Das könnte Ihnen auch gefallen
- Perkins 3008 WorkshopDokument256 SeitenPerkins 3008 Workshophusan shah100% (1)
- WheelHorse Eaton Model 7 Service ManualDokument40 SeitenWheelHorse Eaton Model 7 Service ManualKevins Small Engine and Tractor Service71% (7)
- 12.yanmar 12AYM WST HD882HD1030 DatasheetDokument2 Seiten12.yanmar 12AYM WST HD882HD1030 DatasheetAchank BulqiaNoch keine Bewertungen
- Bel252 252xl Technical Reference Mar09Dokument59 SeitenBel252 252xl Technical Reference Mar09christineNoch keine Bewertungen
- Wire Rope Slings CapacitiesDokument1 SeiteWire Rope Slings CapacitiesAdvent ManurungNoch keine Bewertungen
- Craftsman 3 Bin Craftsman Bagger 917.249890Dokument16 SeitenCraftsman 3 Bin Craftsman Bagger 917.249890Kevins Small Engine and Tractor Service100% (1)
- Dimensions Reducing - Mss Sp97: Weldolet®Dokument2 SeitenDimensions Reducing - Mss Sp97: Weldolet®Emer Roy Castillo OlivosNoch keine Bewertungen
- EH Oil Pump SOPDokument8 SeitenEH Oil Pump SOPSonratNoch keine Bewertungen
- Gearless LiftEquip enDokument7 SeitenGearless LiftEquip enمحمدحماد100% (1)
- Lesson Plan For Making Extension FinalDokument3 SeitenLesson Plan For Making Extension FinalPaul Bulanadi Badiang33% (3)
- Pipe Weight With WaterDokument8 SeitenPipe Weight With Waterdheerajdorlikar100% (1)
- Mitsubishi Colt CZT - TuningDokument7 SeitenMitsubishi Colt CZT - Tuningmomo fuciNoch keine Bewertungen
- RoofBolter - Technical Specification-FinalDokument5 SeitenRoofBolter - Technical Specification-FinalSushantNoch keine Bewertungen
- V E00B0003B Size-Range MetricDokument1 SeiteV E00B0003B Size-Range MetricopremapodpritisokNoch keine Bewertungen
- Weldolet DimensionDokument4 SeitenWeldolet DimensionabhishekNoch keine Bewertungen
- Carbon Steel / Alloy Steel / Seamless Pipe: Download SpecificationDokument2 SeitenCarbon Steel / Alloy Steel / Seamless Pipe: Download SpecificationSreenubabu Kandru100% (1)
- ACSR Conductor Data SheetsDokument4 SeitenACSR Conductor Data SheetsPrasad Yeluripati100% (2)
- Galvanized Structural Bridge Rope: ASTM A603Dokument1 SeiteGalvanized Structural Bridge Rope: ASTM A603Gilberto ChangNoch keine Bewertungen
- Handbook Chapter15 DisplacementVentilationDokument41 SeitenHandbook Chapter15 DisplacementVentilationJoao Sousa100% (1)
- Ring Size Jewels5Dokument3 SeitenRing Size Jewels5karanNoch keine Bewertungen
- N. C. No/Nom Insu. Total Area Dia. O.D. Weight mm2 MM MM KG/KM N. C. No/Nom Insu. Total Area Dia. O.D. Weight mm2 MM MM KG/KMDokument1 SeiteN. C. No/Nom Insu. Total Area Dia. O.D. Weight mm2 MM MM KG/KM N. C. No/Nom Insu. Total Area Dia. O.D. Weight mm2 MM MM KG/KMHansika RajapakshaNoch keine Bewertungen
- Gator Supply Company - Galvanized Wire Rope - Galvanized Wire Rope - 6x37 ClassDokument1 SeiteGator Supply Company - Galvanized Wire Rope - Galvanized Wire Rope - 6x37 ClassMarcos LópezNoch keine Bewertungen
- Wiretknik Swage DimensionsDokument1 SeiteWiretknik Swage DimensionsMuhammad Najam AbbasNoch keine Bewertungen
- Resistance and Voltage Measurements Lab ReportDokument3 SeitenResistance and Voltage Measurements Lab ReportgloriaNoch keine Bewertungen
- Steel Plate Thickness and Weight: Nominal Size Thickness Weight (lb/ft2) in MMDokument2 SeitenSteel Plate Thickness and Weight: Nominal Size Thickness Weight (lb/ft2) in MMNaufal HadiNoch keine Bewertungen
