Das könnte Ihnen auch gefallen
- Proyecto de Controladores en El Dominio Del TiempoDokument25 SeitenProyecto de Controladores en El Dominio Del TiemponelsonNoch keine Bewertungen
- Tarea 3 Sistemas de Control IIDokument7 SeitenTarea 3 Sistemas de Control IIAndres lugoNoch keine Bewertungen
- Proyecto 1. Propuesta de Un Circuito Controlador PID AnalogicoDokument6 SeitenProyecto 1. Propuesta de Un Circuito Controlador PID AnalogicoCristian ColínNoch keine Bewertungen
- Unidad Vi Criterio de Ziegler y NicholsDokument11 SeitenUnidad Vi Criterio de Ziegler y NicholsXavierTorresNoch keine Bewertungen
- Ziegler NicholsDokument27 SeitenZiegler NicholsJessNoch keine Bewertungen
- Sintonía de PID Por Ziegler-NicholsDokument10 SeitenSintonía de PID Por Ziegler-NicholsLuis GaliciaNoch keine Bewertungen
- Reglas Ziegler NicholsDokument11 SeitenReglas Ziegler NicholsMeny Ny100% (2)
- LAB4 Control2Dokument20 SeitenLAB4 Control2Diego ZMNoch keine Bewertungen
- Metodo de Sintonizacion Ziegler and Nichols Curva de ReaccionDokument17 SeitenMetodo de Sintonizacion Ziegler and Nichols Curva de ReaccionDamianEduardoNoch keine Bewertungen
- Algoritmo PID Discreto (Aplicación para Programación Visual Basic 6.0) Versión 1Dokument12 SeitenAlgoritmo PID Discreto (Aplicación para Programación Visual Basic 6.0) Versión 1FIDEL TOMAS MONTEZA ZEVALLOS100% (1)
- RequeDokument5 SeitenRequeRamon BalanNoch keine Bewertungen
- Tarea9 EdgarHernandez 31411239Dokument10 SeitenTarea9 EdgarHernandez 31411239Edgar HernandezNoch keine Bewertungen
- CpidDokument12 SeitenCpidjan gutiNoch keine Bewertungen
- Pid Z-NDokument12 SeitenPid Z-NEugenio Hermosilla CorderoNoch keine Bewertungen
- Selección y Ajuste de Controladores 1-MOPDokument36 SeitenSelección y Ajuste de Controladores 1-MOPDolly GarceteNoch keine Bewertungen
- Formacion Especifica Tarea ISE8 2 1Dokument35 SeitenFormacion Especifica Tarea ISE8 2 1Lau BenalcazarNoch keine Bewertungen
- Método de Ziegler y NicholsDokument11 SeitenMétodo de Ziegler y Nicholserick190796Noch keine Bewertungen
- MT221 Unidad 4 Sintonía de Controladores PID 2015-3 PDFDokument53 SeitenMT221 Unidad 4 Sintonía de Controladores PID 2015-3 PDFJose CuencaNoch keine Bewertungen
- Informe de Controladores PIDDokument20 SeitenInforme de Controladores PIDfranco_3210_Noch keine Bewertungen
- Métodos de Sintonización en Un Lazo de ControlDokument13 SeitenMétodos de Sintonización en Un Lazo de ControlayskelNoch keine Bewertungen
- Sintonizacion Coregido 1Dokument38 SeitenSintonizacion Coregido 1joana ordoñez caballeroNoch keine Bewertungen
- Trabajo Primer CorteDokument7 SeitenTrabajo Primer Cortebrayan barreraNoch keine Bewertungen
- Diseño de Controlador y Sintonización EmpíricaDokument15 SeitenDiseño de Controlador y Sintonización EmpíricaJulio Chuva Jr.Noch keine Bewertungen
- Reglas de Sintonía de Controladores PIDDokument8 SeitenReglas de Sintonía de Controladores PIDErlanDuarteNoch keine Bewertungen
- Reglas de Sintonia PID - Control de Procesos.Dokument11 SeitenReglas de Sintonia PID - Control de Procesos.AdrianRmzNoch keine Bewertungen
- Controladores DiscretosDokument12 SeitenControladores DiscretosEdmundo R. NeriaNoch keine Bewertungen
- F.C G.08 P.3 B.4Dokument12 SeitenF.C G.08 P.3 B.4HernanGascaEstradaNoch keine Bewertungen
- EL218 Unidad 4b Sintonía de Controladores PID 2023-2Dokument55 SeitenEL218 Unidad 4b Sintonía de Controladores PID 2023-2Susan Nicold TapiaNoch keine Bewertungen
