Ultra Low Noise, Offset Drift
±1 g Dual Axis Accelerometer
with Analog Outputs
MXA2500E
FEATURES
Sck Internal Temperature
Better than 1 mg resolution (optional) Oscillator Sensor
TOUT
Dual axis accelerometer fabricated on a monolithic CMOS IC
RoHS compliant Voltage
VREF
CLK Reference
On-chip mixed mode signal processing
No moving parts Continous
Heater
50,000 g shock survival rating Control
Self Test
17 Hz bandwidth expandable to >160 Hz
3V to 5.25V single supply continuous operation X axis
Low Pass
AOUTX
Filter
Small (5mm x 5mm x 2mm) surface mount package
Continuous self test
Factory Adjust
Custom programmable specifications Offset & Gain
Independent axis programmability (special order)
Low Pass
Y axis
Filter
AOUTY
APPLICATIONS 2-AXIS
SENSOR
Automotive – Vehicle Security/Active Suspension/ABS
VDD Gnd VDA
Headlight Angle Control/Tilt Sensing
Security – Gas Line/Elevator/Fatigue Sensing
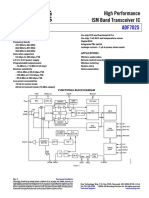
Office Equipment – Computer Peripherals/PDA’s/ MXA2500E FUNCTIONAL BLOCK DIAGRAM
Cell Phones
Gaming – Joystick/RF Interface/Menu Selection/Tilt Sensing
White Goods – Spin/Vibration Control
GENERAL DESCRIPTION
The MXA2500E is an ultra low noise and low cost, dual The MXA2500E provides two absolute analog outputs.
axis accelerometer fabricated on a standard, submicron The typical noise floor is 0.2 mg/ Hz allowing signals
CMOS process. It is a complete sensing system with on- below 1 mg to be resolved at 1 Hz bandwidth. The 3dB
chip mixed mode signal processing. The MXA2500E rolloff of the device occurs at 17 Hz but is expandable to
measures acceleration with a full-scale range of ±1 g and a >160 Hz (ref. Application Note AN-00MX-003). The
MXA2500E is available in a LCC surface mount package
sensitivity of 500mV/g @5V at 25°C. It can measure both (5 mm x 5 mm x 2 mm). It is hermetically sealed and is
dynamic acceleration (e.g., vibration) and static operational over a -40°C to +105°C temperature range. It
acceleration (e.g., gravity). The MXA2500E design is also contains an on-chip temperature sensor and a bandgap
based on heat convection and requires no solid proof mass. voltage reference.
This eliminates stiction and particle problems associated
with competitive devices and provides shock survival of Due to the standard CMOS structure of the MXA2500E,
50,000 g, leading to significantly lower failure rates and additional circuitry can easily be incorporated into custom
lower loss due to handling during assembly. versions for high volume applications. Contact the factory
for more information.
Information furnished by MEMSIC is believed to be accurate and reliable.
MEMSIC, Inc.
However, no responsibility is assumed by MEMSIC for its use, nor for any
infringements of patents or other rights of third parties which may result from
One Technology Drive Suite 325,Andover MA01810,USA
its use. No license is granted by implication or otherwise under any patent or Tel: +1 978 738 0900 Fax: +1 978 738 0196
patent rights of MEMSIC. www.memsic.com
MEMSIC MXA2500E Rev G Page 1 of 9 2/26/2007
MXA2500E SPECIFICATIONS (Measurements @ 25°C, Acceleration = 0 g unless otherwise noted; VDD, VDA = 5.0V
unless otherwise specified)
MXA2500E
Parameter Conditions Min Typ Max Units
SENSOR INPUT Each Axis
Measurement Range1 ±1.0 g
Nonlinearity Best fit straight line 0.5 1.0 % of FS
Alignment Error2 ±1.0 degree
Transverse Sensitivity3 ±2.0 %
SENSITIVITY Each Axis
Sensitivity, Analog Outputs at pins
AOUTX and AOUTY6 475 500 525 mV/g
Change over Temperature (uncompensated)4 ∆ from 25°C, at –40°C +120 %
∆ from 25°C, at +105°C -55 %
Change over Temperature (compensated) 4 ∆ from 25°C, –40°C to +105°C <3.0 %
ZERO g BIAS LEVEL Each Axis
0 g Offset6 -0.1 0.00 +0.1 g
0 g Voltage6 1.20 1.25 1.30 V
0 g Offset over Temperature ∆ from 25°C ±0.4 mg/°C
∆ from 25°C, based on 500mV/g ±0.2 mV/°C
NOISE PERFORMANCE
Noise Density, rms Without frequency compensation 0.2 0.4 mg/ Hz
FREQUENCY RESPONSE
3dB Bandwidth - uncompensated 17 Hz
3dB Bandwidth - compensated5 >160 Hz
TEMPERATURE OUTPUT
Tout Voltage 1.15 1.25 1.35 V
Sensitivity 4.6 5.0 5.4 mV/°C
VOLTAGE REFERENCE OUTPUT
VRef output @3V-5.25V supply 2.4 2.5 2.65 V
Change over Temperature 0.1 mV/°C
Current Drive Capability Source 100 µA
SELF TEST
Continuous Voltage at AOUTX, AOUTY under @5.0V Supply, output rails to
Failure supply voltage 5.0 V
Continuous Voltage at AOUTX, AOUTY under @3.0V Supply, output rails to
Failure supply voltage 3.0 V
AOUTX and AOUTY OUTPUTS
Normal Output Range @5.0V Supply 0.1 4.9 V
@3.0V Supply 0.1 2.9 V
Current Source or sink, @ 3.0V-5.25V supply 100 µA
Turn-On Time7 @5.0V Supply 160 mS
@3.0V Supply 300 mS
POWER SUPPLY
Operating Voltage Range 3.0 5.25 V
Supply Current @ 5.0V 2.7 3.3 4.1 mA
Supply Current6 @ 3.0V 3.2 4.0 4.8 mA
TEMPERATURE RANGE
Operating Range -40 +105 °C
NOTES 6
1 The device operates over a 3.0V to 5.25V supply range. Please note that
Guaranteed by measurement of initial offset and sensitivity.
