Das könnte Ihnen auch gefallen
- 100 Circuitos de Shields para MotoresVon Everand100 Circuitos de Shields para MotoresBewertung: 4.5 von 5 Sternen4.5/5 (4)
- Tipos y Caracteristicas de CONTROLADORDokument7 SeitenTipos y Caracteristicas de CONTROLADORAlejandro ArangoNoch keine Bewertungen
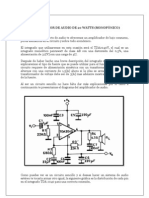
- Amplificador de Audio de 20 WattsDokument3 SeitenAmplificador de Audio de 20 WattsHolger Mera CarrilloNoch keine Bewertungen
- Examen1 1397Dokument3 SeitenExamen1 1397Ariel Bernabé DonaireNoch keine Bewertungen
- Controlador Lógico Programable HITACHIDokument6 SeitenControlador Lógico Programable HITACHICharles IriarteNoch keine Bewertungen
- Entradas y Salidas Analogicas y Digitales Mediante Arduino y El Programa LabviewDokument5 SeitenEntradas y Salidas Analogicas y Digitales Mediante Arduino y El Programa LabviewDiego Armando Garcia RuizNoch keine Bewertungen
- Informe de Laboratorio ElectroneumaticaDokument7 SeitenInforme de Laboratorio ElectroneumaticaJeisson Ardila LópezNoch keine Bewertungen
- Tipos de Aislamiento Del MedioDokument13 SeitenTipos de Aislamiento Del MedioSinai AstarothNoch keine Bewertungen
- Reporte Del Puente HDokument3 SeitenReporte Del Puente HManuel DSaarabio100% (1)
- Cargas ResistivasDokument5 SeitenCargas ResistivasJean H. Reyes Aguilar80% (5)
- Jerarquia de La InformaticaDokument3 SeitenJerarquia de La InformaticaJuan Manuel Fernandez NovoaNoch keine Bewertungen
- Diagrama de Bloques Proyecto FinalDokument6 SeitenDiagrama de Bloques Proyecto Finalsic.correoNoch keine Bewertungen
- Alistamiento de Maquina y Puesto de Trabajo 2Dokument7 SeitenAlistamiento de Maquina y Puesto de Trabajo 2DanielMedinaMendozaNoch keine Bewertungen
- Taller 5 - Tablero EléctricoDokument4 SeitenTaller 5 - Tablero EléctricoGabriel AcevedoNoch keine Bewertungen
- Fallas TiposDokument6 SeitenFallas TiposAidae SaucedaNoch keine Bewertungen
- Proyecto Electrico, Trabajo FinalDokument14 SeitenProyecto Electrico, Trabajo FinalANDERSON GABRIEL ARENAS LUQUENoch keine Bewertungen
- 2086 - SP Marca ADBDokument2 Seiten2086 - SP Marca ADBMillan SanNoch keine Bewertungen
- Catalogo Accesorios de FresadoraDokument10 SeitenCatalogo Accesorios de FresadoraValentina Di Donato100% (1)
- Codigo Carro BluetoothDokument3 SeitenCodigo Carro BluetoothJhonatan Andres Lamus FigueroaNoch keine Bewertungen
- Sistemas de Accionamiento de Los RobotsDokument8 SeitenSistemas de Accionamiento de Los RobotsGiovanni MendezNoch keine Bewertungen
- Informe Proyecto Final Ruleta DigitalDokument18 SeitenInforme Proyecto Final Ruleta DigitalLuis Ricardo SánchezNoch keine Bewertungen
- Avances Tecnologicos en Sistemas ElectricosDokument4 SeitenAvances Tecnologicos en Sistemas Electricoscristian villavicencio almeydaNoch keine Bewertungen
- Proyecto Monitor de Bateria para AutomovilDokument2 SeitenProyecto Monitor de Bateria para AutomovilJunior Ademir Flores VargasNoch keine Bewertungen
- Variador de FrecuenciaDokument9 SeitenVariador de FrecuenciaAnonymous 5nt9ob0sNoch keine Bewertungen
- Recuperación Inversa Del Diodo-Patiño PDFDokument3 SeitenRecuperación Inversa Del Diodo-Patiño PDFandresc.pc100% (1)
- Practia 2 - Maqs CNCDokument6 SeitenPractia 2 - Maqs CNCedi treviñoNoch keine Bewertungen
- Práctica 1. Medición de Voltaje, Corriente y Resistencia en Circuitos Básicos de CD Utilizando para Su Comprobación Las Leyes de Ohm y de KirchhoffDokument5 SeitenPráctica 1. Medición de Voltaje, Corriente y Resistencia en Circuitos Básicos de CD Utilizando para Su Comprobación Las Leyes de Ohm y de KirchhoffAlexis Lucas RizoNoch keine Bewertungen