- Proyecto de Motor CDDokument14 SeitenProyecto de Motor CDAlexFernandoAlexParedesNoch keine Bewertungen
- Quispillo 2158 Métodos de Control PidDokument5 SeitenQuispillo 2158 Métodos de Control PidLincoln MorenoNoch keine Bewertungen
- Introducción Control RobustoDokument32 SeitenIntroducción Control RobustoMiguel AngelNoch keine Bewertungen
- Clase 14Dokument11 SeitenClase 14cristianNoch keine Bewertungen
- Ziegler and NicholsDokument11 SeitenZiegler and NicholsJimmy Minaya BenavidesNoch keine Bewertungen
- Método de Ziegler y NicholsDokument8 SeitenMétodo de Ziegler y NicholsAxel ToscaNoch keine Bewertungen
- Practica Ziegler NicholsDokument8 SeitenPractica Ziegler NicholsjorgeNoch keine Bewertungen
- 2 Reglas de Sintonía de Controladores PID (Reparado)Dokument10 Seiten2 Reglas de Sintonía de Controladores PID (Reparado)omarNoch keine Bewertungen
- Clase14 Reglas de Sintonía de Controladores PIDDokument11 SeitenClase14 Reglas de Sintonía de Controladores PIDGiancarlos DámazoNoch keine Bewertungen
- S11.s1. Sintonizacion PID Z-NDokument11 SeitenS11.s1. Sintonizacion PID Z-NCarlos LONoch keine Bewertungen
- Reporte - Practica4 Control PIDDokument9 SeitenReporte - Practica4 Control PIDLuis Angel Martinez RamirezNoch keine Bewertungen
- Jose Vicente Cruz CruzDokument3 SeitenJose Vicente Cruz CruzJose V. CruzNoch keine Bewertungen
- P6 3MM7 MartínezPiñaVazquezDokument20 SeitenP6 3MM7 MartínezPiñaVazquezSergio ZaldívarNoch keine Bewertungen
- Sintonizacion de Contr PidDokument46 SeitenSintonizacion de Contr PidAntonio Jesus LeonNoch keine Bewertungen
- PIDDokument40 SeitenPIDAlexisVizuete100% (1)
- Pid 1Dokument12 SeitenPid 1miguelmt3012Noch keine Bewertungen
- S10 El Controlador PIDDokument17 SeitenS10 El Controlador PIDSANTIAGO NAJARRO EDINSON HERNANNoch keine Bewertungen
- Control Pid de HornoDokument20 SeitenControl Pid de HornoMr LosingNoch keine Bewertungen
- Sintonización de Controlador PID Mediante Ziegler-NicholsDokument25 SeitenSintonización de Controlador PID Mediante Ziegler-Nicholsjessie rojas bonillaNoch keine Bewertungen
- Ajuste Empirico Del Controlador PidDokument12 SeitenAjuste Empirico Del Controlador PidGrecia Palomino SalazarNoch keine Bewertungen
- 3.7 Sintonizacion de ControladoresDokument8 Seiten3.7 Sintonizacion de Controladoreskarla0% (1)
- Tarea1 PidDokument2 SeitenTarea1 PidMiguel Angel Illanes100% (1)
- Ziegler Nichols MatlabDokument5 SeitenZiegler Nichols MatlabFrank DazaNoch keine Bewertungen
- Sintonización PidDokument6 SeitenSintonización PidBryan N. GutiérrezNoch keine Bewertungen
- Practica de Informática-Análisis Del Control PidDokument11 SeitenPractica de Informática-Análisis Del Control PidLaura Sánchez CuestaNoch keine Bewertungen
- LabControl P07 Sintonía 2 S20232Dokument5 SeitenLabControl P07 Sintonía 2 S20232Leidy Tatiana Quiroga AlzateNoch keine Bewertungen
- Sintonización de Controladores PIDDokument14 SeitenSintonización de Controladores PIDCésar Augusto González García100% (1)
- UF1670 - Reparación de equipos mecánicos y eléctricos de plantas de tratamiento de agua y plantas depuradorasVon EverandUF1670 - Reparación de equipos mecánicos y eléctricos de plantas de tratamiento de agua y plantas depuradorasBewertung: 5 von 5 Sternen5/5 (1)
- Eficiencia energética en las instalaciones de calefacción y acs en los edificios. ENAC0108Von EverandEficiencia energética en las instalaciones de calefacción y acs en los edificios. ENAC0108Noch keine Bewertungen