2 sensitivity and zero g bias level will be slightly different at 3.0V operation.
Alignment error is specified as the angle between the true and indicated
For devices to be operated at 3.0V in production, they can be trimmed at the
axis of sensitivity.
3 factory specifically for this lower supply voltage operation, in which case the
Transverse sensitivity is the algebraic sum of the alignment and the
inherent sensitivity errors. sensitivity and zero g bias level specifications on this page will be met.
4
The sensitivity change over temperature for thermal accelerometers is based Please contact the factory for specially trimmed devices for low supply
on variations in heat transfer that are governed by the laws of physics and it is voltage operation.
7
Output settled to within ±17mg.
highly consistent from device to device. Please refer to the section in this data
sheet titled “Compensation for the Change of Sensitivity over Temperature”
for more information.
5
External circuitry is required to extend the 3dB bandwidth. (ref.
Application Note: AN-00MX-003).
MEMSIC MXA2500E Rev G Page 2 of 8 2/26/2007
ABSOLUTE MAXIMUM RATINGS* 8
Supply Voltage (VDD, VDA) ………………...-0.5 to +7.0V
1 7
Storage Temperature ……….…………-65°C to +150°C
X +g
M EM SIC
Acceleration ……………………………………..50,000 g
2 6
*Stresses above those listed under Absolute Maximum Ratings may cause permanent
damage to the device. This is a stress rating only; the functional operation of the device 3 5
at these or any other conditions above those indicated in the operational sections of this
specification is not implied. Exposure to absolute maximum rating conditions for 4
extended periods may affect device reliability.
Y +g
Package Characteristics
Top View
Package θJA θJC Device Weight
LCC-8 110°C/W 22°C/W < 1 gram
Pin Description: LCC-8 Package
Pin Name Description I/O
1 TOUT Temperature (Analog Voltage) O
2 AOUTY Y-Axis Acceleration Signal O
3 Gnd Ground I
4 VDA Analog Supply Voltage I
5 AOUTX X-Axis Acceleration Signal O
6 Vref 2.5V Reference Output O
7 Sck Optional External Clock I
8 VDD Digital Supply Voltage I
Note: The MEMSIC logo’s arrow indicates the +X sensing
Ordering Guide direction of the device. The +Y sensing direction is rotated 90°
Model Package Style away from the +X direction following the right-hand rule.
MXA2500EL LCC8 RoHS compliant Small circle indicates pin one (1).
MXA2500EF LCC8, Pb-free RoHS compliant
*LCC parts are shipped in tape and reel packaging.
Caution
ESD (electrostatic discharge) sensitive device.
MEMSIC MXA2500E Rev G Page 3 of 8 2/26/2007
THEORY OF OPERATION to be the same as the sensitivity for the x-axis, the
The MEMSIC device is a complete dual-axis acceleration accelerometer can be programmed for non-equal
measurement system fabricated on a monolithic CMOS IC sensitivities on the x- and y-axes. Contact the factory for
process. The device operation is based on heat transfer by additional information on this feature.
natural convection and operates like other accelerometers
having a proof mass except it is a gas in the MEMSIC TOUT – This pin is the buffered output of the temperature
sensor. sensor. The analog voltage at TOUT is an indication of the
die temperature. This voltage is useful as a differential
A single heat source, centered in the silicon chip is measurement of temperature from ambient and not as an
suspended across a cavity. Equally spaced absolute measurement of temperature. After correlating
aluminum/polysilicon thermopiles (groups of the voltage at TOUT to 25°C ambient, the change in this
thermocouples) are located equidistantly on all four sides voltage due to changes in the ambient temperature can be
of the heat source (dual axis). Under zero acceleration, a used to compensate for the change over temperature of the
temperature gradient is symmetrical about the heat source, accelerometer offset and sensitivity. Please refer to the
so that the temperature is the same at all four thermopiles, section on Compensation for the Change in Sensitivity
causing them to output the same voltage. Over Temperature for more information.
Acceleration in any direction will disturb the temperature Sck – The standard product is delivered with an internal
profile, due to free convection heat transfer, causing it to be clock option (800kHz). This pin should be grounded
asymmetrical. The temperature, and hence voltage output when operating with the internal clock. An external
of the four thermopiles will then be different. The clock option can be special ordered from the factory
differential voltage at the thermopile outputs is directly allowing the user to input a clock signal between 400kHz
proportional to the acceleration. There are two identical and 1.6MHz.
acceleration signal paths on the accelerometer, one to
measure acceleration in the x-axis and one to measure Vref – This pin is the output of a reference voltage. It is set
acceleration in the y-axis. Please visit the MEMSIC at 2.50V typical and has 100µA of drive capability.
