Das könnte Ihnen auch gefallen
- Swinburne'S Test: AIM: To Pre-Determine The Efficiency of A D.C Shunt Machine by PerformingDokument6 SeitenSwinburne'S Test: AIM: To Pre-Determine The Efficiency of A D.C Shunt Machine by PerformingAshutosh SharmaNoch keine Bewertungen
- Drives and Control Lab ManualDokument36 SeitenDrives and Control Lab ManualKabilanNoch keine Bewertungen
- Closed Loop Control of Separately Excited DC MotorDokument13 SeitenClosed Loop Control of Separately Excited DC MotorJAIRAJ MIRASHINoch keine Bewertungen
- Magnetization Characteristics of A D.C. Shunt Generator: Exp. No: DateDokument60 SeitenMagnetization Characteristics of A D.C. Shunt Generator: Exp. No: DateSuyash SinghNoch keine Bewertungen
- Industrial Drives Lab File PDFDokument19 SeitenIndustrial Drives Lab File PDFMayankJainNoch keine Bewertungen
- Expt - 1 - SCR IGBT and MOSFET CharacteristicsDokument16 SeitenExpt - 1 - SCR IGBT and MOSFET CharacteristicsGaurav Verma100% (2)
- Electric Drive Lab Laboratory Manual: Dev Bhoomi Institute Chakrata Road, Navgaoun Manduwala, UttarakhandDokument15 SeitenElectric Drive Lab Laboratory Manual: Dev Bhoomi Institute Chakrata Road, Navgaoun Manduwala, Uttarakhandjaya mishraNoch keine Bewertungen
- Viva Questions On AlternatorsDokument6 SeitenViva Questions On AlternatorsKashif Hussain RazwiNoch keine Bewertungen
- Brake Test On 3 Phase Slip Ring Induction MotorDokument5 SeitenBrake Test On 3 Phase Slip Ring Induction MotorRajeev Sai0% (1)
- Question Bank For Electric DrivesDokument10 SeitenQuestion Bank For Electric DrivesPradosh100% (1)
- Sreekavithaengineerig College: Scott Connection of TransformersDokument4 SeitenSreekavithaengineerig College: Scott Connection of Transformersmandadi_saileshNoch keine Bewertungen
- BEEE Important Questions 16 MarksDokument5 SeitenBEEE Important Questions 16 Marksaeroheroz25% (4)
- Speed Control of Three Phase Slip Ring Induction Motor at Variable Load ConditionDokument3 SeitenSpeed Control of Three Phase Slip Ring Induction Motor at Variable Load Conditionhi100% (1)
- Field TestDokument5 SeitenField Testkudupudinagesh100% (3)
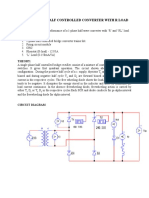
- DC Series Motor Single Phase Half & Full Controlled DrivesDokument11 SeitenDC Series Motor Single Phase Half & Full Controlled DrivesUjjal Dey100% (1)
- Single Phase Half Controlled Converter With R LoadDokument3 SeitenSingle Phase Half Controlled Converter With R LoadB ANIL KUMARNoch keine Bewertungen
- Load Test On DC Shunt GeneratorDokument3 SeitenLoad Test On DC Shunt Generatormani100% (2)
- Power Electronics - 2 MARKSDokument30 SeitenPower Electronics - 2 MARKSkarthik kumar50% (4)
- MP Electrical Drives Lab ManualDokument37 SeitenMP Electrical Drives Lab ManualSoumiya Srinivasan100% (1)
- DC Motor 2 Marks QuestionsDokument3 SeitenDC Motor 2 Marks QuestionsAbhishek100% (1)
- Line-Commutated and Active PWMDokument2 SeitenLine-Commutated and Active PWMAnonymous HyOfbJ650% (2)
- Electrical and Electronics Measurements and Instrumentation-77-Đã Chuyển ĐổiDokument9 SeitenElectrical and Electronics Measurements and Instrumentation-77-Đã Chuyển ĐổiNguyên Nguyễn SơnNoch keine Bewertungen
