Das könnte Ihnen auch gefallen
- Presentacion HitosDokument2 SeitenPresentacion HitosAntonio Cedillo VázquezNoch keine Bewertungen
- Lakehead UniversityDokument4 SeitenLakehead UniversityAntonio Cedillo VázquezNoch keine Bewertungen
- Guia Mecanismos PDFDokument2 SeitenGuia Mecanismos PDFAntonio Cedillo VázquezNoch keine Bewertungen
- Simbologia ElectronicaDokument64 SeitenSimbologia ElectronicaJairo Alonso Castrillon Marulanda100% (2)
- Neumatica Normas ISODokument13 SeitenNeumatica Normas ISOaicvigo1973Noch keine Bewertungen
- N PDFDokument2 SeitenN PDFGaspararrietatorranoNoch keine Bewertungen
- Simbologia ElectronicaDokument64 SeitenSimbologia ElectronicaJairo Alonso Castrillon Marulanda100% (2)
- PIC16F877 ResumenDokument22 SeitenPIC16F877 ResumenCarlosperezmNoch keine Bewertungen
- BajarDokument38 SeitenBajardannielherreraNoch keine Bewertungen
- 20 Ejercicios de LevasDokument34 Seiten20 Ejercicios de LevasMijail Casa90% (10)
- Analisis de MecanismosDokument2 SeitenAnalisis de MecanismosAntonio Cedillo VázquezNoch keine Bewertungen
- Lectur y Cuestionario Pato PolloDokument1 SeiteLectur y Cuestionario Pato PolloAntonio Cedillo VázquezNoch keine Bewertungen
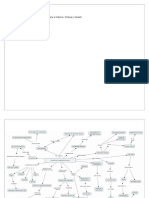
- Naturaleza Humana Mapa MentalDokument2 SeitenNaturaleza Humana Mapa MentalAntonio Cedillo VázquezNoch keine Bewertungen
- TEMA 10 Interfase ElectrificadaCP13022018Dokument38 SeitenTEMA 10 Interfase ElectrificadaCP13022018CésarNoch keine Bewertungen
- Informe Metodo Del HidorometroDokument5 SeitenInforme Metodo Del HidorometroCarlos PilcoNoch keine Bewertungen
- Clase 10 - Vibraciones MecanicasDokument26 SeitenClase 10 - Vibraciones MecanicasMishel Carita JcsNoch keine Bewertungen
- Fisica Cap 08 (Dinámica)Dokument28 SeitenFisica Cap 08 (Dinámica)Evert ChoqueNoch keine Bewertungen
- Momento Angular PDFDokument17 SeitenMomento Angular PDFJimOrdoñezJzNoch keine Bewertungen
- Informe de Laboratorio Mediciones Electricas Fisica ElectromagneticaDokument12 SeitenInforme de Laboratorio Mediciones Electricas Fisica ElectromagneticaThe RamírezNoch keine Bewertungen
- Práctica #6 de Teoría de Física IIDokument14 SeitenPráctica #6 de Teoría de Física IIMiguelangel1000 HD100% (1)
- Cálculo de La Evapotranspiración PotencialDokument27 SeitenCálculo de La Evapotranspiración PotencialMarco Rafael DíazNoch keine Bewertungen
- TEMARIO EstaticaDokument6 SeitenTEMARIO EstaticaDiego GonzalezNoch keine Bewertungen
- Tarea Auxiliar 3Dokument4 SeitenTarea Auxiliar 3Flavia SerranoNoch keine Bewertungen
- Tema 1 Esfuerzos y DeformacionesDokument36 SeitenTema 1 Esfuerzos y DeformacionesIbeth ..Noch keine Bewertungen
- 11 Magnitudes y Unidades Del Si PDFDokument20 Seiten11 Magnitudes y Unidades Del Si PDFana rubelia taborda jimenezNoch keine Bewertungen
- Equilibrio Gas LiquidoDokument5 SeitenEquilibrio Gas LiquidoRenzo Acevedo Cano100% (1)
- CentipoiseDokument6 SeitenCentipoiseLuis SegarraNoch keine Bewertungen
- Convección Natural y Forzada, Teoría PDFDokument4 SeitenConvección Natural y Forzada, Teoría PDFmarlen cotaNoch keine Bewertungen
- Proteccion TransformadoresDokument3 SeitenProteccion TransformadoresElmo VillaseñorNoch keine Bewertungen
- Ejercicios-Factores-Conversion Con SoluciónDokument6 SeitenEjercicios-Factores-Conversion Con SoluciónJuanNoch keine Bewertungen
- Laboratorios 678 de Ing ElectricaDokument10 SeitenLaboratorios 678 de Ing Electricafran100% (1)
- Programacion Especifica Del CongresoDokument67 SeitenProgramacion Especifica Del CongresoHéctor F BonillaNoch keine Bewertungen
- Prueba Saber 3Dokument4 SeitenPrueba Saber 3Johana HerreraNoch keine Bewertungen
- Módulo Vi - TermofísicaDokument56 SeitenMódulo Vi - TermofísicaIsaac MuñozNoch keine Bewertungen
- Física Universitaria Con Física Moderna 2 - Young, H. D., & Freedman, R. A. 14 Ed., 2018-Capitulo 29Dokument35 SeitenFísica Universitaria Con Física Moderna 2 - Young, H. D., & Freedman, R. A. 14 Ed., 2018-Capitulo 29JF ProNoch keine Bewertungen
- Física IDokument4 SeitenFísica IERICK GIOVANNY GUTIERREZ HERENCIANoch keine Bewertungen
- Metodos Numericos - Tarea 3Dokument9 SeitenMetodos Numericos - Tarea 3Jacobo Camacho PeraltaNoch keine Bewertungen
- Sturm LiovilleDokument5 SeitenSturm LiovilleKevin Toro GonzalezNoch keine Bewertungen
- Espacios VectorialesDokument15 SeitenEspacios Vectorialesjosuneu7211Noch keine Bewertungen
- Resistencia de Aislamiento (LABORATORIO N°01)Dokument22 SeitenResistencia de Aislamiento (LABORATORIO N°01)Judá DMichel's Rodríguez MarrerosNoch keine Bewertungen
- Diagramas de Flujo de Flotación PDFDokument12 SeitenDiagramas de Flujo de Flotación PDFDanny joaquinNoch keine Bewertungen
- Declinacion MagneticaDokument18 SeitenDeclinacion MagneticaMabel Estefania Bacilio RiveraNoch keine Bewertungen
- TFG - García Lorite, Luis Álvaro PDFDokument263 SeitenTFG - García Lorite, Luis Álvaro PDFLuis AlarconNoch keine Bewertungen