- Dailey Hydraulic Fishing Jar 6 PDFDokument1 SeiteDailey Hydraulic Fishing Jar 6 PDFMuhammad ShahrukhNoch keine Bewertungen
- Ring Size GuideDokument8 SeitenRing Size GuideS SoniaNoch keine Bewertungen
- TDC ACME General PurposeDokument1 SeiteTDC ACME General Purposedlemay06Noch keine Bewertungen
- Mechanical-Splice Wire Rope Sling: 115 IWRCDokument4 SeitenMechanical-Splice Wire Rope Sling: 115 IWRCokifabianNoch keine Bewertungen
- Heat Exchanger Tube - Principal BWG Sizes: Outside Diameter Birmingham Wire Gauge (BWG)Dokument1 SeiteHeat Exchanger Tube - Principal BWG Sizes: Outside Diameter Birmingham Wire Gauge (BWG)amr kouranyNoch keine Bewertungen
- F C Width Across Corners Basic Max Width Across FlatsDokument8 SeitenF C Width Across Corners Basic Max Width Across FlatsJJGM120Noch keine Bewertungen
- Nozzle Load For Flange Rating Class 150#: Nozzle Size Fa (KN) FL (KN) FC (KN) MT (KNM) ML (KNM) MC (KNM)Dokument6 SeitenNozzle Load For Flange Rating Class 150#: Nozzle Size Fa (KN) FL (KN) FC (KN) MT (KNM) ML (KNM) MC (KNM)olekNoch keine Bewertungen
- Cable EstructuralDokument2 SeitenCable EstructuralSebastián RomaníNoch keine Bewertungen
- Dimensions in Inches of Weld Neck Flanges and Stud Bolts ASME B16.5 Pressure Class 150Dokument5 SeitenDimensions in Inches of Weld Neck Flanges and Stud Bolts ASME B16.5 Pressure Class 150RAVI KATHIRAVANNoch keine Bewertungen
- Mild Steel Black and Galvanised PipesDokument3 SeitenMild Steel Black and Galvanised PipesKarthigeyan R RkgNoch keine Bewertungen
- Bronze BushingDokument6 SeitenBronze BushingVijet BhandiwadNoch keine Bewertungen
- GRAPAS CMDokument1 SeiteGRAPAS CMjm467191Noch keine Bewertungen
- Galvanized Steel Wire Strands (GSW) JIS G 3537: 1994Dokument1 SeiteGalvanized Steel Wire Strands (GSW) JIS G 3537: 1994boedak korporatNoch keine Bewertungen
- Keyway DimensionsDokument3 SeitenKeyway Dimensionstinkku donNoch keine Bewertungen
- Class 600 - Standard Connection Specifications: Length Weights Stud Bolt Size Flange Barrel OD Bolting NutDokument1 SeiteClass 600 - Standard Connection Specifications: Length Weights Stud Bolt Size Flange Barrel OD Bolting NutNice OrioleNoch keine Bewertungen
- Long Weld Necks 600Dokument1 SeiteLong Weld Necks 600Nice OrioleNoch keine Bewertungen
- D1051191072 - Wira Anggara - Tugas 1 HLDokument2 SeitenD1051191072 - Wira Anggara - Tugas 1 HLGunawan DemianNoch keine Bewertungen
- Standard Weight Pipe Dimensional DataDokument1 SeiteStandard Weight Pipe Dimensional Datatarno12Noch keine Bewertungen
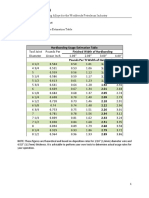
- Hardbanding Usage Estimation Table for Petroleum Industry Tool JointsDokument1 SeiteHardbanding Usage Estimation Table for Petroleum Industry Tool JointsRodrigo FernándezNoch keine Bewertungen
- Document 7-06-2023Dokument4 SeitenDocument 7-06-2023Tanmay Sales CorporationNoch keine Bewertungen
- Azrak Pipe ScheduleDokument1 SeiteAzrak Pipe ScheduleErcan YilmazNoch keine Bewertungen
- Table - Grease Lubrication ScheduleDokument1 SeiteTable - Grease Lubrication ScheduleXiangYou ChenNoch keine Bewertungen