website at www.memsic.com for a picture/graphic
description of the free convection heat transfer principle. COMPENSATION FOR THE CHANGE IN
SENSITIVITY OVER TEMPERATURE
PIN DESCRIPTIONS All thermal accelerometers display the same sensitivity
VDD – This is the supply input for the digital circuits and change with temperature. The sensitivity change depends
the sensor heater in the accelerometer. The DC voltage on variations in heat transfer that are governed by the laws
should be between 3.0 volts and 5.25 volts. Refer to the of physics. Manufacturing variations do not influence the
section on PCB layout and fabrication suggestions for sensitivity change, so there are no unit-to-unit differences
guidance on external parts and connections recommended. in sensitivity change. The sensitivity change is governed
by the following equation (and shown in Figure 1 in °C):
VDA – This is the power supply input for the analog
amplifiers in the accelerometer. Refer to the section on Si x Ti2.90 = Sf x Tf2.90
PCB layout and fabrication suggestions for guidance on
external parts and connections recommended. where Si is the sensitivity at any initial temperature Ti, and
Sf is the sensitivity at any other final temperature Tf with
Gnd – This is the ground pin for the accelerometer. the temperature values in °K.
AOUTX – This pin is the output of the x-axis acceleration
sensor. The user should ensure the load impedance is 2.5
Sensitivity (normalized)
sufficiently high as to not source/sink >100µA. While the 2.0
sensitivity of this axis has been programmed at the factory
1.5
to be the same as the sensitivity for the y-axis, the
1.0
accelerometer can be programmed for non-equal
sensitivities on the x- and y-axes. Contact the factory for 0.5
additional information on this feature. 0.0
-40 -20 0 20 40 60 80 100
AOUTY – This pin is the output of the y-axis acceleration Temperature (C)
sensor. The user should ensure the load impedance is
sufficiently high as to not source/sink >100µA. While the Figure 1: Thermal Accelerometer Sensitivity
sensitivity of this axis has been programmed at the factory
MEMSIC MXA2500E Rev G Page 4 of 8 2/26/2007
In gaming applications where the game or controller is X
typically used in a constant temperature environment, +900
sensitivity might not need to be compensated in hardware
MEMS IC
gravity
or software. Any compensation for this effect could be
done instinctively by the game player. 00
For applications where sensitivity changes of a few percent Y
Top View
are acceptable, the above equation can be approximated
with a linear function. Using a linear approximation, an Figure 2: Accelerometer Position Relative to Gravity
external circuit that provides a gain adjustment of –
0.9%/°C would keep the sensitivity within 10% of its room
temperature value over a 0°C to +50°C range.
For applications that demand high performance, a low cost X-Axis Y-Axis
micro-controller can be used to implement the above X-Axis
equation. A reference design using a Microchip MCU (p/n Orientation Change Change
16F873/04-SO) and MEMSIC developed firmware is To Earth’s X per deg. Y per deg.
available by contacting the factory. With this reference Surface Output of tilt Output of tilt
design, the sensitivity variation over the full temperature (deg.) (g) (mg) (g) (mg)
90 1.000 0.15 0.000 17.45
range (-40°C to +105°C) can be kept below 3%. Please
85 0.996 1.37 0.087 17.37
visit the MEMSIC web site at www.memsic.com for 80 0.985 2.88 0.174 17.16
reference design information on circuits and programs 70 0.940 5.86 0.342 16.35
including look up tables for easily incorporating sensitivity 60 0.866 8.59 0.500 15.04
compensation. 45 0.707 12.23 0.707 12.23
30 0.500 15.04 0.866 8.59
DISCUSSION OF TILT APPLICATIONS AND 20 0.342 16.35 0.940 5.86
RESOLUTION 10 0.174 17.16 0.985 2.88
Tilt Applications: One of the most popular applications 5 0.087 17.37 0.996 1.37
0 0.000 17.45 1.000 0.15
of the MEMSIC accelerometer product line is in
Table 1: Changes in Tilt for X- and Y-Axes
tilt/inclination measurement. An accelerometer uses the
force of gravity as an input to determine the inclination
Resolution: The accelerometer resolution is limited by
angle of an object.
noise. The output noise will vary with the measurement
bandwidth. With the reduction of the bandwidth, by
A MEMSIC accelerometer is most sensitive to changes in
applying an external low pass filter, the output noise drops.
position, or tilt, when the accelerometer’s sensitive axis is
Reduction of bandwidth will improve the signal to noise
perpendicular to the force of gravity, or parallel to the
ratio and the resolution. The output noise scales directly
Earth’s surface. Similarly, when the accelerometer’s axis
with the square root of the measurement bandwidth. The
is parallel to the force of gravity (perpendicular to the
maximum amplitude of the noise, its peak- to- peak value,
Earth’s surface), it is least sensitive to changes in tilt.
approximately defines the worst case resolution of the
measurement. With a simple RC low pass filter, the rms
Table 1 and Figure 2 help illustrate the output changes in
noise is calculated as follows:
the X- and Y-axes as the unit is tilted from +90° to 0°.
Notice that when one axis has a small change in output per
degree of tilt (in mg), the second axis has a large change in Noise (mg rms) = Noise(mg/ Hz ) * ( Bandwidth( Hz ) *1.6)
output per degree of tilt. The complementary nature of
these two signals permits low cost accurate tilt sensing to The peak-to-peak noise is approximately equal to 6.6 times
be achieved with the MEMSIC device (reference the rms value (for an average uncertainty of 0.1%).
application note AN-00MX-007).