- Procesos de Fluidos Que Requieren Bombas OMELDokument15 SeitenProcesos de Fluidos Que Requieren Bombas OMELjohn.quintanai5159Noch keine Bewertungen
- Dgti U1 A2 SutsDokument8 SeitenDgti U1 A2 SutsCarlos HernandezNoch keine Bewertungen
- Controles - Practica 3Dokument28 SeitenControles - Practica 3Mario A. MauricioNoch keine Bewertungen
- FICHA TECNICA EC4230AOW2 Arcón CongeladorDokument1 SeiteFICHA TECNICA EC4230AOW2 Arcón CongeladorFrio CoolNoch keine Bewertungen
- f44039120 Lista de Precios Mayo 2012Dokument1 Seitef44039120 Lista de Precios Mayo 2012andres silvestreNoch keine Bewertungen
- Efecto Suelo y AutorrotaciónDokument22 SeitenEfecto Suelo y Autorrotaciónjesus548Noch keine Bewertungen
- Banco Hojas de VidaDokument88 SeitenBanco Hojas de VidaGloria Contreras GarciaNoch keine Bewertungen
- Definición de CalidadDokument2 SeitenDefinición de CalidadGaby JuárezNoch keine Bewertungen
- Memoria Descriptiva Instalaciones ElectromecanicasDokument16 SeitenMemoria Descriptiva Instalaciones ElectromecanicasEder Delgado100% (1)
- Lista de Chequeo 9001Dokument18 SeitenLista de Chequeo 9001liptay mayerly rangel gilNoch keine Bewertungen
- MTC - Control de CalidadDokument11 SeitenMTC - Control de CalidadWalter Humberto Pompa MarínNoch keine Bewertungen
- PAT NG Es ClampsDokument2 SeitenPAT NG Es ClampsNicolas150956Noch keine Bewertungen
- Ingeniería & Agregados Del Caribe SASDokument9 SeitenIngeniería & Agregados Del Caribe SASAlex Yamid Martínez RapalinoNoch keine Bewertungen
- Datos de Operacion Motor ISXDokument2 SeitenDatos de Operacion Motor ISXSampre Terrestre100% (5)
- Manual PDFDokument53 SeitenManual PDFOscar Villaseñor100% (3)
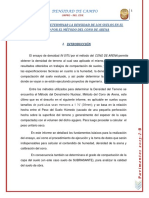
- Densidaddecampo 150623115019 Lva1 App6891Dokument12 SeitenDensidaddecampo 150623115019 Lva1 App6891David Dario Sanchez FarfanNoch keine Bewertungen
- Obras Publicas ImpresoDokument106 SeitenObras Publicas ImpresohanNoch keine Bewertungen
- CABCORP Recibe Premio Internacional A La CalidadDokument2 SeitenCABCORP Recibe Premio Internacional A La CalidadupanafrayNoch keine Bewertungen
- Electivo TRIBOLOGIADokument3 SeitenElectivo TRIBOLOGIAGonzalo Alonso QuintanaNoch keine Bewertungen
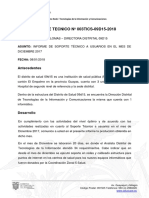
- Informe 003 Diciembre - Sat 09d15Dokument5 SeitenInforme 003 Diciembre - Sat 09d15Fausto CarchiNoch keine Bewertungen
- Check List Gestion de CambiosDokument4 SeitenCheck List Gestion de CambiosGabriel Illanes MamaniNoch keine Bewertungen
- Sistema de Registro de ClientesDokument2 SeitenSistema de Registro de ClientesALFRED ROGER MARINNoch keine Bewertungen
- ACTIVIDAD 8 Diseno FactorialDokument2 SeitenACTIVIDAD 8 Diseno FactorialYarib VenturaNoch keine Bewertungen
- Nch0666 Of1970 Cables de Acero Terminologia y ClasificacionDokument17 SeitenNch0666 Of1970 Cables de Acero Terminologia y ClasificacionMIGUEL ARRIAGADA100% (1)
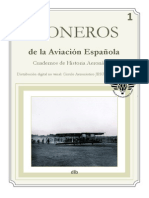
- PIONEROS Cuadernos de Hist de La Aviación Española Núm. 1Dokument24 SeitenPIONEROS Cuadernos de Hist de La Aviación Española Núm. 1jrr_woodNoch keine Bewertungen
- E5 Medida de La Energia FinalDokument5 SeitenE5 Medida de La Energia Finalluisosesti80Noch keine Bewertungen
- ROTOPALADokument4 SeitenROTOPALAMiro Junior Vasquez SarmientoNoch keine Bewertungen
- Ejercicios de Aplicación de CubiertasDokument7 SeitenEjercicios de Aplicación de Cubiertascapobeno6958Noch keine Bewertungen
- Empaque FlexibleDokument54 SeitenEmpaque FlexibleLeidy Rivera100% (1)