- Question Bank Subject: Protection and Switchgear Sem / Year: Iv/Ii Unit - 1 Part - ADokument4 SeitenQuestion Bank Subject: Protection and Switchgear Sem / Year: Iv/Ii Unit - 1 Part - Abhuvana_eee100% (2)
- Study of Bridge Rectifier: ObjectivesDokument3 SeitenStudy of Bridge Rectifier: ObjectivesDeepak KumbharNoch keine Bewertungen
- Synchronization of Alternator With Bus BarDokument5 SeitenSynchronization of Alternator With Bus BarHaritha RkNoch keine Bewertungen
- 2 - To Study The Speed Control of DC Shunt Motor by Armature Control and Field Control MethodDokument4 Seiten2 - To Study The Speed Control of DC Shunt Motor by Armature Control and Field Control Methodbhavesh1863100% (1)
- Experiment No.3-Voltage Regulation of A 3-Phase Alternator by ZPF and ASA MethodDokument6 SeitenExperiment No.3-Voltage Regulation of A 3-Phase Alternator by ZPF and ASA Method61EEPrabhat Pal100% (1)
- Swinburne S Test On DC Shunt MotorDokument5 SeitenSwinburne S Test On DC Shunt Motortamann2004Noch keine Bewertungen
- Power System Reactance Diagram Questions PDFDokument22 SeitenPower System Reactance Diagram Questions PDFHota bNoch keine Bewertungen
- Brake Test On DC Shunt MotorDokument5 SeitenBrake Test On DC Shunt MotorkudupudinageshNoch keine Bewertungen
- Power Electronics Question BankDokument3 SeitenPower Electronics Question BankHarish SudhanNoch keine Bewertungen
- 7.noload and Blocked Rotor Test On Singlephase Induction MotorDokument5 Seiten7.noload and Blocked Rotor Test On Singlephase Induction Motormandadi_sailesh100% (2)
- PSOC 2 Marks With AnswerDokument10 SeitenPSOC 2 Marks With AnswerAnbalagan GuruNoch keine Bewertungen
- Electrical Machines-II QuestionsDokument2 SeitenElectrical Machines-II QuestionsHari Reddy0% (1)
- Electrical Machines II Lab ManualDokument28 SeitenElectrical Machines II Lab ManualAnith Krishnan83% (6)
- Cycloconverter: 3.1 Principle of Operation of CycloconverterDokument19 SeitenCycloconverter: 3.1 Principle of Operation of CycloconverterS JainNoch keine Bewertungen
- Ee6711 PSS Lab Viva QuestionsDokument10 SeitenEe6711 PSS Lab Viva QuestionsshreeNoch keine Bewertungen
- Sem QuestionsDokument11 SeitenSem QuestionsRojaNoch keine Bewertungen
- Exp. 4 - Determination of V Curves and Inverted V Curves of A Synchronous Motor and Regulation of Alternator With EMF and MMF Methed.Dokument10 SeitenExp. 4 - Determination of V Curves and Inverted V Curves of A Synchronous Motor and Regulation of Alternator With EMF and MMF Methed.AbhishEk Singh67% (3)
- Gate Firing Circuits For SCR'S R-C Triggering CircuitDokument3 SeitenGate Firing Circuits For SCR'S R-C Triggering CircuitB ANIL KUMARNoch keine Bewertungen
- 5.regultion of A Three Phase Alternator (MMF Method)Dokument7 Seiten5.regultion of A Three Phase Alternator (MMF Method)mandadi_saileshNoch keine Bewertungen
- PotentiometerDokument5 SeitenPotentiometerSARDAR PATEL100% (1)
- EEP305 Electric Drives Laboratory PDFDokument14 SeitenEEP305 Electric Drives Laboratory PDFAmit Singh100% (1)
- ED LAB ManualDokument31 SeitenED LAB Manualmanoj kumar100% (1)
- 2.back To Back Test On Two Similar TransformersDokument5 Seiten2.back To Back Test On Two Similar Transformersmandadi_sailesh50% (2)