- Control de Fase DirectoDokument7 SeitenControl de Fase DirectoMaricelaCrisMJNoch keine Bewertungen
- Comandos C++Dokument74 SeitenComandos C++Anita Navarro Juárez100% (1)
- Practica N 1 Rectificadores Monofasicos No ReguladosDokument9 SeitenPractica N 1 Rectificadores Monofasicos No ReguladosAndrés GarcíaNoch keine Bewertungen
- Componentes Electrónicos Diodos, Transistores y TiristoresDokument61 SeitenComponentes Electrónicos Diodos, Transistores y TiristoresManu Horn100% (1)
- Articulación UniversalDokument8 SeitenArticulación UniversalGabo RocketPower MorenoNoch keine Bewertungen
- Unidad 2 Elementos de CostosDokument2 SeitenUnidad 2 Elementos de Costosalejandropano0100% (1)
- Diseño y Ajuste de Controladores PidDokument132 SeitenDiseño y Ajuste de Controladores PidAbraham Humberto Pedroza Flores50% (2)
- Reguladores de Voltaje Discretos e IntegradosDokument4 SeitenReguladores de Voltaje Discretos e Integradoswilliam.123Noch keine Bewertungen
- Marco Teórico Del Labo 2Dokument3 SeitenMarco Teórico Del Labo 2PedroNoch keine Bewertungen
- Conclusiones - Parte FinalDokument2 SeitenConclusiones - Parte Finalcesargabriel_94Noch keine Bewertungen
- Prototipo de Llenadora Automática de BotellasDokument18 SeitenPrototipo de Llenadora Automática de Botellasjose2704100% (2)
- Aplicaciones Industriales Circuitos CombinacionalesDokument4 SeitenAplicaciones Industriales Circuitos CombinacionalesvicNoch keine Bewertungen
- Instalaciones-Electricas-Comerciales1 qfrqR9s viPgOIVDokument28 SeitenInstalaciones-Electricas-Comerciales1 qfrqR9s viPgOIVMilagros Danna Alave HuancaNoch keine Bewertungen
- Levantamiento de Observaciones - IEDokument1 SeiteLevantamiento de Observaciones - IELuis PantojaNoch keine Bewertungen
- Tipos de ConvertidoresDokument15 SeitenTipos de ConvertidoresAJ Luis100% (1)
- Informe IV Componentes ElectronicosDokument9 SeitenInforme IV Componentes ElectronicosCarlos Andres Castillo CastellanosNoch keine Bewertungen
- Diodo LedDokument4 SeitenDiodo Ledkoro joroNoch keine Bewertungen
- Transistor de Unión BipolarDokument9 SeitenTransistor de Unión BipolarpastorasabiaNoch keine Bewertungen
- Actividad Central Unidad 4Dokument7 SeitenActividad Central Unidad 4Jesus Piñeros100% (1)
- Actividad 2Dokument4 SeitenActividad 2Julian David Alcala ForeroNoch keine Bewertungen
- g66 Ciclo Fijo de Seguimiento de PerfilDokument14 Seiteng66 Ciclo Fijo de Seguimiento de PerfilJuandeDiosNoch keine Bewertungen
- Aplicación de La Compuerta NANDDokument9 SeitenAplicación de La Compuerta NANDCristian GuachaminNoch keine Bewertungen
- Compuerta LógicaDokument5 SeitenCompuerta LógicaAbelardo Otero MercadoNoch keine Bewertungen
- Informe PLCDokument23 SeitenInforme PLCMatiasNoch keine Bewertungen
- Practica AdcDokument6 SeitenPractica AdcAnonymous vjtInlUSJfNoch keine Bewertungen
- Tarea 1 InstrumentaciónDokument18 SeitenTarea 1 Instrumentaciónmarco100% (1)
- Central CalimaDokument23 SeitenCentral Calimalicasti12800% (1)
- Comparadores Logicos DigtalesDokument5 SeitenComparadores Logicos DigtalesDarwinNoch keine Bewertungen
- Qué Es El Voltaje de Circuito AbiertoDokument3 SeitenQué Es El Voltaje de Circuito AbiertoWilly TurdoNoch keine Bewertungen
- TurbomáquinasDokument11 SeitenTurbomáquinasFabiola Andrea Bravo MuñozNoch keine Bewertungen