EXTERNAL FILTERS
AC Coupling: For applications where only dynamic
accelerations (vibration) are to be measured, it is
recommended to ac couple the accelerometer output as
shown in Figure 3. The advantage of ac coupling is that
variations from part to part of zero g offset and zero g
offset versus temperature can be eliminated. Figure 3 is a
HPF (high pass filter) with a –3dB breakpoint given by the
MEMSIC MXA2500E Rev G Page 5 of 8 2/26/2007
equation: f = 1 . In many applications it may be compensating circuit does not require adjustment for
2πRC individual units.
desirable to have the HPF –3dB point at a very low
frequency in order to detect very low frequency A simple compensating network comprising two
accelerations. Sometimes the implementation of this HPF operational amplifiers and a few resistors and capacitors
may result in unreasonably large capacitors, and the provides increasing gain with increasing frequency (see
designer must turn to digital implementations of HPFs Figure 5). The circuit shown is for an absolute output
where very low frequency –3dB breakpoints can be accelerometer operating at 5 V supply. It provides a DC
achieved. gain of X2, so the offset at the output is 2.5V and the
sensitivity is doubled. The 14.3 KΩ and the 5.9KΩ
resistors along with the non-polarized 0.82µF capacitors
C tune the gain of the network to compensate for the output
A O UT X A O UT X
Filtered attenuation at the higher frequencies. The resistors and the
O utput capacitors provide noise reduction and stability.
R
14.3K 5.9K
C 1.5uF 0.01uF
A O UT Y A O UTY
Filtered
R O utput
UA
Aout X or Y -
8.06K 160K
+
Figure 3: High Pass Filter
0.047uF 0.0022uF
Low Pass Filter: An external low pass filter is useful in
low frequency applications such as tilt or inclination. The
low pass filter limits the noise floor and improves the
resolution of the accelerometer. The low pass filter shown 14.3K 5.9K
in Figure 4 has a –3dB breakpoint given by the equation:
1.5uF 0.01uF
f =1 . For the 200 Hz ratiometric output device
2πRC
filter, C=0.1µF and R=8kΩ, ±5%, 1/8W.
UB
Freq. Comp. Output
- 8.06K
+
A O UT X R A O UTX 60
0.047uF
45
Filtered
30
C Output
Amplitude - dB
15
A O UTY R A O UT Y -15
Figure 5: Frequency Response Extension Circuit
Filtered -30
C Output -45
The accelerometer response (bottom trace), the network
-60
response10 (top trace) and the compensated
10 0 response (middle
10 00
F req ue ncy - H z
trace) are shown in Figure 6. The amplitude remains above
–3db beyond 100 Hz, and there is useable signal well
Figure 4: Low Pass Filter
after this frequency.
COMPENSATION FOR EXTENDING THE
FREQUENCY RESPONSE
The response of the thermal accelerometer is a function of
the internal gas physical properties, the natural convection
mechanism and the sensor electronics. Since the gas
properties of MEMSIC's mass produced accelerometer are
uniform, a simple circuit can be used to equally
compensate all sensors. For most applications, the
MEMSIC MXA2500E Rev G Page 6 of 8 2/26/2007
2
Change = a * Temperature + b * Temperature + c
where a,b,c are unique constants for each accelerometer.
Figure 6: Amplitude Frequency Response In normal operation the processor calculates the output:
Compensated Output = Acceleration – Change.
COMPENSATION FOR ZERO G OFFSET CHANGE
For a more detail discussion of temperature compensation
OVER TEMPERATURE
reference MEMSIC application note #AN-00MX-002.
In applications where a stable zero g offset is required, and
where the AC coupling external filter described earlier can
not be used, analog or digital temperature compensation
TEMPERATURE OUTPUT NOISE REDUCTION
can be applied. The compensation requires individual
It is recommended that a simple RC low pass filter is used
calibration because the magnitude of the zero g offset
when measuring the temperature output. Temperature
change over temperature is different for each unit. To
output is typically a very slow changing signal, so a very
compensate the change, a calibrated temperature
low frequency filter eliminates erroneous readings that may
dependent signal equal in magnitude but with opposite
result from the presence of higher frequency noise. A
polarity is added to the accelerometer output. The circuit
simple filter is shown in Figure 8.
in Figure 7 shows a circuit example applying an analog
linear compensation technique. In this circuit the
accelerometer temperature sensor output is added to or 8.2K
subtracted from the accelerometer output. The calibration TOUT Filtered TOUT
sequence is: start at room temperature with the 100K pot
set so that its wiper is at Vref. Next, soak the accelerometer MEMSIC 0.1uF
at the expected extreme temperature and observe the Accel.
direction of the change. Then set the switch to the non-
inverting input if the change is negative or vice versa.
Finally, adjust the 100K pot while monitoring the circuit
output, until the zero g offset change is removed. Figure 8: Temperature Output Noise Reduction
POWER SUPPLY NOISE REJECTION
Vref
Two capacitors and a resistor are recommended for best
10K 100K
+5V rejection of power supply noise (reference Figure 9 below).
10K
Aoutx or y The capacitors should be located as close as possible to the
SW SPDT 100K
+
zero g drift
compensated device supply pins (VDA, VDD). The capacitor lead length
100K -
should be as short as possible, and surface mount
Tout
100K capacitors are preferred. For typical applications,
10K
capacitors C1 and C2 can be ceramic 0.1 µF, and the
Aoutx or y
resistor R can be 10 Ω.