- Speed Control of DC Shunt MotorDokument7 SeitenSpeed Control of DC Shunt MotorAakash0% (1)
- Experiment 1 (The Three Phase Alternator)Dokument11 SeitenExperiment 1 (The Three Phase Alternator)Onofre Algara Jr.100% (4)
- Lecture 03 - CycloconvertersDokument29 SeitenLecture 03 - CycloconvertersdaudiNoch keine Bewertungen
- Exp. 2 - OCC and Load Test On AlternatorDokument7 SeitenExp. 2 - OCC and Load Test On AlternatorKailash Jagarwal100% (1)
- EE6504 Electrical Machines-II (2 Mark Q & A) PDFDokument16 SeitenEE6504 Electrical Machines-II (2 Mark Q & A) PDFUnknownNoch keine Bewertungen
- 9.parallel Operation of Two Single Phase TransformersDokument4 Seiten9.parallel Operation of Two Single Phase Transformersmandadi_sailesh50% (2)
- Energy Audit Lab Manual Ex-705.........Dokument23 SeitenEnergy Audit Lab Manual Ex-705.........Nayandeep Gulhane100% (1)
- III Eee 05 Ee8501 Psa Unit 1Dokument37 SeitenIII Eee 05 Ee8501 Psa Unit 1BALAKRISHNANNoch keine Bewertungen
- Electrical Drive - LAB-ManualDokument31 SeitenElectrical Drive - LAB-Manualanil patelNoch keine Bewertungen
- FINAL IE Lab ManualDokument34 SeitenFINAL IE Lab ManualAnudeex ShettyNoch keine Bewertungen
- 6 Single Phase AC Voltage Controller With R and RL LoadsDokument6 Seiten6 Single Phase AC Voltage Controller With R and RL LoadsSeminars BRECWNoch keine Bewertungen
- Power Electronics Lab ManualDokument47 SeitenPower Electronics Lab Manualshaan_patil100% (1)
- 17-Ee6611 Power Electronics LabDokument79 Seiten17-Ee6611 Power Electronics Labvign3840Noch keine Bewertungen
- Government Polytechnic Muzaffarpur: Name of The Lab: Power Electronics & DrivesDokument18 SeitenGovernment Polytechnic Muzaffarpur: Name of The Lab: Power Electronics & DrivesVK DNoch keine Bewertungen
- Government Polytechnic Muzaffarpur: Name of The Lab: Power Electronics & DrivesDokument18 SeitenGovernment Polytechnic Muzaffarpur: Name of The Lab: Power Electronics & Drivesshashi kumarNoch keine Bewertungen
- Relays Re7tp13buDokument10 SeitenRelays Re7tp13buraulraul82Noch keine Bewertungen
- Assignment PDFDokument2 SeitenAssignment PDFTAPAS KUMAR MAJINoch keine Bewertungen
- Fuel Level IndicatorDokument3 SeitenFuel Level Indicatorவிஜய் பாலாஜி0% (1)
- Baldor 19H Series ManualDokument105 SeitenBaldor 19H Series ManualLuis MorenoNoch keine Bewertungen
- DS - 20211104 - SG6250HV-MV Datasheet - V2.0 - ENDokument2 SeitenDS - 20211104 - SG6250HV-MV Datasheet - V2.0 - ENJesica SantibañezNoch keine Bewertungen
- KBCC-240D: Chassis Mount Penta-DriveDokument2 SeitenKBCC-240D: Chassis Mount Penta-DriveArkhamNoch keine Bewertungen
- DATASHEET XS630B1MBL2-TelemecaniqueDokument2 SeitenDATASHEET XS630B1MBL2-TelemecaniqueRenato Antonio Zenteno TapiaNoch keine Bewertungen
- WPT 1Dokument37 SeitenWPT 1al_1989Noch keine Bewertungen
- Training SYS FlexibleTransmissionGrids Part1 LMC Final 27 04 2010Dokument67 SeitenTraining SYS FlexibleTransmissionGrids Part1 LMC Final 27 04 2010Arun dasNoch keine Bewertungen
- (CIGRE Green Books) Hiroki Ito - Switching Equipment (2019, Springer International Publishing)Dokument620 Seiten(CIGRE Green Books) Hiroki Ito - Switching Equipment (2019, Springer International Publishing)Fernanda Nistahuz Marca75% (8)
