Das könnte Ihnen auch gefallen
- SEM 9 Metodo MatricialDokument40 SeitenSEM 9 Metodo MatricialStefan MeddleNoch keine Bewertungen
- 3 Rigidez Armadura PlanaDokument81 Seiten3 Rigidez Armadura PlanaCamilo RusinqueNoch keine Bewertungen
- N° 7 Vigas Metodo Pendiente-DeflexiónDokument37 SeitenN° 7 Vigas Metodo Pendiente-DeflexiónGabriel VillaNoch keine Bewertungen
- Determinacion EstructurasDokument36 SeitenDeterminacion EstructurasYanella Smith Arevalo GonzalesNoch keine Bewertungen
- Ejercicio de TEOREMAS de CASTIGLIANO Hiperestatico 1Dokument4 SeitenEjercicio de TEOREMAS de CASTIGLIANO Hiperestatico 1Santiago MirandaNoch keine Bewertungen
- Diapositivas Cantidad de Movimiento AngularDokument22 SeitenDiapositivas Cantidad de Movimiento AngularJ'sus Escalant RamirezNoch keine Bewertungen
- Vigas Doblemente Reforzadas-GRUPO 2Dokument11 SeitenVigas Doblemente Reforzadas-GRUPO 2Malú Chaquila SaavedraNoch keine Bewertungen
- Lineas-De-Influencia FFFFDokument42 SeitenLineas-De-Influencia FFFFCarlos Maldonado LopezNoch keine Bewertungen
- Ej A 1Dokument12 SeitenEj A 1Pablo Delgadillo100% (1)
- Criterios de Estructuración Sismo Resistente en EdificiosDokument107 SeitenCriterios de Estructuración Sismo Resistente en EdificiosJLuiss UPaadillaa100% (1)
- Cap 4 - 5Dokument71 SeitenCap 4 - 5WALDIR AVILA CASTILLONoch keine Bewertungen
- 2.0 Metodos de EnergiaDokument46 Seiten2.0 Metodos de EnergiaLuz Marina Otálora BautistaNoch keine Bewertungen
- Capítulo 1 Introducción Al Acero EstructuralDokument13 SeitenCapítulo 1 Introducción Al Acero EstructuralRicardo C.CNoch keine Bewertungen
- Simica Chopra Resueltos 1.2Dokument13 SeitenSimica Chopra Resueltos 1.2Emmanuel Pincheira MartinezNoch keine Bewertungen
- 4ta PRACTICA ANALISIS I CABLES 2020Dokument1 Seite4ta PRACTICA ANALISIS I CABLES 2020Erwin Salcedo AlcaNoch keine Bewertungen
- Cap 3Dokument48 SeitenCap 3Ricardo CorreaNoch keine Bewertungen
- Ejercicio de Metrado de Muros y Columnas.2020-2Dokument10 SeitenEjercicio de Metrado de Muros y Columnas.2020-2Alex Ivan Riva MejiaNoch keine Bewertungen
- 8 1 Losas Portico EquivalenteDokument40 Seiten8 1 Losas Portico EquivalenteAngel7xNoch keine Bewertungen
- Trabajo Resumido de Lineas de InfluenciaDokument3 SeitenTrabajo Resumido de Lineas de InfluenciaMonica Taipe UrribarriNoch keine Bewertungen
- Matriz de Rigidez Considerando Deformacion Axial y Corte 2019Dokument14 SeitenMatriz de Rigidez Considerando Deformacion Axial y Corte 2019JuanseRenteriaNoch keine Bewertungen
- Predimensionamiento de LosasDokument31 SeitenPredimensionamiento de LosasVictor RojasNoch keine Bewertungen
- Predimendionamiento y Metrados de Losa y VigaDokument39 SeitenPredimendionamiento y Metrados de Losa y VigaGeorgeLmbNoch keine Bewertungen
- Resistencia de Materiales I PDFDokument16 SeitenResistencia de Materiales I PDFJonas Qquenta Soto100% (2)
- Semana 04 S1 Mrigidez 2323Dokument111 SeitenSemana 04 S1 Mrigidez 2323MarcoVillónVerásteguiNoch keine Bewertungen
- Analisis y Diseño de Vigas TDokument37 SeitenAnalisis y Diseño de Vigas TMiller De La CruzNoch keine Bewertungen
- 2daesp DinamicaEstructural-1GDLDokument43 Seiten2daesp DinamicaEstructural-1GDLjblingenieroNoch keine Bewertungen
- 11 Metodo de CasteglianiDokument9 Seiten11 Metodo de CasteglianimilagrosNoch keine Bewertungen
- 03 Metodo de La RigidezDokument9 Seiten03 Metodo de La RigidezAntoniCMontNoch keine Bewertungen
