Das könnte Ihnen auch gefallen
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- 2012 Toyota Prius C WMGDokument58 Seiten2012 Toyota Prius C WMGbuddhikasatNoch keine Bewertungen
- Welding ProcessesDokument51 SeitenWelding ProcessesAtul100% (4)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- M3013-E Micropack 15 User ManuelDokument54 SeitenM3013-E Micropack 15 User ManuelhaizammNoch keine Bewertungen
- CIFA Concrete PumpDokument12 SeitenCIFA Concrete PumpVipulNoch keine Bewertungen
- Info Iec60092-376 (Ed3.0) enDokument7 SeitenInfo Iec60092-376 (Ed3.0) endanilonavNoch keine Bewertungen
- Exam Style Answers 11 Asal Physics CBDokument2 SeitenExam Style Answers 11 Asal Physics CBAnshul ShahNoch keine Bewertungen
- Development of Rice Husk Briquettes For Use As FuelDokument4 SeitenDevelopment of Rice Husk Briquettes For Use As FuelghlbudinNoch keine Bewertungen
- 25 Watt Power AmplifierDokument5 Seiten25 Watt Power AmplifierLemuel C. FernandezNoch keine Bewertungen
- MD DataDokument140 SeitenMD DataKailash PandhareNoch keine Bewertungen
- Weymouth and Panhandle Equations For Gas PipelinesDokument4 SeitenWeymouth and Panhandle Equations For Gas PipelinessgrsthNoch keine Bewertungen
- Flow of A Film On The Outside of A Circular TubeDokument6 SeitenFlow of A Film On The Outside of A Circular TubeShubh100% (6)
- Dich Thiep MoiDokument1 SeiteDich Thiep Moivuhoanganh110Noch keine Bewertungen
- E Series Command Reference ManualDokument66 SeitenE Series Command Reference Manualvuhoanganh110Noch keine Bewertungen
- BiiProgrammingGuide AneuDokument82 SeitenBiiProgrammingGuide Aneuvuhoanganh110Noch keine Bewertungen
- Bi-iV301 Datasheet PrintDokument2 SeitenBi-iV301 Datasheet Printvuhoanganh110Noch keine Bewertungen
- D48 E Series User ManualDokument68 SeitenD48 E Series User Manualvuhoanganh110Noch keine Bewertungen
- Design of A FPGA Controller For Full Bridge PhaseDokument6 SeitenDesign of A FPGA Controller For Full Bridge Phasevuhoanganh110Noch keine Bewertungen
- Paper No: 2002 OMAE - Volume 111, Materials EngineeringDokument6 SeitenPaper No: 2002 OMAE - Volume 111, Materials EngineeringAnonymous 9PIxHy13Noch keine Bewertungen
- Part 7 RCM Pump Reliability 33Dokument33 SeitenPart 7 RCM Pump Reliability 33Aenur RofiiqNoch keine Bewertungen
- Airwide International-China (A) Key Account SellingDokument6 SeitenAirwide International-China (A) Key Account SellingFahad ParvezNoch keine Bewertungen
- Diaphragm PumpsDokument1 SeiteDiaphragm PumpsBobby Jacob [Lead Manager, Minimac]Noch keine Bewertungen
- Tüvis: TÜVIS-Prüfgrundlagen: AD 2000 Code, Volume 1, Register A Replaces Page - VersionDokument2 SeitenTüvis: TÜVIS-Prüfgrundlagen: AD 2000 Code, Volume 1, Register A Replaces Page - VersionGentelmanOnlyNoch keine Bewertungen
- FICCI India Office Repurposed To Scaleup ReportDokument17 SeitenFICCI India Office Repurposed To Scaleup ReportRitesh KurarNoch keine Bewertungen
- Mechanics - EssayDokument5 SeitenMechanics - EssayVic de BloisNoch keine Bewertungen
- Use and Maintenance Instructions - Ql0208-Rev.2-2017 - enDokument70 SeitenUse and Maintenance Instructions - Ql0208-Rev.2-2017 - enmauriciojjNoch keine Bewertungen
- GE MARC Projector Lamp Bulletin 1978Dokument2 SeitenGE MARC Projector Lamp Bulletin 1978Alan MastersNoch keine Bewertungen
- Rotary Pump Family TreeDokument3 SeitenRotary Pump Family TreeChevronelleNoch keine Bewertungen
- LowvoltageACdrivesforwaterandwastewater REVD enDokument28 SeitenLowvoltageACdrivesforwaterandwastewater REVD enBalu MNoch keine Bewertungen
- Waste Management Study of FoundriesDokument64 SeitenWaste Management Study of FoundriesSumit GusainNoch keine Bewertungen
- Optimization Studies in Sulfuric Acid Production: 1. AbstractDokument6 SeitenOptimization Studies in Sulfuric Acid Production: 1. Abstractdiegotorete1994Noch keine Bewertungen
- ES 653: Basic Thermodynamics ES 653: Basic ThermodynamicsDokument19 SeitenES 653: Basic Thermodynamics ES 653: Basic ThermodynamicsGrant Irving Gorre TomaubNoch keine Bewertungen
- 7PG23 5B3 Complete Technical ManualDokument36 Seiten7PG23 5B3 Complete Technical ManualDan StreetNoch keine Bewertungen
- 6th Sem Institution Electives_2023-24Dokument3 Seiten6th Sem Institution Electives_2023-24bhuvankumar3877Noch keine Bewertungen
- Flying Injection ManualDokument40 SeitenFlying Injection ManualSlainsha100% (1)
- 1.35046!CHRISGAS - Final Publishable Results - Web - November 2010Dokument33 Seiten1.35046!CHRISGAS - Final Publishable Results - Web - November 2010RicardoEscaladaCuadrado1301Noch keine Bewertungen
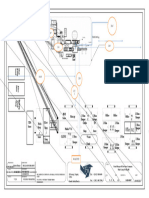
- Lay Out NewDokument1 SeiteLay Out Newmohnadjib03 mohnadjibNoch keine Bewertungen