- 6 × 19 & 6 × 37 Class Wire Rope, Bright & GalvanizedDokument3 Seiten6 × 19 & 6 × 37 Class Wire Rope, Bright & GalvanizedCody GeisendorferNoch keine Bewertungen
- Relacion de Perfiles: Varillas Placas LI LD CE IE IR TR IS OS OC OR CF ZFDokument203 SeitenRelacion de Perfiles: Varillas Placas LI LD CE IE IR TR IS OS OC OR CF ZFAlfredo Velazquez GarciaNoch keine Bewertungen
- D-CKFG Series Cast Iron Three Phase Asymchronous MotorDokument4 SeitenD-CKFG Series Cast Iron Three Phase Asymchronous MotorNaveed AhmedNoch keine Bewertungen
- CHAPAS E BARRAS - Metric Standard GaugeDokument1 SeiteCHAPAS E BARRAS - Metric Standard GaugeGaston ContrerasNoch keine Bewertungen
- Akh Knitting & Dyeing Ltd. BangladeshDokument1 SeiteAkh Knitting & Dyeing Ltd. BangladeshMd. Mamunur RashidNoch keine Bewertungen
- Bolt Dia (In) SRT Tool Ref T.H.A (In) HT Tool Ref T.H.A (In) To Obtain SRT Tool Pressure Multiply HT Tool Pressure BYDokument1 SeiteBolt Dia (In) SRT Tool Ref T.H.A (In) HT Tool Ref T.H.A (In) To Obtain SRT Tool Pressure Multiply HT Tool Pressure BYHakim HamidunNoch keine Bewertungen
- Pipe ScheduleDokument1 SeitePipe SchedulePraveenNoch keine Bewertungen
- GWL Performance DataDokument1 SeiteGWL Performance DatabcombuysaleNoch keine Bewertungen
- Weifang East Steel Pipe Co., LTDDokument8 SeitenWeifang East Steel Pipe Co., LTDdfpjliuNoch keine Bewertungen
- Imperial Bonded Seals Size ChartDokument1 SeiteImperial Bonded Seals Size ChartCraigNoch keine Bewertungen
- O-Ring Size Chart 32117Dokument14 SeitenO-Ring Size Chart 32117daverbaker1961Noch keine Bewertungen
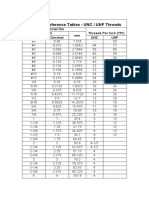
- Reference Tables for UNC and UNF Thread Sizes and PitchesDokument1 SeiteReference Tables for UNC and UNF Thread Sizes and PitchesalexrozNoch keine Bewertungen
- Piping Workbook PIDesignDokument3 SeitenPiping Workbook PIDesigngustian pandu alam herlambangNoch keine Bewertungen
- Southern Cable CatalogDokument62 SeitenSouthern Cable CatalogZahid ElectronNoch keine Bewertungen
- Ind. Hyd - Adator Thread Data PDFDokument3 SeitenInd. Hyd - Adator Thread Data PDFlangkanNoch keine Bewertungen
- Sweeney2016 SupplementaryDokument35 SeitenSweeney2016 SupplementarypelleNoch keine Bewertungen
- Flemish Eye Wire Rope SlingsDokument3 SeitenFlemish Eye Wire Rope SlingsSalihNoch keine Bewertungen
- PVC-Insulated Cables: 450/750V Single-Core PVC Insulated, Non-Sheathed CableDokument1 SeitePVC-Insulated Cables: 450/750V Single-Core PVC Insulated, Non-Sheathed CableThan Zaw HtayNoch keine Bewertungen
- M 13 Barras N 7 Nudos R 3 Reacciones: Bara Etn A LDokument3 SeitenM 13 Barras N 7 Nudos R 3 Reacciones: Bara Etn A LEsaú Renzo VicenteNoch keine Bewertungen
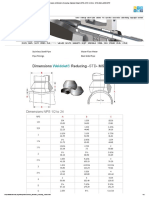
- Dimensions of Weldolets Reducing, Standard Weight (STD), NPS 1 - 2 (3 - 4) - NPS (20) 24, MSS-SP97Dokument2 SeitenDimensions of Weldolets Reducing, Standard Weight (STD), NPS 1 - 2 (3 - 4) - NPS (20) 24, MSS-SP97Qiuniu100% (1)
- Copper Nickel Metric Pipe StandardsDokument1 SeiteCopper Nickel Metric Pipe StandardsRahul JeganathanNoch keine Bewertungen
- Ampacities and Mechanical Properties of Rectangular Copper Busbars: Table 1. Ampacities of Copper No. 110Dokument4 SeitenAmpacities and Mechanical Properties of Rectangular Copper Busbars: Table 1. Ampacities of Copper No. 110Kiran KarthikNoch keine Bewertungen