100K 100K
V SUPPLY
Figure 7: Zero g Offset Temperature Compensation Circuit
Various digital compensation techniques can be applied
using a similar concept. Digital techniques can provide C1 R C2
better compensation because they can compensate for non-
linear zero g offset vs. temperature. A micro-controller or
micro-processor would perform the compensation. The VDA VDD
acceleration signal and the temperature signal would be
digitized using an analog to digital converter. Like in the MEMSIC
Accelerometer
analog compensation, the first step is to test and
characterize the zero g change. The purpose of the
characterization is to create a look up table or to estimate a Figure 9: Power Supply Noise Rejection
mathematical representation of the change. For example,
the change could be characterized by an equation of the PCB LAYOUT AND FABRICATION SUGGESTIONS
form: 1. The Sck pin should be grounded to minimize noise.
MEMSIC MXA2500E Rev G Page 7 of 8 2/26/2007
2. Liberal use of ceramic bypass capacitors is 5. A metal ground plane should be added directly
recommended. beneath the MEMSIC device. The size of the ground
3. Robust low inductance ground wiring should be used. plane should be similar to the MEMSIC device’s
4. Care should be taken to ensure there is “thermal footprint and be as thick as possible.
symmetry” on the PCB immediately surrounding the 6. Vias can be added symmetrically around the ground
MEMSIC device and that there is no significant heat plane. Vias increase thermal isolation of the device
source nearby. from the rest of the PCB.
PACKAGE DRAWING
Fig 10: Hermetically Sealed Package Outline
MEMSIC MXA2500E Rev G Page 8 of 8 2/26/2007
Mouser Electronics
Authorized Distributor
Click to View Pricing, Inventory, Delivery & Lifecycle Information:
MEMSIC:
MXA2500EL
Das könnte Ihnen auch gefallen
- MXD2020EDokument8 SeitenMXD2020Eapi-3695729Noch keine Bewertungen
- Low Cost Accelerometer With Analog Output: 100 G Single AxisDokument5 SeitenLow Cost Accelerometer With Analog Output: 100 G Single AxispejanssoNoch keine Bewertungen
- Adxl103 203Dokument16 SeitenAdxl103 203Eduardo Citti Truck CenterNoch keine Bewertungen
- LA1136NDokument28 SeitenLA1136NВячеслав ГлушакNoch keine Bewertungen
- Low Cost 1.2 G Dual Axis Accelerometer ADXL213: Features General DescriptionDokument12 SeitenLow Cost 1.2 G Dual Axis Accelerometer ADXL213: Features General DescriptionjosmelNoch keine Bewertungen
- Small, Low Power, 3-Axis 3 G Accelerometer ADXL335: Features General DescriptionDokument16 SeitenSmall, Low Power, 3-Axis 3 G Accelerometer ADXL335: Features General DescriptionRaman IyerNoch keine Bewertungen
- ADXRS150: 150°/s Single Chip Yaw Rate Gyro With Signal ConditioningDokument12 SeitenADXRS150: 150°/s Single Chip Yaw Rate Gyro With Signal ConditioningFargham SandhuNoch keine Bewertungen
- ADXRS150: 150°/s Single Chip Yaw Rate Gyro With Signal ConditioningDokument12 SeitenADXRS150: 150°/s Single Chip Yaw Rate Gyro With Signal ConditioningFargham SandhuNoch keine Bewertungen
- Low Cost 1.2 G Dual Axis Accelerometer ADXL213: Features General DescriptionDokument12 SeitenLow Cost 1.2 G Dual Axis Accelerometer ADXL213: Features General DescriptionMarlon PerinNoch keine Bewertungen
- 200Mhz Cursor Readout Analog Oscilloscope: FeaturesDokument2 Seiten200Mhz Cursor Readout Analog Oscilloscope: Featuresdani385arNoch keine Bewertungen
- Adxl326 PDFDokument16 SeitenAdxl326 PDFsumit kathuriaNoch keine Bewertungen
- High Performance, ISM Band, FSK/ASK Transceiver IC: Data SheetDokument47 SeitenHigh Performance, ISM Band, FSK/ASK Transceiver IC: Data SheetSsr ShaNoch keine Bewertungen
- 50 V Ultra-Low Noise FOC Motor Controller: Features and Benefits DescriptionDokument26 Seiten50 V Ultra-Low Noise FOC Motor Controller: Features and Benefits Descriptionsanthosha rkNoch keine Bewertungen
- ACS70310 11 DatasheetDokument30 SeitenACS70310 11 DatasheetbillNoch keine Bewertungen
- High Performance FSK/ASK Transceiver IC: Data SheetDokument45 SeitenHigh Performance FSK/ASK Transceiver IC: Data Sheetআশিক পালোয়ানNoch keine Bewertungen
- Low Cost Accelerometers With Digital Output ADXL202/ADXL210: G/ HZ Allowing Signals Below 5 MG To Be ResolvedDokument1 SeiteLow Cost Accelerometers With Digital Output ADXL202/ADXL210: G/ HZ Allowing Signals Below 5 MG To Be ResolvedmhasansharifiNoch keine Bewertungen
