrial Robot Programming Is A Work For SpecialistLeonardo ChaparroNoch keine Bewertungen
- PLM For Academy 2013 BDDokument52 SeitenPLM For Academy 2013 BDNeamtu AnaNoch keine Bewertungen
- JNTUA Software Engineering Lab Manual R20Dokument73 SeitenJNTUA Software Engineering Lab Manual R20kalyanitandasi9Noch keine Bewertungen
- InternshipDokument33 SeitenInternshipsravankumarNoch keine Bewertungen
- User Interface For Automation of A Product Design Processes: Dr. Hussein H. OwaiedDokument5 SeitenUser Interface For Automation of A Product Design Processes: Dr. Hussein H. OwaiedUbiquitous Computing and Communication JournalNoch keine Bewertungen
- Proposal For An Advanced Embedded System Trainer ModuleDokument3 SeitenProposal For An Advanced Embedded System Trainer ModuleSolomon AkpanNoch keine Bewertungen
- Computer Aided Manufacturing 2Dokument10 SeitenComputer Aided Manufacturing 2engrodeNoch keine Bewertungen
- SE ReportDokument43 SeitenSE ReportKen Adams100% (1)
- Industrial Automation Using MATLAB: Project Report OnDokument44 SeitenIndustrial Automation Using MATLAB: Project Report OnPravin ChimawekarNoch keine Bewertungen
- IA Search EngineDokument47 SeitenIA Search EngineSiswand BIn Mohd AliNoch keine Bewertungen
- Mobile Secure Examination System: Cyril Alosious P Sundar Raj MDokument4 SeitenMobile Secure Examination System: Cyril Alosious P Sundar Raj MEditor IJRITCCNoch keine Bewertungen
- 6 Sec 063 Chen Et Al AutomaticDokument5 Seiten6 Sec 063 Chen Et Al AutomaticjerciNoch keine Bewertungen
- A Component-Based Software Development and Execution Framework For Cax ApplicationsDokument5 SeitenA Component-Based Software Development and Execution Framework For Cax ApplicationsdseahNoch keine Bewertungen
- Project - Report - College - Management - System (1) Rashmi Pal2Dokument34 SeitenProject - Report - College - Management - System (1) Rashmi Pal2tiwaririshi681Noch keine Bewertungen
- Guidelines For Mechatronics EngineeringDokument10 SeitenGuidelines For Mechatronics EngineeringPyae HtooNoch keine Bewertungen
- Computer EngineeringDokument6 SeitenComputer EngineeringCruz L AntonioNoch keine Bewertungen
- Experiment No 12: I Practical SignificanceDokument11 SeitenExperiment No 12: I Practical SignificanceSatyam MarotheNoch keine Bewertungen
- EMBRYO: Didactic Module For Designing Integrated Circuits Using Mentor Graphics Environment: Full-Custom LayoutDokument9 SeitenEMBRYO: Didactic Module For Designing Integrated Circuits Using Mentor Graphics Environment: Full-Custom LayoutrichbuggerNoch keine Bewertungen
- Sushant Paper FinalDokument11 SeitenSushant Paper FinalMaxGorilla MadCartelNoch keine Bewertungen
- Brochure COEP Jan 2014Dokument20 SeitenBrochure COEP Jan 2014Amrik SinghNoch keine Bewertungen
- Design EngineeringDokument22 SeitenDesign EngineeringVishnu S NairNoch keine Bewertungen
- RAHUL CHOUBEY - Updated Term PaperDokument15 SeitenRAHUL CHOUBEY - Updated Term PaperRahul ChoubeyNoch keine Bewertungen
- Final AimlDokument37 SeitenFinal AimlpsgtelugoduNoch keine Bewertungen
- Automotive Embedded Systems-Model Based Approach ReviewDokument7 SeitenAutomotive Embedded Systems-Model Based Approach Reviewjnamdev668Noch keine Bewertungen
- Course MachineToolDesign IMTMA ICAMTDokument3 SeitenCourse MachineToolDesign IMTMA ICAMTAbhijeet RasalNoch keine Bewertungen
- The Application of Pro Engineer in CADCAMDokument9 SeitenThe Application of Pro Engineer in CADCAMHafiezul HassanNoch keine Bewertungen
- A Low-Cost Build-Your-Own Three Axis CNC Mill Prototype: Sundar Pandian and S. Raj PandianDokument6 SeitenA Low-Cost Build-Your-Own Three Axis CNC Mill Prototype: Sundar Pandian and S. Raj Pandianandri enggopNoch keine Bewertungen
- MT 1571 deDokument22 SeitenMT 1571 denikhilrajput686Noch keine Bewertungen
- Design and Production Automation For Mass Customisation - An Initial Framework Proposal Evaluated in Engineering Education and SME ContextsDokument10 SeitenDesign and Production Automation For Mass Customisation - An Initial Framework Proposal Evaluated in Engineering Education and SME ContextsJosip StjepandicNoch keine Bewertungen