- Analisis Estructural Por Cargas Laterales (Sismo Moderado)Dokument56 SeitenAnalisis Estructural Por Cargas Laterales (Sismo Moderado)Guillermo Sanchez del AguilaNoch keine Bewertungen
- Matriz de Rigidez Lateral y Apoyos ElasticosDokument18 SeitenMatriz de Rigidez Lateral y Apoyos ElasticosTatiana Peña MendozaNoch keine Bewertungen
- Sistematización Método de RigidezDokument10 SeitenSistematización Método de RigidezJesif Salirrosas CuevaNoch keine Bewertungen
- First Work AE IDokument2 SeitenFirst Work AE IJose Luis Mas SandovalNoch keine Bewertungen
- Unidad III Metodo de La Carga Virtual UnitariaDokument12 SeitenUnidad III Metodo de La Carga Virtual UnitariaSeveriano Alvarez Cruz100% (2)
- Datos Técnicos Del Puente ChilinaDokument7 SeitenDatos Técnicos Del Puente ChilinaEd Cuyo AlvarezNoch keine Bewertungen
- Ejercicio 05 Metodo Hardy Cross Resit Mat IIDokument11 SeitenEjercicio 05 Metodo Hardy Cross Resit Mat IIHF RafoNoch keine Bewertungen
- Cinética Traslación Rectilínea DeberDokument2 SeitenCinética Traslación Rectilínea DeberGalo MotocheNoch keine Bewertungen
- Fuerza EspecificaDokument165 SeitenFuerza Especificaadrian100% (3)
- 18 - Canales de TierraDokument23 Seiten18 - Canales de TierradavidNoch keine Bewertungen
- Sesión 12 FLUIDOS - Redes Abiertas y Redes CerradasDokument16 SeitenSesión 12 FLUIDOS - Redes Abiertas y Redes CerradasAlexander vergara ramosNoch keine Bewertungen
- Libro de Mecanica de FluidosDokument138 SeitenLibro de Mecanica de FluidosDavid Galeno Alvarado GuevaraNoch keine Bewertungen
- Marco Teórico Del Método de CrossDokument2 SeitenMarco Teórico Del Método de CrossSalut Je Suis Rodrigo100% (1)
- 07 Sustentacion y ArrastreDokument23 Seiten07 Sustentacion y ArrastreVictor Enrique Cabezas FigueroaNoch keine Bewertungen
- Envolvente Viga ContinuaDokument8 SeitenEnvolvente Viga ContinuaALBERT ANTHONY ZARATE UMERESNoch keine Bewertungen
- Tabla SemigraficaDokument5 SeitenTabla SemigraficaCarolina DiazNoch keine Bewertungen
- Grado de HiperestaticidadDokument9 SeitenGrado de HiperestaticidadCris San Martin100% (3)
- Armaduras en 3d TeoríaDokument7 SeitenArmaduras en 3d TeoríaKarol Sotomayor Gonzales100% (1)
- Pendiente - Deflexion MejorDokument37 SeitenPendiente - Deflexion MejorJhonFranklinTorresAbantoNoch keine Bewertungen
- ARMADURASDokument34 SeitenARMADURASEdison Enrique Hidalgo SilvaNoch keine Bewertungen
- TARABAJODETUBERIASPp 6 PDFDokument3 SeitenTARABAJODETUBERIASPp 6 PDFWilfredo RafaelNoch keine Bewertungen
- Grupo 3 Cuantificación de CargasDokument22 SeitenGrupo 3 Cuantificación de CargasSilviaRamirezNoch keine Bewertungen
- Grados de Indeterminación USMPDokument4 SeitenGrados de Indeterminación USMPBrayand Jhunior Nihua CalvoNoch keine Bewertungen
- Coeficiente de BalastoDokument11 SeitenCoeficiente de BalastoJessica DuchiNoch keine Bewertungen
- 3-Clasificación y Nomenclatura de Las Curvas de RemansoDokument9 Seiten3-Clasificación y Nomenclatura de Las Curvas de RemansoAquino Varillas AcuñaNoch keine Bewertungen
- Metodo de Rigidez Analisis EstructuralDokument7 SeitenMetodo de Rigidez Analisis EstructuralHenrich MohrNoch keine Bewertungen
- Metodos Energeticos Vigas y PorticosDokument52 SeitenMetodos Energeticos Vigas y PorticosEnrique Gomez DiazNoch keine Bewertungen
- Metodos Kani Taka y Otros PDFDokument44 SeitenMetodos Kani Taka y Otros PDFYessenia ElisaNoch keine Bewertungen
