Das könnte Ihnen auch gefallen
- 16 - Vectores ParalelosDokument3 Seiten16 - Vectores ParalelosMarcos Daniel Ruiz Diaz Mendoza0% (1)
- Tres en Raya Visual Basic 2014Dokument7 SeitenTres en Raya Visual Basic 2014Marisol LópezNoch keine Bewertungen
- Linux y CDokument17 SeitenLinux y CJohan PeraltaNoch keine Bewertungen
- RLeccion 1Dokument9 SeitenRLeccion 1Hugo RodriguezNoch keine Bewertungen
- 1443957Dokument16 Seiten1443957Samael MartinezNoch keine Bewertungen
- JAva Parte 2Dokument46 SeitenJAva Parte 2estevan diazNoch keine Bewertungen
- Fundamentos de ProgramaciónDokument68 SeitenFundamentos de ProgramaciónJuan Carlos ViteriNoch keine Bewertungen
- Sistema Masa ResorteDokument3 SeitenSistema Masa ResorteJuan Carlos MuñozNoch keine Bewertungen
- Cálculo Diferencial PDFDokument143 SeitenCálculo Diferencial PDFDanielGuzmánNoch keine Bewertungen
- Ejemplo para Leccion Programacion en C#Dokument1 SeiteEjemplo para Leccion Programacion en C#Luis BenavidesNoch keine Bewertungen
- Métodos para Resolver DeterminantesDokument5 SeitenMétodos para Resolver DeterminantesCrizz CRNoch keine Bewertungen
- Operaciones Elementales Fila PDFDokument8 SeitenOperaciones Elementales Fila PDFCarola QNoch keine Bewertungen
- Ficha 06 (2016) - Estructuras Repetitivas - Ciclo While (Python) PDFDokument21 SeitenFicha 06 (2016) - Estructuras Repetitivas - Ciclo While (Python) PDFDaniel PatiñoNoch keine Bewertungen
- PseudocodigoDokument2 SeitenPseudocodigojoel joanthanNoch keine Bewertungen
- Unidad III Pilas y ColasDokument21 SeitenUnidad III Pilas y ColasVictor Alfonso Lua LuaNoch keine Bewertungen
- Grupo 05 - Balotario de Preguntas Temas Servidores DNSDokument3 SeitenGrupo 05 - Balotario de Preguntas Temas Servidores DNSAlexis RoqueNoch keine Bewertungen
- Ejercicios Punteros Cadenas VectoresDokument6 SeitenEjercicios Punteros Cadenas VectoresTania RuanoNoch keine Bewertungen
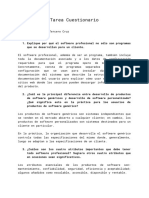
- Ejercicios 10 Preguntas Ingenieria de SoftwareDokument5 SeitenEjercicios 10 Preguntas Ingenieria de SoftwareByron TerceroNoch keine Bewertungen
- Control Estructurado de ExcepcionesDokument30 SeitenControl Estructurado de ExcepcionesMoises Armando Gonzalez TejadaNoch keine Bewertungen
- Clases ANONIMASDokument1 SeiteClases ANONIMASJesus Emanuel Rojano GallardoNoch keine Bewertungen
- 06 Fundamentos C# POO InterfacesDokument14 Seiten06 Fundamentos C# POO InterfacesGerson Polo NuñezNoch keine Bewertungen
- Control TabcontrolDokument3 SeitenControl TabcontrolAnDy AntonNoch keine Bewertungen
- Comandos RPM en LinuxDokument1 SeiteComandos RPM en LinuxViktor GomezNoch keine Bewertungen
- Servidor NFS Ubuntu ServerDokument12 SeitenServidor NFS Ubuntu ServerRodrigoGarcíaMirandaNoch keine Bewertungen
- Arquitectura y Funcionalidad de ADO NETDokument10 SeitenArquitectura y Funcionalidad de ADO NETPowerKarlNoch keine Bewertungen