- Dynaselect System: Plug-N-Perf OptimizedDokument6 SeitenDynaselect System: Plug-N-Perf Optimizedpanigale1199100% (1)
- Abstract 1Dokument14 SeitenAbstract 1Shivam VermaNoch keine Bewertungen
- 499 Topics For Seminars Electrical and Electronics EngineeringDokument13 Seiten499 Topics For Seminars Electrical and Electronics Engineeringgeca3916Noch keine Bewertungen
- Power Distribution at NFC EeeDokument70 SeitenPower Distribution at NFC EeeTeEbhan ChAnthira SeEkaranNoch keine Bewertungen
- Havells Capacitor PricelistDokument20 SeitenHavells Capacitor PricelistKuntalGogoi100% (2)
- RFID Explained PDFDokument94 SeitenRFID Explained PDFJeff_de_MarseilleNoch keine Bewertungen
- 6SL3210-5BE25-5UV0 Datasheet en PDFDokument2 Seiten6SL3210-5BE25-5UV0 Datasheet en PDFirfanexpertNoch keine Bewertungen
- 5 Carbon Brush Technical Guide MersenDokument40 Seiten5 Carbon Brush Technical Guide Mersenpiojezior100% (1)
- SG20KTL Data SheetDokument2 SeitenSG20KTL Data SheetPaulo Cesar M CostaNoch keine Bewertungen
- National TimerDokument193 SeitenNational TimerdmugalloyNoch keine Bewertungen
- ComPact NS - 33478Dokument3 SeitenComPact NS - 33478dwi putikNoch keine Bewertungen
- Downloaded File-187 PDFDokument6 SeitenDownloaded File-187 PDFEBENoch keine Bewertungen
- WS Ac PDFDokument8 SeitenWS Ac PDFSriHarsha PoolaNoch keine Bewertungen
- Institute of Engineering & Management Mid Semester Examination - Even Semester 2021Dokument2 SeitenInstitute of Engineering & Management Mid Semester Examination - Even Semester 2021Workaholic KidNoch keine Bewertungen
- CPC 100 User Manual ENUDokument77 SeitenCPC 100 User Manual ENUJose Ramirez TorresNoch keine Bewertungen
- Alternating Current: Theory and Exercise BookletDokument31 SeitenAlternating Current: Theory and Exercise BookletMD CHHIMPANoch keine Bewertungen
- Data of CB-145 KVDokument16 SeitenData of CB-145 KVAn Trường Vũ Đăng100% (1)
- LTH Iea 1060 PDFDokument144 SeitenLTH Iea 1060 PDFAli HadiNoch keine Bewertungen
- LT-Z26SX5 - Z32SX5 CH - FL2 (sm-YA327)Dokument192 SeitenLT-Z26SX5 - Z32SX5 CH - FL2 (sm-YA327)Roberd MihailovNoch keine Bewertungen
- 132KV Siemens Breaker DrawingDokument13 Seiten132KV Siemens Breaker DrawingAnil100% (1)
- Power of Habit: The Ultimate Guide to Forming Positive Daily Habits, Learn How to Effectively Break Your Bad Habits For Good and Start Creating Good OnesVon EverandPower of Habit: The Ultimate Guide to Forming Positive Daily Habits, Learn How to Effectively Break Your Bad Habits For Good and Start Creating Good OnesBewertung: 4.5 von 5 Sternen4.5/5 (21)
- Well Integrity for Workovers and RecompletionsVon EverandWell Integrity for Workovers and RecompletionsBewertung: 5 von 5 Sternen5/5 (3)
- The Complete HVAC BIBLE for Beginners: The Most Practical & Updated Guide to Heating, Ventilation, and Air Conditioning Systems | Installation, Troubleshooting and Repair | Residential & CommercialVon EverandThe Complete HVAC BIBLE for Beginners: The Most Practical & Updated Guide to Heating, Ventilation, and Air Conditioning Systems | Installation, Troubleshooting and Repair | Residential & CommercialNoch keine Bewertungen
- Fire on the Horizon: The Untold Story of the Gulf Oil DisasterVon EverandFire on the Horizon: The Untold Story of the Gulf Oil DisasterNoch keine Bewertungen