- Parte 1-Análisis Matricial (A) - MarcosDokument12 SeitenParte 1-Análisis Matricial (A) - MarcosmarquivdNoch keine Bewertungen
- McGuire Gallagher Ziemian - Matrix Structural Analysis - Removed - Removed - En.esDokument47 SeitenMcGuire Gallagher Ziemian - Matrix Structural Analysis - Removed - Removed - En.esDiego David100% (1)
- Patologías Puentes Vehiculares Concreto ChapineroDokument83 SeitenPatologías Puentes Vehiculares Concreto Chapineroelmer alonsoNoch keine Bewertungen
- Patologías Puentes Vehiculares Concreto ChapineroDokument83 SeitenPatologías Puentes Vehiculares Concreto Chapineroelmer alonsoNoch keine Bewertungen
- Acta de Entrega, Constancia de No Adeudo, CuestionarioDokument4 SeitenActa de Entrega, Constancia de No Adeudo, CuestionarioLUISNoch keine Bewertungen
- CÓDIGO MP-211-PR01-P01-F01 REV. 0 Página 1 deDokument10 SeitenCÓDIGO MP-211-PR01-P01-F01 REV. 0 Página 1 deLUISNoch keine Bewertungen
- SIII Cambio Climatico Una Perspectiva de RiesgoDokument71 SeitenSIII Cambio Climatico Una Perspectiva de RiesgoLUISNoch keine Bewertungen
- Informe de Grado.Dokument71 SeitenInforme de Grado.yonatan vergara hernandezNoch keine Bewertungen
- Tanque de Descargas de Fondo para HuertosDokument206 SeitenTanque de Descargas de Fondo para HuertosLUISNoch keine Bewertungen
- Puentes EmpujadosDokument20 SeitenPuentes EmpujadosLUISNoch keine Bewertungen
- 43 Redes de DistribucionDokument250 Seiten43 Redes de DistribucionEmmanuel MendozaNoch keine Bewertungen
- Presentacion Novena Conferencia Alfonso Rico Enero2018Dokument142 SeitenPresentacion Novena Conferencia Alfonso Rico Enero2018LUISNoch keine Bewertungen
- Puente ChiapasDokument2 SeitenPuente ChiapasLUISNoch keine Bewertungen
- Teorìa de Decisiones PDFDokument7 SeitenTeorìa de Decisiones PDFdarinelNoch keine Bewertungen
- Cimbras para Concreto2Dokument12 SeitenCimbras para Concreto2LUISNoch keine Bewertungen
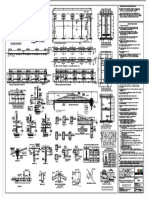
- Plano EstructuralDokument1 SeitePlano EstructuralLUISNoch keine Bewertungen
- Analisis Matricial (B) - VigasDokument5 SeitenAnalisis Matricial (B) - VigasLUISNoch keine Bewertungen
- Analisis Matricial (B) - VigasDokument5 SeitenAnalisis Matricial (B) - VigasLUISNoch keine Bewertungen
- Estaciones CostaDokument24 SeitenEstaciones CostaLUISNoch keine Bewertungen
- Areas de Momentos WiliamDokument22 SeitenAreas de Momentos WiliamLUISNoch keine Bewertungen
- Calcular El Giro enDokument1 SeiteCalcular El Giro enLUISNoch keine Bewertungen
- 1.1.ingeniería EstructuralDokument2 Seiten1.1.ingeniería EstructuralLUISNoch keine Bewertungen
- Formato de Tareas y Series Teoria de Decisiones 7-dDokument4 SeitenFormato de Tareas y Series Teoria de Decisiones 7-dLUISNoch keine Bewertungen
- 1.2 Elementos EstructuralesDokument1 Seite1.2 Elementos EstructuralesLUISNoch keine Bewertungen
- 2.3. - Metodo Viga ConjugadaDokument4 Seiten2.3. - Metodo Viga ConjugadaLUISNoch keine Bewertungen
- Apuntes Teoría de Decisión 2013Dokument118 SeitenApuntes Teoría de Decisión 2013Manu MontesinosNoch keine Bewertungen
- Hidrologia - EscurrimientoDokument78 SeitenHidrologia - EscurrimientoKristofer Candia LupoNoch keine Bewertungen
- Serie Infiltracion PDFDokument1 SeiteSerie Infiltracion PDFAudelino CastellanosNoch keine Bewertungen
- Modelación LLuvia EscurrimientoDokument45 SeitenModelación LLuvia EscurrimientoLUISNoch keine Bewertungen