- Practicas de Adobe AuditionDokument26 SeitenPracticas de Adobe AuditionJuan Carlos Salas RuizNoch keine Bewertungen
- Ejercicios ExcepcionesDokument6 SeitenEjercicios ExcepcionesAndres Leon0% (1)
- (Linux Loader) .: Características de LiloDokument3 Seiten(Linux Loader) .: Características de Lilojavisan2011Noch keine Bewertungen
- Métodos Set y Get ProgramaciónDokument16 SeitenMétodos Set y Get ProgramaciónPepe GrilloNoch keine Bewertungen
- Excepciones en Visual BasicDokument8 SeitenExcepciones en Visual BasicGhus TavNoch keine Bewertungen
- 30 Ejercicios en LINQDokument11 Seiten30 Ejercicios en LINQRony ReyesNoch keine Bewertungen
- Resumen Listas Arreglos y ColeccionesDokument7 SeitenResumen Listas Arreglos y ColeccionesCarlos Edwin Rodriguez CuevasNoch keine Bewertungen
- Estructura de Un Pseudocodigo (Repaso) PDFDokument8 SeitenEstructura de Un Pseudocodigo (Repaso) PDFDaniel CalderonNoch keine Bewertungen
- Guía de Aprendizaje Unidad3 C++Dokument3 SeitenGuía de Aprendizaje Unidad3 C++William Javier Rosero VargasNoch keine Bewertungen
- Paso Por Valor y Por Referencia PDFDokument2 SeitenPaso Por Valor y Por Referencia PDFjaci garciaNoch keine Bewertungen
- C# Vectores de ObjetosDokument5 SeitenC# Vectores de ObjetosVictor SnowNoch keine Bewertungen
- Ejercicios Arreglos BidimensionalesDokument4 SeitenEjercicios Arreglos BidimensionalesPablo E Miranda RguezNoch keine Bewertungen
- Ordenamiento Por El Metodo de SelecciónDokument9 SeitenOrdenamiento Por El Metodo de SelecciónWalter OrlandoNoch keine Bewertungen
- Definicion Formal Del TADDokument4 SeitenDefinicion Formal Del TADAngel EduardoNoch keine Bewertungen
- Taller 4. Algoritmos Arreglos JavaDokument2 SeitenTaller 4. Algoritmos Arreglos JavaNelson AndresNoch keine Bewertungen
- Herramienta de Logica ComputacionalDokument3 SeitenHerramienta de Logica ComputacionalOscar Salgado GomezNoch keine Bewertungen
- Ejemplo de Clases en POO - C#Dokument5 SeitenEjemplo de Clases en POO - C#edwtrimoNoch keine Bewertungen
- Cuadro Comparativo Actividad 2 Tipos de Servidores WebDokument4 SeitenCuadro Comparativo Actividad 2 Tipos de Servidores WebbetyNoch keine Bewertungen
- 4.2.1 Ejercicios de Est - Selectivas ResueltosDokument12 Seiten4.2.1 Ejercicios de Est - Selectivas ResueltosPulcro345Noch keine Bewertungen
- Merge SortDokument3 SeitenMerge SortNalia RS0% (1)
- Uso de ActionListener para Añadir Acciones A Un Jbutton en JavaDokument2 SeitenUso de ActionListener para Añadir Acciones A Un Jbutton en JavaluisebelisarioNoch keine Bewertungen
- AlgoritmosDokument35 SeitenAlgoritmosdumogo100% (2)
- Matrices EquivalentesDokument5 SeitenMatrices EquivalentesLorena Jiménez SandovalNoch keine Bewertungen
- Laboratorio 1 Sistemas de Informacion 2Dokument19 SeitenLaboratorio 1 Sistemas de Informacion 2Abel GutierrezNoch keine Bewertungen
- PSe IntDokument27 SeitenPSe Intteresa cuevas bedfordNoch keine Bewertungen
