Das könnte Ihnen auch gefallen
- Sistemas Integrados de Manufatura e Automação IndustrialDokument43 SeitenSistemas Integrados de Manufatura e Automação Industrialjackson miguelNoch keine Bewertungen
- NBR 5419 - Parte 1 (2015)Dokument77 SeitenNBR 5419 - Parte 1 (2015)Nestor FonteneleNoch keine Bewertungen
- Atribuições de Engenheiro de Controle e Automação - Decisão CEEE Jun-2012Dokument2 SeitenAtribuições de Engenheiro de Controle e Automação - Decisão CEEE Jun-2012jackson miguelNoch keine Bewertungen
- Portão automático e máquinas industriaisDokument8 SeitenPortão automático e máquinas industriaisjackson miguel100% (1)
- Sistemas Distribuidos e Redes de Computadores para Controle e Automação IndustrialDokument276 SeitenSistemas Distribuidos e Redes de Computadores para Controle e Automação Industrialjose492432Noch keine Bewertungen
- VidrariasDokument35 SeitenVidrariasjackson miguelNoch keine Bewertungen
- 4 - Eletro PneumaticaDokument2 Seiten4 - Eletro Pneumaticajackson miguelNoch keine Bewertungen
- NBR 5410-97Dokument128 SeitenNBR 5410-97bimbatoluanaNoch keine Bewertungen
- Métodos emergentes de conservação de alimentos por radiação microondasDokument39 SeitenMétodos emergentes de conservação de alimentos por radiação microondasMárcia RodriguesNoch keine Bewertungen
- Antissuborno PDFDokument63 SeitenAntissuborno PDFAna Cristina SouzaNoch keine Bewertungen
- Simulado 23 (Mat. 5º Ano) - Blog Do Prof. WarlesDokument3 SeitenSimulado 23 (Mat. 5º Ano) - Blog Do Prof. WarlesJose Felipe Lopes100% (1)
- Multiplexadores e Demultiplexadores (ART159)Dokument12 SeitenMultiplexadores e Demultiplexadores (ART159)Valdir JuniorNoch keine Bewertungen
- Medidas de posição estatísticasDokument17 SeitenMedidas de posição estatísticasLucas Henrique AndradeNoch keine Bewertungen
- PEF5917 - Exercícios de deformação de sólidosDokument7 SeitenPEF5917 - Exercícios de deformação de sólidosJohnny LópezNoch keine Bewertungen
- Guia para certificação PBQP-HDokument26 SeitenGuia para certificação PBQP-HLorena SoaresNoch keine Bewertungen
- Os SonhosDokument58 SeitenOs SonhosAPPARATOR100% (4)
- IA 1 - Resolução de Problemas Por Meio de BuscasDokument27 SeitenIA 1 - Resolução de Problemas Por Meio de BuscasOsvaldo Geraldo ManjateNoch keine Bewertungen
- AAP - Matemática - 1 Série Do Ensino MédioDokument12 SeitenAAP - Matemática - 1 Série Do Ensino MédioWendler Santos100% (2)
- F228-ListaEx 1 GravitacaoDokument3 SeitenF228-ListaEx 1 GravitacaoJosé Carlos Salles JuniorNoch keine Bewertungen
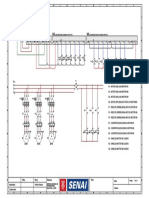
- Esquema elétrico de um sistema de controle de motoresDokument1 SeiteEsquema elétrico de um sistema de controle de motoresLuiz Carlos AguilellaNoch keine Bewertungen
- Exercícios de Fixação - TRANSCALDokument14 SeitenExercícios de Fixação - TRANSCALGabriela OliverNoch keine Bewertungen
- Lista de DeterminantesDokument7 SeitenLista de DeterminantesJoão Pedro100% (1)
- Índices preçosDokument6 SeitenÍndices preçosClara GomesNoch keine Bewertungen
- Análise Funcional Curso Pós-GraduaçãoDokument61 SeitenAnálise Funcional Curso Pós-GraduaçãoMR100% (1)
- Lei de Gauss e campos elétricosDokument15 SeitenLei de Gauss e campos elétricosMalu BarrettoNoch keine Bewertungen
- Rosalind KraussDokument14 SeitenRosalind KraussMariana GamaNoch keine Bewertungen
- Funções Polinomiais do 2o Grau: Trajetórias e AplicaçõesDokument28 SeitenFunções Polinomiais do 2o Grau: Trajetórias e AplicaçõesPapiro ReceitaNoch keine Bewertungen
- Aula 7 Cisalhamento Puro (Ajustado)Dokument27 SeitenAula 7 Cisalhamento Puro (Ajustado)Gabriela MellerNoch keine Bewertungen
- Panorama histórico da estatísticaDokument15 SeitenPanorama histórico da estatísticaEduardo Debiasi Andrade100% (1)
- Geometria Espacial - Cilindros - Exercicios PDFDokument13 SeitenGeometria Espacial - Cilindros - Exercicios PDFLukasVictorNoch keine Bewertungen
- ART Desmontagem e Montagem de PneusDokument8 SeitenART Desmontagem e Montagem de PneusGustavo MauryNoch keine Bewertungen
- DownloadDokument7 SeitenDownloadJoão PortelaNoch keine Bewertungen
- DissertaçãoDokument134 SeitenDissertaçãofabioriemannNoch keine Bewertungen
- Índices de refração de líquidos com refractômetro de AbbeDokument44 SeitenÍndices de refração de líquidos com refractômetro de AbbeTomás MahalambeNoch keine Bewertungen
- Teste de Hipóteses sobre Médias PopulacionaisDokument2 SeitenTeste de Hipóteses sobre Médias Populacionais011294feNoch keine Bewertungen
- Lotomática 2 - Valor PosicionalDokument2 SeitenLotomática 2 - Valor PosicionalGeraldo JuniorNoch keine Bewertungen
- Modelo de Black ScholesDokument60 SeitenModelo de Black ScholesEduardo FranciscoNoch keine Bewertungen
- Medidas de tendência central e dispersão em estatística descritivaDokument12 SeitenMedidas de tendência central e dispersão em estatística descritivaVera SilvaNoch keine Bewertungen