- Low Cost Accelerometers With Digital Output ADXL202/ADXL210: G/ HZ Allowing Signals Below 5 MG To Be ResolvedDokument11 SeitenLow Cost Accelerometers With Digital Output ADXL202/ADXL210: G/ HZ Allowing Signals Below 5 MG To Be ResolvedmhasansharifiNoch keine Bewertungen
- ADF7021-NBCPZ ADF7021-NBCPZ. ADF7021-NBCPZ-RL7 Eval - ADF7021-NDB9Z Eval - ADF7021-NDBIZDokument69 SeitenADF7021-NBCPZ ADF7021-NBCPZ. ADF7021-NBCPZ-RL7 Eval - ADF7021-NDB9Z Eval - ADF7021-NDBIZTuần Hào ĐỗNoch keine Bewertungen
- Single/Dual Axis I Accelerometers ADXL150/ADXL250: 65 G To 650 G, Low Noise, Low PowerDokument15 SeitenSingle/Dual Axis I Accelerometers ADXL150/ADXL250: 65 G To 650 G, Low Noise, Low PowerperezamorimNoch keine Bewertungen
- Easygen - Exciter-10: Salient FeaturesDokument4 SeitenEasygen - Exciter-10: Salient Featureszakie0690Noch keine Bewertungen
- TW28 Datasheet D4en PDFDokument80 SeitenTW28 Datasheet D4en PDFiustinianNoch keine Bewertungen
- DTS Tkda 08-2019 EngDokument2 SeitenDTS Tkda 08-2019 EngErick PerezNoch keine Bewertungen
- sc70 enDokument1 Seitesc70 enRick ChenNoch keine Bewertungen
- Camara Domo CNB LBM20SDokument1 SeiteCamara Domo CNB LBM20STecnoSmartNoch keine Bewertungen
- ATS601LSG: Single-Element Tooth-Detecting Speed Sensor ICDokument14 SeitenATS601LSG: Single-Element Tooth-Detecting Speed Sensor ICSakthivel PNoch keine Bewertungen
- High Performance ISM Band Transceiver IC: Data SheetDokument41 SeitenHigh Performance ISM Band Transceiver IC: Data SheetTuần Hào ĐỗNoch keine Bewertungen
- Semiconductor Technical Data: Table 1: Hardware FeaturesDokument9 SeitenSemiconductor Technical Data: Table 1: Hardware FeaturesspotNoch keine Bewertungen
- High Performance, ISM Band, FSK/ASK Transceiver IC ADF7020: FeaturesDokument48 SeitenHigh Performance, ISM Band, FSK/ASK Transceiver IC ADF7020: FeaturesDNoch keine Bewertungen
- Product Brief QN8036: High Performance Digital FM Transceiver For Portable DevicesDokument3 SeitenProduct Brief QN8036: High Performance Digital FM Transceiver For Portable Devicesdeena.karan5281Noch keine Bewertungen
- Akai 265dDokument2 SeitenAkai 265dVagabundi GackenholzNoch keine Bewertungen
- Service Manual: Argentine ModelDokument39 SeitenService Manual: Argentine ModelDiego BandeiraNoch keine Bewertungen
- Id210 SpecsDokument8 SeitenId210 Specsrose HNoch keine Bewertungen
- SPC1 Series SPC1 Series: Single-Phase, Power ControllerDokument6 SeitenSPC1 Series SPC1 Series: Single-Phase, Power Controllerexcind loperaNoch keine Bewertungen
- Vibration Motor Sensor Meme TypeDokument42 SeitenVibration Motor Sensor Meme TypeBala KrishnanNoch keine Bewertungen
- Low-Cost With Duty Cycle Output: 2 G Dual-Axis AccelerometerDokument12 SeitenLow-Cost With Duty Cycle Output: 2 G Dual-Axis AccelerometerpraveensahNoch keine Bewertungen
- ALM-012 Sid Guts Deluxe' - Operation ManualDokument14 SeitenALM-012 Sid Guts Deluxe' - Operation Manualshawil71Noch keine Bewertungen
- Circuit Note: Fully Automatic High Performance Conductivity Measurement SystemDokument10 SeitenCircuit Note: Fully Automatic High Performance Conductivity Measurement SystemSupolNoch keine Bewertungen
- Easygen - Exciter-10: Salient FeaturesDokument4 SeitenEasygen - Exciter-10: Salient FeaturesAbdallah AbdelrehimNoch keine Bewertungen
- XTi2 DataSheet Lowres 121914 PDFDokument2 SeitenXTi2 DataSheet Lowres 121914 PDFubaldo caraballoNoch keine Bewertungen
- vb5 Portable Data Collector Datasheet - 111M6572Dokument6 Seitenvb5 Portable Data Collector Datasheet - 111M6572Guillermo CardozoNoch keine Bewertungen
- Features Descriptio: LTC1736 5-Bit Adjustable High Efficiency Synchronous Step-Down Switching RegulatorDokument28 SeitenFeatures Descriptio: LTC1736 5-Bit Adjustable High Efficiency Synchronous Step-Down Switching RegulatorCarlos Henrique RibasNoch keine Bewertungen
- GE Logiq-200-Pro - TrainingDokument39 SeitenGE Logiq-200-Pro - Trainingsongtao yinNoch keine Bewertungen
- Single Channel Strip Amplifiers: SeriesDokument2 SeitenSingle Channel Strip Amplifiers: SeriesHanns JorgNoch keine Bewertungen
- Integrated Dual-Axis Gyro IDG-1215: Features General DescriptionDokument8 SeitenIntegrated Dual-Axis Gyro IDG-1215: Features General Descriptionsamsonit1Noch keine Bewertungen
- Epoch LT EN 201405 Web PDFDokument2 SeitenEpoch LT EN 201405 Web PDFalexmontellNoch keine Bewertungen