- Algoritmo de SutherlandDokument7 SeitenAlgoritmo de SutherlandPercyArmasNoch keine Bewertungen
- Guia de Practica 3 - Script-Shell PDFDokument14 SeitenGuia de Practica 3 - Script-Shell PDFCarlos Geovanny Escobar PortilloNoch keine Bewertungen
- Ejercicios 1Dokument0 SeitenEjercicios 1Luis Amaro Villanueva TapiaNoch keine Bewertungen
- Ejercicio Con VectoresDokument7 SeitenEjercicio Con VectoresEdilberto Rogers Ramos ApazaNoch keine Bewertungen
- Matrices y Determinantes 2 PDFDokument16 SeitenMatrices y Determinantes 2 PDFyoselin encarnacionNoch keine Bewertungen
- Clase4 MN P56Dokument14 SeitenClase4 MN P56Alex BladimirNoch keine Bewertungen
- El Calculo Superior en El Entorno MatlabDokument50 SeitenEl Calculo Superior en El Entorno MatlabAlberto LandaNoch keine Bewertungen
- Funcion DeterminanteDokument6 SeitenFuncion DeterminanteAlberto NoesiNoch keine Bewertungen
- TRIGONOMETRIADokument14 SeitenTRIGONOMETRIAarnulfoNoch keine Bewertungen
- Pre MatematicaDokument18 SeitenPre MatematicaGarcia Karol100% (1)
- Distribución BivarianteDokument11 SeitenDistribución Bivarianteramirex7100% (1)
- 10 Registro Asistencia Estudiantes CALC IDokument1 Seite10 Registro Asistencia Estudiantes CALC Iramirex7Noch keine Bewertungen
- Plan Cuentas OrionDokument5 SeitenPlan Cuentas Orionramirex7Noch keine Bewertungen
- Cap1 Vectores en El PlanoDokument22 SeitenCap1 Vectores en El Planoramirex7Noch keine Bewertungen
- Crear CuentaDokument3 SeitenCrear Cuentaramirex7Noch keine Bewertungen
- DerifisicaDokument3 SeitenDerifisicaramirex7Noch keine Bewertungen
- PRÁCTICAfis 1 2 - 2018 PDFDokument1 SeitePRÁCTICAfis 1 2 - 2018 PDFramirex7Noch keine Bewertungen
- Muest RabiDokument5 SeitenMuest Rabiramirex7Noch keine Bewertungen
- Cap1 Vectores en El PlanoDokument23 SeitenCap1 Vectores en El Planoramirex7Noch keine Bewertungen
- PRÁCTICAfis 1Dokument2 SeitenPRÁCTICAfis 1ramirex7Noch keine Bewertungen
- Tema1 PDFDokument14 SeitenTema1 PDFramirex7Noch keine Bewertungen
- PRÁCTICAfis 2Dokument2 SeitenPRÁCTICAfis 2ramirex70% (1)
- Qué Es El Número AtómicoDokument4 SeitenQué Es El Número AtómicoYohana CPNoch keine Bewertungen
- Coordinación de Protecciones de Generadores y Celdas Ferrenergy 5011-00-EL-RP-002Dokument17 SeitenCoordinación de Protecciones de Generadores y Celdas Ferrenergy 5011-00-EL-RP-002calecale100% (1)
- Tema II Primera Ley de La Termodinamica Proyecto IIDokument35 SeitenTema II Primera Ley de La Termodinamica Proyecto IIMerelyn Del PiiLar RaMiirez RoManNoch keine Bewertungen
- Identidades Trigonométricas - Wikipedia, La Enciclopedia LibreDokument8 SeitenIdentidades Trigonométricas - Wikipedia, La Enciclopedia LibreGustavo MayenNoch keine Bewertungen
- Propiedades de La Roca Yacimiento - La Comunidad PetroleraDokument48 SeitenPropiedades de La Roca Yacimiento - La Comunidad PetroleraNicole PirelaNoch keine Bewertungen
- UntitledDokument67 SeitenUntitledLuisNoch keine Bewertungen