- Future of Manufacturing Technology RapidDokument10 SeitenFuture of Manufacturing Technology Rapidsreedhara g pNoch keine Bewertungen
- DS74 033Dokument6 SeitenDS74 033Sankit IngaleNoch keine Bewertungen
- The Calculator Technique Is in The Applied Overview in The Civil EngineeringDokument5 SeitenThe Calculator Technique Is in The Applied Overview in The Civil EngineeringedrianNoch keine Bewertungen
- Computer Engineer CareersDokument3 SeitenComputer Engineer CareersGhian SunigaNoch keine Bewertungen
- CAD CAM Laboratory ManualDokument227 SeitenCAD CAM Laboratory ManualGopinath B L NaiduNoch keine Bewertungen
- Exp 1 Verification of Ohm's and Kirchhoff's LawsDokument5 SeitenExp 1 Verification of Ohm's and Kirchhoff's LawsjoebrislinNoch keine Bewertungen
- Lab Manual: Ee 2305 Electrical Machines Lab IiDokument38 SeitenLab Manual: Ee 2305 Electrical Machines Lab IiskrtamilNoch keine Bewertungen
- 1 PDFDokument47 Seiten1 PDFjoebrislinNoch keine Bewertungen
- FireBird V Hardware Manual V1.08 2012-10-12Dokument121 SeitenFireBird V Hardware Manual V1.08 2012-10-12Oshin Sharel BrittoNoch keine Bewertungen
- How To Read An Op - Amp - DatasheetDokument2 SeitenHow To Read An Op - Amp - DatasheetJeff Brown100% (1)
- AOM No. SDOI-2022-018 Mlchelle Dg. Arlola Evelyn A. NisperosDokument3 SeitenAOM No. SDOI-2022-018 Mlchelle Dg. Arlola Evelyn A. NisperosRafael EncarnacionNoch keine Bewertungen
- Certification SmaDokument12 SeitenCertification Smafadi lamoNoch keine Bewertungen
- Embedded Debugging TechniquesDokument16 SeitenEmbedded Debugging TechniquesAhmed HamoudaNoch keine Bewertungen
- Net View - Net Session - Net File - Net Use - Windows CMD - SS64Dokument2 SeitenNet View - Net Session - Net File - Net Use - Windows CMD - SS64xavierfelix07Noch keine Bewertungen
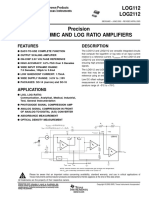
- LOG112Dokument21 SeitenLOG112Otto Lambertus0% (1)
- Fast Fourier Transform of Frequency Hopping Spread Spectrum in Noisy EnvironmentDokument5 SeitenFast Fourier Transform of Frequency Hopping Spread Spectrum in Noisy EnvironmentNaveed RamzanNoch keine Bewertungen
- Function CatalogueDokument591 SeitenFunction CatalogueAshish PatwardhanNoch keine Bewertungen
- Arduino LCD Set Up2Dokument10 SeitenArduino LCD Set Up2Mikaela MosqueraNoch keine Bewertungen
- RRUHFR01Dokument2 SeitenRRUHFR01api-3737649Noch keine Bewertungen
- Mos Word 2016 ObjectiveDokument12 SeitenMos Word 2016 ObjectiveĐình ToànNoch keine Bewertungen
- Résumé: 120 "Shri Ram Kutir", Udhna, Pandesara, Surat-394210Dokument4 SeitenRésumé: 120 "Shri Ram Kutir", Udhna, Pandesara, Surat-394210Raj AryanNoch keine Bewertungen
- Thomson M300E512Dokument24 SeitenThomson M300E512duskee4573100% (1)
- Anna University Chennai - 25, Examination Attendance SheetDokument35 SeitenAnna University Chennai - 25, Examination Attendance SheetfunhemuNoch keine Bewertungen
- State of Immersive Technologies in 2019Dokument10 SeitenState of Immersive Technologies in 2019Ankita ShrimaliNoch keine Bewertungen
- (IJCST-V8I5P3) : Gajendra R. WaniDokument4 Seiten(IJCST-V8I5P3) : Gajendra R. WaniEighthSenseGroupNoch keine Bewertungen
- GS32P06K10 01enDokument9 SeitenGS32P06K10 01enDhirender DagarNoch keine Bewertungen
- Cukurova: CJ1100PM CJ400PNDokument6 SeitenCukurova: CJ1100PM CJ400PNSaqib IqbalNoch keine Bewertungen
- Use Case ModelingDokument31 SeitenUse Case ModelingpacharneajayNoch keine Bewertungen
- Software-Defined Networking (SDN) : Antônio Marcos AlbertiDokument16 SeitenSoftware-Defined Networking (SDN) : Antônio Marcos AlbertiAmira DhorbaniNoch keine Bewertungen
- What Is A Public Information System?Dokument19 SeitenWhat Is A Public Information System?My SunshineNoch keine Bewertungen
- DS-2CD3743G1-IZUHK 4 MP IR Varifocal Dome Network Camera: Key FeaturesDokument4 SeitenDS-2CD3743G1-IZUHK 4 MP IR Varifocal Dome Network Camera: Key FeaturesSecurity STSNoch keine Bewertungen
- Contact List 11302022Dokument60 SeitenContact List 11302022Doctor Cars AutoNoch keine Bewertungen
- CPA System REST API Specification 3.5.7Dokument121 SeitenCPA System REST API Specification 3.5.7demuziovarioxf.syw.240.0Noch keine Bewertungen