- Manual Microprocesador PICDokument278 SeitenManual Microprocesador PICJhonValladaresSandovalNoch keine Bewertungen
- Laboratorio 8Dokument7 SeitenLaboratorio 8ana maria SanchezNoch keine Bewertungen
- Estructura ExternaDokument7 SeitenEstructura ExternaNelsonNoch keine Bewertungen
- Elementos Tipo de Banda VDokument9 SeitenElementos Tipo de Banda VChurosLocosNoch keine Bewertungen
- Exposicion Ecuaciones Cuadraticas-1Dokument10 SeitenExposicion Ecuaciones Cuadraticas-1ChurosLocosNoch keine Bewertungen
- Organización Del Recurso Humano y Organigrama General de La EmpresaDokument10 SeitenOrganización Del Recurso Humano y Organigrama General de La EmpresaChurosLocosNoch keine Bewertungen
- Electricidad-Teoria y TecnologiaDokument118 SeitenElectricidad-Teoria y Tecnologiaormicanb100% (1)
- De Multiplex OresDokument41 SeitenDe Multiplex OresChurosLocosNoch keine Bewertungen
- Sistema de EncendidoDokument19 SeitenSistema de EncendidoChurosLocosNoch keine Bewertungen
- Material Control I Parte 2Dokument55 SeitenMaterial Control I Parte 2ChurosLocosNoch keine Bewertungen
- Informe RodamientosDokument21 SeitenInforme RodamientosChurosLocosNoch keine Bewertungen
- Clasificacion de Los Tornillos Sin FinDokument6 SeitenClasificacion de Los Tornillos Sin FinChurosLocosNoch keine Bewertungen
- DurezaDokument18 SeitenDurezaGabriel GarzaNoch keine Bewertungen
- Proyecto - Dobladora de LaminasDokument14 SeitenProyecto - Dobladora de LaminasChurosLocos50% (2)
- 2Dokument5 Seiten2ChurosLocosNoch keine Bewertungen
- Informe 1 Elementos II FFFDokument21 SeitenInforme 1 Elementos II FFFChurosLocosNoch keine Bewertungen
- Presentacion Del ProyectoDokument20 SeitenPresentacion Del ProyectoChurosLocosNoch keine Bewertungen
- Consulta Protecciones BP2Dokument7 SeitenConsulta Protecciones BP2ChurosLocosNoch keine Bewertungen
- Caldero de Pronaca Diapos PILOSODokument18 SeitenCaldero de Pronaca Diapos PILOSOChurosLocosNoch keine Bewertungen
- Introducción A Las Redes de Comunicación IndustrialDokument19 SeitenIntroducción A Las Redes de Comunicación IndustrialpericodlpNoch keine Bewertungen
- Termo PlacasDokument4 SeitenTermo PlacasChurosLocosNoch keine Bewertungen
- Apertura Cierre Puerta GarajeDokument6 SeitenApertura Cierre Puerta GarajecyyclopeNoch keine Bewertungen
- Sesion 3-4Dokument7 SeitenSesion 3-4ChurosLocosNoch keine Bewertungen
- Informe de CalderoDokument9 SeitenInforme de CalderoChurosLocosNoch keine Bewertungen
- Mecanismo de Cuatro BarrasDokument6 SeitenMecanismo de Cuatro BarrasChurosLocosNoch keine Bewertungen
- Informe de TermoDokument17 SeitenInforme de TermoChurosLocosNoch keine Bewertungen
- Centrales Como Sacar Curva de Carga PDFDokument29 SeitenCentrales Como Sacar Curva de Carga PDFChurosLocosNoch keine Bewertungen
- Espinterometro ALTO VOLTAJEDokument6 SeitenEspinterometro ALTO VOLTAJEChurosLocosNoch keine Bewertungen
- Verbos RegularesDokument19 SeitenVerbos RegularesChurosLocosNoch keine Bewertungen
- Mecanismo de Cuatro BarrasDokument5 SeitenMecanismo de Cuatro BarrasChurosLocosNoch keine Bewertungen
- Alto Vol MetodosDokument17 SeitenAlto Vol MetodosChurosLocosNoch keine Bewertungen
- Jorge Muñoz EXPOSICION CALIDAD 6-6-16Dokument44 SeitenJorge Muñoz EXPOSICION CALIDAD 6-6-16ChurosLocosNoch keine Bewertungen
- Exa Sim MS 6 2020Dokument7 SeitenExa Sim MS 6 2020Zaira C. Ortiz0% (1)
- MSDS Teycer DB OP ES v17.1Dokument11 SeitenMSDS Teycer DB OP ES v17.1Ing_RaulNoch keine Bewertungen