- GX GFDokument4 SeitenGX GFMohamed AlaaNoch keine Bewertungen
- Great Sound From Your Factory Radio: 2 Channel Active Line Output Converter With AccubassDokument2 SeitenGreat Sound From Your Factory Radio: 2 Channel Active Line Output Converter With AccubassGaudencio Alberco vilcayauriNoch keine Bewertungen
- SERIES Ver.2: Amplifier Built-In Extraordinarily Small and Slim SizeDokument14 SeitenSERIES Ver.2: Amplifier Built-In Extraordinarily Small and Slim SizeaNoch keine Bewertungen
- vb7 Datasheet 116m5255-1Dokument8 Seitenvb7 Datasheet 116m5255-1ReginaldoVieiradaSilvaNoch keine Bewertungen
- Material 78211438V44-2Dokument3 SeitenMaterial 78211438V44-2Antonio MorenoNoch keine Bewertungen
- I010-E1-03 3g3iv Users ManualDokument71 SeitenI010-E1-03 3g3iv Users ManualHaresh vaghelaNoch keine Bewertungen
- Installation and Operation Manual: Agile ModulatorDokument8 SeitenInstallation and Operation Manual: Agile ModulatorRodrigo CarvajalNoch keine Bewertungen
- True Zero-Speed, High Accuracy Gear Tooth Sensor IC: ATS667LSGDokument14 SeitenTrue Zero-Speed, High Accuracy Gear Tooth Sensor IC: ATS667LSGAnonymous f6goFflg3TNoch keine Bewertungen
- Amplifiers: Model 30S1G6Dokument6 SeitenAmplifiers: Model 30S1G6raj1388Noch keine Bewertungen
- Adcmxl 3021Dokument50 SeitenAdcmxl 3021MatheusMatteiVavassoriNoch keine Bewertungen
- Sabre Genesis - BrochureDokument2 SeitenSabre Genesis - BrochureSreejith SwaminathanNoch keine Bewertungen
- Sabre Genesis ENGDokument2 SeitenSabre Genesis ENGanon_651906433Noch keine Bewertungen
- SSH-G01: Hall-Effect Gear Tooth Speed and Direction SensorDokument3 SeitenSSH-G01: Hall-Effect Gear Tooth Speed and Direction SensorVahn RaymundoNoch keine Bewertungen
- Tiduby 4 ADokument47 SeitenTiduby 4 ArichatNoch keine Bewertungen
- Chap. 8 Integrated-Circuit Logic Families: Chapter Outcomes (Objectives)Dokument62 SeitenChap. 8 Integrated-Circuit Logic Families: Chapter Outcomes (Objectives)estraj1954Noch keine Bewertungen
- An10587 PDFDokument11 SeitenAn10587 PDFestraj1954Noch keine Bewertungen
- Uart Spi I2cDokument17 SeitenUart Spi I2cestraj1954100% (1)
- P-Values Explained by Data Scientist For Data ScientistsDokument8 SeitenP-Values Explained by Data Scientist For Data Scientistsestraj1954Noch keine Bewertungen
- Devotional When God SpeaksDokument8 SeitenDevotional When God Speaksestraj1954Noch keine Bewertungen
- Parallel I/O Interface: Memory Actuator Output DeviceDokument14 SeitenParallel I/O Interface: Memory Actuator Output Deviceestraj1954Noch keine Bewertungen
- Spi I2c UartDokument1 SeiteSpi I2c Uartestraj1954100% (1)
- Deep Learning Tutorial: Release 0.1Dokument137 SeitenDeep Learning Tutorial: Release 0.1estraj1954Noch keine Bewertungen
- An 10587Dokument11 SeitenAn 10587estraj1954Noch keine Bewertungen
- Biological Sensors: Unit-IiiDokument64 SeitenBiological Sensors: Unit-Iiiestraj1954Noch keine Bewertungen
- Lecture Notes Methods of Mathematical Physics MATHDokument71 SeitenLecture Notes Methods of Mathematical Physics MATHestraj1954Noch keine Bewertungen
- Development of A Perforated Diffusive Muffler For A Regenerative BlowerDokument8 SeitenDevelopment of A Perforated Diffusive Muffler For A Regenerative Blowerestraj1954Noch keine Bewertungen
- Clock Oscillators Surface Mount Type KC3225A-C3 Series: Features How To OrderDokument1 SeiteClock Oscillators Surface Mount Type KC3225A-C3 Series: Features How To Orderestraj1954Noch keine Bewertungen
- IDT SensingTechandSensorSolutions OVR 2018117Dokument16 SeitenIDT SensingTechandSensorSolutions OVR 2018117estraj1954Noch keine Bewertungen
- TLT-2 Tilt Sensor Rev01.5 DSDokument4 SeitenTLT-2 Tilt Sensor Rev01.5 DSestraj1954Noch keine Bewertungen
- Measurement Instrumentation PDFDokument10 SeitenMeasurement Instrumentation PDFestraj1954Noch keine Bewertungen
- Bidirectional Current Source-TIDokument9 SeitenBidirectional Current Source-TIestraj1954100% (1)
- Code:: Ckielstra SuggestionDokument37 SeitenCode:: Ckielstra Suggestionestraj1954100% (1)
- Chapter6 4700E Electrochemical SensorsDokument34 SeitenChapter6 4700E Electrochemical Sensorsestraj19540% (1)
- Let Us C Yashwant Kanetkar PDFDokument107 SeitenLet Us C Yashwant Kanetkar PDFmorigasakiNoch keine Bewertungen
- Pulse Oxy Meter SchematicDokument5 SeitenPulse Oxy Meter Schematicestraj1954Noch keine Bewertungen