- Modern Size-Exclusion Liquid Chromatography: Practice of Gel Permeation and Gel Filtration ChromatographyVon EverandModern Size-Exclusion Liquid Chromatography: Practice of Gel Permeation and Gel Filtration ChromatographyNoch keine Bewertungen
- PIDControlTheory Rev3Dokument6 SeitenPIDControlTheory Rev3fdashhanaNoch keine Bewertungen
- Technical Data: NPN Power Silicon TransistorDokument3 SeitenTechnical Data: NPN Power Silicon TransistorchikulenkaNoch keine Bewertungen
- 2SB1269Dokument5 Seiten2SB1269James Conrad RamosNoch keine Bewertungen
- Transistor NPN 2n222aDokument8 SeitenTransistor NPN 2n222aRoberto Eduardo Tenorio RamosNoch keine Bewertungen
- Pulley Based Movable CraneDokument1 SeitePulley Based Movable CraneHari PrasadNoch keine Bewertungen
- Serial Number Range: From SN RL412-101Dokument112 SeitenSerial Number Range: From SN RL412-101EffendiCibuburNoch keine Bewertungen
- Chapter 04 - Gear TrainsDokument60 SeitenChapter 04 - Gear TrainsMuhammad ZarifNoch keine Bewertungen
- Everything You Need to Know About Lathe MachinesDokument23 SeitenEverything You Need to Know About Lathe MachinesNeeraj JithuNoch keine Bewertungen
- Mobilair M120-23Dokument8 SeitenMobilair M120-23purchasingNoch keine Bewertungen
- Invoice Omniparts 031404 04 0489Dokument12 SeitenInvoice Omniparts 031404 04 0489Paula Andrea Gómez NuñezNoch keine Bewertungen
- INSTRUCTIONS For Rcexl Ignitions Ver 2.0Dokument4 SeitenINSTRUCTIONS For Rcexl Ignitions Ver 2.0Мирослав ЈовићNoch keine Bewertungen
- G9190 图册Dokument3 SeitenG9190 图册Johnson LeeNoch keine Bewertungen
- Machine Design IIDokument3 SeitenMachine Design IIRushabh PatelNoch keine Bewertungen
- Lit 750h t3 Pap750ht3 enDokument2 SeitenLit 750h t3 Pap750ht3 enSlVNoch keine Bewertungen
- Servodirectii OrbitaleDokument12 SeitenServodirectii OrbitaleIonescu AngelNoch keine Bewertungen
- Hydraulic System: 5.1 Location of Main Hydraulic ComponentsDokument53 SeitenHydraulic System: 5.1 Location of Main Hydraulic ComponentsMinh TânNoch keine Bewertungen
- Automatic Transmission For Range Rover 4 6 HSE P68Dokument20 SeitenAutomatic Transmission For Range Rover 4 6 HSE P68Louise RogersNoch keine Bewertungen
- Service Manual: Das Herz Der Heizung The Heart of HeatingDokument94 SeitenService Manual: Das Herz Der Heizung The Heart of HeatingCedric ChatonNoch keine Bewertungen
- VMC Side Mount Tool Changer Spindle Orientation Offset Parameter 257Dokument3 SeitenVMC Side Mount Tool Changer Spindle Orientation Offset Parameter 257ecaldera10Noch keine Bewertungen
- Air Pressure Balance & Threshold Pressure Tests: Vehicle DataDokument4 SeitenAir Pressure Balance & Threshold Pressure Tests: Vehicle DataZIBA KHADIBINoch keine Bewertungen
- 11 - 009 - Series 1600 New Interface - Smart ConnectDokument3 Seiten11 - 009 - Series 1600 New Interface - Smart ConnectMichaels SanclementeNoch keine Bewertungen
- Operating Instructions: D 2866 E D 2866 TE D 2866 LE D 2866 LXEDokument6 SeitenOperating Instructions: D 2866 E D 2866 TE D 2866 LE D 2866 LXEMozibor Rahman MozibNoch keine Bewertungen
- 5-Engine CharacteristicsDokument22 Seiten5-Engine CharacteristicsAli ŞENERNoch keine Bewertungen