- CLASE 5 y 6. Captura y Esfuerzo de PescaDokument43 SeitenCLASE 5 y 6. Captura y Esfuerzo de PescaMeller Caceres RabelloNoch keine Bewertungen
- Catalogo General 2016 - Es PDFDokument412 SeitenCatalogo General 2016 - Es PDFPamela Catalán Contreras0% (1)
- MRUv20190615 80556Dokument4 SeitenMRUv20190615 80556Jose Aaron Rios CordovaNoch keine Bewertungen
- SESION 09-Conociendo Las Formas de EnergiaDokument6 SeitenSESION 09-Conociendo Las Formas de EnergiaCrystell GrandaNoch keine Bewertungen
- Cuadernillo Dibujos CorrectoDokument30 SeitenCuadernillo Dibujos CorrectoJeika Mora GonzalezNoch keine Bewertungen
- LA ORACIÓN COMPUESTA (Nuevo)Dokument6 SeitenLA ORACIÓN COMPUESTA (Nuevo)arubio_formacion_ticNoch keine Bewertungen
- Taxonomia AvesDokument17 SeitenTaxonomia AvesedgarNoch keine Bewertungen
- Sikadur-501 (Seguridad)Dokument11 SeitenSikadur-501 (Seguridad)GERENCIA COMERCIAL EYM TECNIK PAOLA BENAVIDESNoch keine Bewertungen
- Farmacia2201 - Equipo5 - Obtención de Halogenuros de Alquilo A Partir de Diferentes AlcoholesDokument4 SeitenFarmacia2201 - Equipo5 - Obtención de Halogenuros de Alquilo A Partir de Diferentes AlcoholesAndrea CosíoNoch keine Bewertungen
- Anexo 1 - Formato de Entrega - Paso 1Dokument4 SeitenAnexo 1 - Formato de Entrega - Paso 1emily gil bermudezNoch keine Bewertungen
- Transferencia de Calor MoysesDokument9 SeitenTransferencia de Calor MoysesMoyse Alejandro VigilNoch keine Bewertungen
- Práctica 1 PDFDokument3 SeitenPráctica 1 PDFVICTORNoch keine Bewertungen
- Bromato-Potasio en El PanDokument5 SeitenBromato-Potasio en El PanTomas Ignacio ScagliottiNoch keine Bewertungen
- Simulador 2020 Con Respuestas PDFDokument43 SeitenSimulador 2020 Con Respuestas PDFKenny ZuñigaNoch keine Bewertungen
- Plan de Desarrollo Municipal para El Municipio de Oporapa PeriodoDokument84 SeitenPlan de Desarrollo Municipal para El Municipio de Oporapa PeriodoSERGIO ANDRES MOLINA MENDIETANoch keine Bewertungen
- Agi 2014 T047 PDFDokument41 SeitenAgi 2014 T047 PDFSloth45Noch keine Bewertungen
- ACTIVIDAD 3,4 INTEGRANTES Bustamante Samuel, Rosa Bustamante y Cecilia TomalaDokument11 SeitenACTIVIDAD 3,4 INTEGRANTES Bustamante Samuel, Rosa Bustamante y Cecilia TomalaRosa Alexandra BustamanteNoch keine Bewertungen
- Taller 4Dokument4 SeitenTaller 4Juliana RuizNoch keine Bewertungen
- Actividad Test DISCDokument2 SeitenActividad Test DISCDiego Luis PerezNoch keine Bewertungen
- El Arte de Amar Sofia SánchezDokument8 SeitenEl Arte de Amar Sofia SánchezÁlvaro Revello BarbozaNoch keine Bewertungen
- Grado 10 - RemovedDokument44 SeitenGrado 10 - RemovedNESTORNoch keine Bewertungen
- Presentación (Matemáticas)Dokument16 SeitenPresentación (Matemáticas)Angely VNoch keine Bewertungen
- Teorías de Desarrollo Económico y Social Giovanni e ReyesDokument26 SeitenTeorías de Desarrollo Económico y Social Giovanni e ReyesMónica Alejandra IbañezNoch keine Bewertungen
- Distribuciones Probabilisticas ContinuasDokument61 SeitenDistribuciones Probabilisticas ContinuasBRYAN DANIEL ARAUJO GARAYNoch keine Bewertungen
- Alren G L3 U3Dokument13 SeitenAlren G L3 U3andres villarroelNoch keine Bewertungen
- Archivo de ExamenesDokument2 SeitenArchivo de ExamenesMishael MamaniNoch keine Bewertungen
- Habilidades c3 m6 Ana CurbeloDokument4 SeitenHabilidades c3 m6 Ana CurbeloAna Paula CurbeloNoch keine Bewertungen
- MOTIVACIONDokument5 SeitenMOTIVACIONRossy GarzaNoch keine Bewertungen