- Tutorial On Polyphase TransformsDokument10 SeitenTutorial On Polyphase Transformsestraj1954Noch keine Bewertungen
- EEE 529 Microsystems: Amperometric BiosensorsDokument37 SeitenEEE 529 Microsystems: Amperometric Biosensorsestraj1954Noch keine Bewertungen
- Lec 1 Introduction Frequencty ResponseDokument61 SeitenLec 1 Introduction Frequencty ResponseAli AhmadNoch keine Bewertungen
- Mechatronic Simulations With NX Motion and Matlab /simulink: White PaperDokument17 SeitenMechatronic Simulations With NX Motion and Matlab /simulink: White Paperkfathi55Noch keine Bewertungen
- Unit-5 - Detection of Radar Signals in NoiseDokument39 SeitenUnit-5 - Detection of Radar Signals in NoiseMani PrinceNoch keine Bewertungen
- Describing Function Analysis Using Matlab and Simulink Carla Schwartz Richard Gran 8sDokument8 SeitenDescribing Function Analysis Using Matlab and Simulink Carla Schwartz Richard Gran 8sRama Mohana Reddy KarnatiNoch keine Bewertungen
- Electrical Circuits LabDokument64 SeitenElectrical Circuits LabraveendrababupNoch keine Bewertungen
- Demo Guide - M8190-91011 v3.4Dokument24 SeitenDemo Guide - M8190-91011 v3.4Abdelgader MAhmoudNoch keine Bewertungen
- Ec2255 - Control SystemDokument42 SeitenEc2255 - Control Systemselvi0412Noch keine Bewertungen
- Continuous & Discreate Control SystemsDokument71 SeitenContinuous & Discreate Control Systemssatishdanu5955Noch keine Bewertungen
- Model SM7 User Guide: Specifications Type Frequency ResponseDokument2 SeitenModel SM7 User Guide: Specifications Type Frequency Responsetorosross6062Noch keine Bewertungen
- JVC Car Stereo ManualDokument51 SeitenJVC Car Stereo ManualErvin TanigNoch keine Bewertungen
- Acelerometer CTCDokument7 SeitenAcelerometer CTCJose Luis RattiaNoch keine Bewertungen
- SpectreRF OhioDokument110 SeitenSpectreRF OhioPratap P PratapNoch keine Bewertungen
- Advanced Modal AnalysisDokument8 SeitenAdvanced Modal Analysispriyankar007Noch keine Bewertungen
- Expt-4 - Hanumanthu Venkata Rao - 20EE30013Dokument40 SeitenExpt-4 - Hanumanthu Venkata Rao - 20EE30013ChestaNoch keine Bewertungen
- Philips NTRX710Dokument33 SeitenPhilips NTRX710supermax900Noch keine Bewertungen
- Lab 7 and 8 Frequency and BandwidthDokument4 SeitenLab 7 and 8 Frequency and BandwidthwistfulmemoryNoch keine Bewertungen
- Motorola C-Quam AM Stereo System For Exciter Model 1300 and Monitor Model 1310 Manual PDFDokument170 SeitenMotorola C-Quam AM Stereo System For Exciter Model 1300 and Monitor Model 1310 Manual PDFMichael WilkinsonNoch keine Bewertungen
- A Procedure To Develop Elevation-Area-Capacity Curves of Reservoirs From Depth Sounding SurveysDokument5 SeitenA Procedure To Develop Elevation-Area-Capacity Curves of Reservoirs From Depth Sounding SurveysDragomirescu AndreiNoch keine Bewertungen
- PHD Jun Bum Kwon E PDF PDFDokument172 SeitenPHD Jun Bum Kwon E PDF PDFRafik CherniNoch keine Bewertungen
- 3 Phase Grid Connected PV Inverter PSIMDokument15 Seiten3 Phase Grid Connected PV Inverter PSIMshrikrisNoch keine Bewertungen
- Kistler - Pieozoelectric TheoryDokument12 SeitenKistler - Pieozoelectric TheoryOnur Deniz NarinNoch keine Bewertungen
- DC/DC Converter Stability Measurement: Bode 100 - Application NoteDokument18 SeitenDC/DC Converter Stability Measurement: Bode 100 - Application NotekoolniranNoch keine Bewertungen
- Yeditepe University Department of Electrical and Electronics Engineering Ee333 Analog Circuits Laboraory Experiment 1: Frequency Response of OpampDokument3 SeitenYeditepe University Department of Electrical and Electronics Engineering Ee333 Analog Circuits Laboraory Experiment 1: Frequency Response of OpampmithatNoch keine Bewertungen
- Icepower 1000 AMK2Dokument16 SeitenIcepower 1000 AMK2henrycervantes4Noch keine Bewertungen
- Seminar Report FinalDokument28 SeitenSeminar Report Finalgokul_iyer200150% (6)
- Direct Frequency Response Analysis: Workshop Problem 5Dokument28 SeitenDirect Frequency Response Analysis: Workshop Problem 5engineer83Noch keine Bewertungen
- FRAnalyzer User ManualDokument114 SeitenFRAnalyzer User ManualRenato Capelini100% (1)
- BJT Frequency ResponseDokument48 SeitenBJT Frequency ResponseMirl JohvanNoch keine Bewertungen
- Chapter 10: Frequency Response Techniques 1Dokument60 SeitenChapter 10: Frequency Response Techniques 1CesarNoch keine Bewertungen
- 8565a OsmDokument463 Seiten8565a Osmjrumianowski100% (1)