- Cap.7 Infiltracion - 2 PDFDokument16 SeitenCap.7 Infiltracion - 2 PDFLUISNoch keine Bewertungen
- GuiaT L2Dokument10 SeitenGuiaT L2José MenesesNoch keine Bewertungen
- EJERCICIOS RESUELTOS FisicaDokument6 SeitenEJERCICIOS RESUELTOS Fisicamrheal1234550% (2)
- La Derivada Direccional de F enDokument12 SeitenLa Derivada Direccional de F enroberto_ovandoNoch keine Bewertungen
- Calculo 02 - Geometria Analitica Del Espacio (Vertical) PDFDokument29 SeitenCalculo 02 - Geometria Analitica Del Espacio (Vertical) PDFluisNoch keine Bewertungen
- Clase 14.1Dokument30 SeitenClase 14.1ixcj18 •Noch keine Bewertungen
- Ieu - Matematicas Avanzadas - 01Dokument22 SeitenIeu - Matematicas Avanzadas - 01Zuleima AlGopNoch keine Bewertungen
- Conceptos Fundamentales VectoresDokument15 SeitenConceptos Fundamentales Vectoreswilson herrera100% (1)
- Rotación y DeformaciónDokument2 SeitenRotación y DeformaciónArumi MarNoch keine Bewertungen
- Trabajo de Vectores - José Miguel Fasabi TapullimaDokument15 SeitenTrabajo de Vectores - José Miguel Fasabi TapullimaJosé MiguelNoch keine Bewertungen
- SI-162 - Algebra LinealDokument6 SeitenSI-162 - Algebra Linealvictor hugo salazar ninaNoch keine Bewertungen
- Hoja de TrabajoDokument6 SeitenHoja de TrabajoJoseph Avila AlvarezNoch keine Bewertungen
- Matemática 4to Tema 4 (Vectores R2)Dokument9 SeitenMatemática 4to Tema 4 (Vectores R2)Victor CastilloNoch keine Bewertungen
- MatricesDokument10 SeitenMatricesDixon Lopez VeraNoch keine Bewertungen
- Practica 03 MAT103 I-2019Dokument4 SeitenPractica 03 MAT103 I-2019palito rijoNoch keine Bewertungen
- Magistral 3 PDFDokument23 SeitenMagistral 3 PDFJuan Pablo Cardenas GarzonNoch keine Bewertungen
- Espacios VectorialesDokument9 SeitenEspacios VectorialesDemorielNoch keine Bewertungen
- Polinomio CaracterísticoDokument3 SeitenPolinomio CaracterísticoJorge Santibañez GalánNoch keine Bewertungen
- Lab#2-D-EloyGarciaVeliz 2334Dokument11 SeitenLab#2-D-EloyGarciaVeliz 2334ISRAEL MANFRED CONDORI ROCHANoch keine Bewertungen
- Solución Ejercicios 1, 2, 3 Y 4 Leonardo Palma Forero.Dokument24 SeitenSolución Ejercicios 1, 2, 3 Y 4 Leonardo Palma Forero.Leo Leo PalmaNoch keine Bewertungen
- MA263 2012 01 S06-03 Funciones Derivadas Direccionales y Vector GradienteDokument18 SeitenMA263 2012 01 S06-03 Funciones Derivadas Direccionales y Vector GradienteLuis HinostrozaNoch keine Bewertungen
- Ejercicio 1: Conceptualización de Espacios Vectoriales Base y Dimensión de Un Espacio VectorialDokument8 SeitenEjercicio 1: Conceptualización de Espacios Vectoriales Base y Dimensión de Un Espacio VectorialmariaNoch keine Bewertungen
- Trabajo Unidad 2 de JulioDokument20 SeitenTrabajo Unidad 2 de Julioalbeiro agudeloNoch keine Bewertungen
- Transformaciones Elementales Por ReglónDokument4 SeitenTransformaciones Elementales Por ReglónVictoriaNoch keine Bewertungen
- Capitulo 4 y 5 Lineal ApuntesDokument50 SeitenCapitulo 4 y 5 Lineal ApuntesL̶u̶i̶s̶ P̶i̶l̶c̶o̶Noch keine Bewertungen
- Syllabus Avanzado de Álgebra. v.2021Dokument5 SeitenSyllabus Avanzado de Álgebra. v.2021juanNoch keine Bewertungen
- Ejercicios UPNDokument6 SeitenEjercicios UPNBrenda Trujillo100% (1)
- Algebra Lineal Serie5Dokument2 SeitenAlgebra Lineal Serie5AxelNoch keine Bewertungen
- Texto Algebra Lineal PDFDokument325 SeitenTexto Algebra Lineal PDFDavid JaraNoch keine Bewertungen
- Vector EsDokument4 SeitenVector EsGermain Pastén TabiloNoch keine Bewertungen