- Baldosas de Bajo Coste Hechas Con Bolsas Plásticas 3Dokument30 SeitenBaldosas de Bajo Coste Hechas Con Bolsas Plásticas 3Sergio Enrique Rosales CruzNoch keine Bewertungen
- Mantenimiento de Tablero Electricos.Dokument20 SeitenMantenimiento de Tablero Electricos.Jose David Munyoz AlemanNoch keine Bewertungen
- Poligonal AbiertaDokument26 SeitenPoligonal Abierta18121584100% (2)
- Dueñas Flores Marco 2° PC Pi 524 ADokument7 SeitenDueñas Flores Marco 2° PC Pi 524 AMarco Dueñas FloresNoch keine Bewertungen
- HT PISOS MICRO - EXTRALISOS Abr 2015Dokument4 SeitenHT PISOS MICRO - EXTRALISOS Abr 2015Chimi AlessandroNoch keine Bewertungen
- Informe de Laboratorio-Densidad LinealDokument17 SeitenInforme de Laboratorio-Densidad Linealandres almagroNoch keine Bewertungen
- Unidad III - ServotransmsionesDokument54 SeitenUnidad III - ServotransmsionesIvan De La Cruz GagoNoch keine Bewertungen
- Aportes Del Interaccionismo Simbolico A Las Teorias de La OrganizacionDokument22 SeitenAportes Del Interaccionismo Simbolico A Las Teorias de La OrganizacionmavelopezNoch keine Bewertungen
- Cuestionario de Ciencias II Con Énfasis en FísicaDokument4 SeitenCuestionario de Ciencias II Con Énfasis en FísicaLoupita SazsloNoch keine Bewertungen
- Medidores Caudal MolineteDokument8 SeitenMedidores Caudal MolineteManuel MartinezNoch keine Bewertungen
- TESIS Morínigo Veiluva Gisele PDFDokument152 SeitenTESIS Morínigo Veiluva Gisele PDFJhérson RabanalNoch keine Bewertungen
- Sistema de Refrigeración Por PropanoDokument16 SeitenSistema de Refrigeración Por PropanorolandoNoch keine Bewertungen
- XR 8300 - 8600D - ManualDokument136 SeitenXR 8300 - 8600D - ManualErikt Salvador Yepez Cruz0% (1)
- Albañileria EstructuralDokument88 SeitenAlbañileria EstructuralAguirre Gutierrez100% (1)
- Tarea No. 2-ADokument4 SeitenTarea No. 2-AAnnytza Hernández De AbreuNoch keine Bewertungen
- Lab - Asociacion de ResistenciasDokument6 SeitenLab - Asociacion de Resistenciassteeven9andre9sayagoNoch keine Bewertungen
- Cuento Sobre Cómo Se Formaron Los PlanetasDokument3 SeitenCuento Sobre Cómo Se Formaron Los PlanetasinesNoch keine Bewertungen
- Cargas Eléctricas y Cuerpos ElectrizadosDokument9 SeitenCargas Eléctricas y Cuerpos ElectrizadosLuis Miguel Sulca HuamaniNoch keine Bewertungen
- Laboratorios Secundarios AcreditadosDokument204 SeitenLaboratorios Secundarios AcreditadosAlfredo RamirezNoch keine Bewertungen
- Laboratori Programa de MantenimientoDokument514 SeitenLaboratori Programa de MantenimientoJesus Rene Arocutipa CentellasNoch keine Bewertungen
- 3 Ley de NewtonDokument3 Seiten3 Ley de NewtonAnonymous xwEihrUNoch keine Bewertungen
- Practic As Fluid OsDokument126 SeitenPractic As Fluid OsCESAR AUGUSTO VASQUEZ RUIZNoch keine Bewertungen
- Tuberías - Clasificación y Caídas de PresiónDokument28 SeitenTuberías - Clasificación y Caídas de PresiónRebeca P. ZarazúaNoch keine Bewertungen