- Electric Motor Control: DC, AC, and BLDC MotorsVon EverandElectric Motor Control: DC, AC, and BLDC MotorsBewertung: 4.5 von 5 Sternen4.5/5 (19)
- Well Control for Completions and InterventionsVon EverandWell Control for Completions and InterventionsBewertung: 4 von 5 Sternen4/5 (10)
- Renewable Energy: Physics, Engineering, Environmental Impacts, Economics and PlanningVon EverandRenewable Energy: Physics, Engineering, Environmental Impacts, Economics and PlanningBewertung: 5 von 5 Sternen5/5 (4)
- The Journeyman Electrician Exam Study Guide: Proven Methods for Successfully Passing the Journeyman Electrician Exam with ConfidenceVon EverandThe Journeyman Electrician Exam Study Guide: Proven Methods for Successfully Passing the Journeyman Electrician Exam with ConfidenceNoch keine Bewertungen
- Flow Analysis for Hydrocarbon Pipeline EngineeringVon EverandFlow Analysis for Hydrocarbon Pipeline EngineeringNoch keine Bewertungen
- Shorting the Grid: The Hidden Fragility of Our Electric GridVon EverandShorting the Grid: The Hidden Fragility of Our Electric GridBewertung: 4.5 von 5 Sternen4.5/5 (2)
- Air Cooled Heat Exchanger Handbook: Fundamentals, Calculations, Design and Q&AVon EverandAir Cooled Heat Exchanger Handbook: Fundamentals, Calculations, Design and Q&ANoch keine Bewertungen
- Building Energy Management Systems and Techniques: Principles, Methods, and ModellingVon EverandBuilding Energy Management Systems and Techniques: Principles, Methods, and ModellingNoch keine Bewertungen
- Electric Motors and Drives: Fundamentals, Types and ApplicationsVon EverandElectric Motors and Drives: Fundamentals, Types and ApplicationsBewertung: 4.5 von 5 Sternen4.5/5 (12)
- Solar Energy: Survive Easily on Solar Power Off the GridVon EverandSolar Energy: Survive Easily on Solar Power Off the GridNoch keine Bewertungen
- Introduction to Power System ProtectionVon EverandIntroduction to Power System ProtectionBewertung: 5 von 5 Sternen5/5 (1)
- Global Landscape of Renewable Energy FinanceVon EverandGlobal Landscape of Renewable Energy FinanceNoch keine Bewertungen
- Handbook on Battery Energy Storage SystemVon EverandHandbook on Battery Energy Storage SystemBewertung: 4.5 von 5 Sternen4.5/5 (2)
- Asset Integrity Management for Offshore and Onshore StructuresVon EverandAsset Integrity Management for Offshore and Onshore StructuresNoch keine Bewertungen
- Thermal Power Plant: Design and OperationVon EverandThermal Power Plant: Design and OperationBewertung: 4.5 von 5 Sternen4.5/5 (23)
- Renewable Energy Finance: Theory and PracticeVon EverandRenewable Energy Finance: Theory and PracticeBewertung: 4 von 5 Sternen4/5 (1)
- Idaho Falls: The Untold Story of America's First Nuclear AccidentVon EverandIdaho Falls: The Untold Story of America's First Nuclear AccidentBewertung: 4.5 von 5 Sternen4.5/5 (21)
- Power Electronics Diploma Interview Q&A: Career GuideVon EverandPower Electronics Diploma Interview Q&A: Career GuideNoch keine Bewertungen
- VSC-FACTS-HVDC: Analysis, Modelling and Simulation in Power GridsVon EverandVSC-FACTS-HVDC: Analysis, Modelling and Simulation in Power GridsNoch keine Bewertungen