Das könnte Ihnen auch gefallen
- DSP HandoutsDokument11 SeitenDSP HandoutsG A E SATISH KUMARNoch keine Bewertungen
- Common Phase Error Estimation and Suppression in OFDMDokument5 SeitenCommon Phase Error Estimation and Suppression in OFDMemadhusNoch keine Bewertungen
- HST.582J / 6.555J / 16.456J Biomedical Signal and Image ProcessingDokument25 SeitenHST.582J / 6.555J / 16.456J Biomedical Signal and Image ProcessingSrinivas SaiNoch keine Bewertungen
- On The Performance of The MIMO Zero-Forcing Receiver in The Presence of Channel Estimation ErrorDokument6 SeitenOn The Performance of The MIMO Zero-Forcing Receiver in The Presence of Channel Estimation ErrorPawanKumar BarnwalNoch keine Bewertungen
- E 5 EqDokument56 SeitenE 5 EqMehwish AliNoch keine Bewertungen
- CH 5Dokument43 SeitenCH 5ubyisismayilNoch keine Bewertungen
- BLAST System: Different Decoders With Different Antennas: Pargat Singh Sidhu, Amit Grover, Neeti GroverDokument6 SeitenBLAST System: Different Decoders With Different Antennas: Pargat Singh Sidhu, Amit Grover, Neeti GroverIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalNoch keine Bewertungen
- 8-Channel Models EstimationDokument11 Seiten8-Channel Models EstimationLadissa HarvidiantiNoch keine Bewertungen
- 08.508 DSP Lab Expt No 6 HandoutDokument7 Seiten08.508 DSP Lab Expt No 6 HandoutAssini HussainNoch keine Bewertungen
- Eigen Value Based (EBB) Beamforming Precoding Design For Downlink Capacity Improvement in Multiuser MIMO ChannelDokument7 SeitenEigen Value Based (EBB) Beamforming Precoding Design For Downlink Capacity Improvement in Multiuser MIMO ChannelKrishna Ram BudhathokiNoch keine Bewertungen
- A Performance Study of MIMO Detectors: Christoph Windpassinger, Lutz Lampe, Robert F. H. Fischer, Thorsten HehnDokument16 SeitenA Performance Study of MIMO Detectors: Christoph Windpassinger, Lutz Lampe, Robert F. H. Fischer, Thorsten HehnLe-Nam TranNoch keine Bewertungen
- DC 5 Receiver NewDokument228 SeitenDC 5 Receiver NewersimohitNoch keine Bewertungen
- DSP Lab 1 PDFDokument10 SeitenDSP Lab 1 PDFSaif HassanNoch keine Bewertungen
- CM Kaltfl 080709Dokument5 SeitenCM Kaltfl 080709Võ Quy QuangNoch keine Bewertungen
- BER For BPSK in OFDM With Rayleigh Multipath ChannelDokument6 SeitenBER For BPSK in OFDM With Rayleigh Multipath ChannelNaveen Kumar ChadalavadaNoch keine Bewertungen
- Channel Estimation ModelingDokument15 SeitenChannel Estimation ModelingJohn TranNoch keine Bewertungen
- Experiment: 1: Program: Write A Program To Implement Matrix Algebra. Software Used: MATLAB 7.6Dokument28 SeitenExperiment: 1: Program: Write A Program To Implement Matrix Algebra. Software Used: MATLAB 7.6Akash GoelNoch keine Bewertungen
- Print Fading ChannelDokument18 SeitenPrint Fading ChannelRishabh TewariNoch keine Bewertungen
- Performance of Diversity Combining Techniques For Antenna ArraysDokument4 SeitenPerformance of Diversity Combining Techniques For Antenna ArraysTushar SaxenaNoch keine Bewertungen
- Performance Analysis of Multiuser MIMO Systems With Zero Forcing ReceiversDokument5 SeitenPerformance Analysis of Multiuser MIMO Systems With Zero Forcing ReceiversNetsanet JemalNoch keine Bewertungen
- A Conceptual Study of OFDM-based Multiple Access SchemesDokument7 SeitenA Conceptual Study of OFDM-based Multiple Access SchemeswoodksdNoch keine Bewertungen
- DWC-USRP - LectureNotes PDFDokument84 SeitenDWC-USRP - LectureNotes PDFJesús Mendoza PadillaNoch keine Bewertungen
- CSPII Lab InstructionsDokument8 SeitenCSPII Lab InstructionsSadiqur Rahaman SumonNoch keine Bewertungen
- 1 Synchronization and Frequency Estimation Errors: 1.1 Doppler EffectsDokument15 Seiten1 Synchronization and Frequency Estimation Errors: 1.1 Doppler EffectsRajib MukherjeeNoch keine Bewertungen
- MIMO Channel Estimation Using The LS and MMSE Algorithm: Mohammed Ali Mohammed MOQBEL, Wangdong, Al-Marhabi Zaid AliDokument10 SeitenMIMO Channel Estimation Using The LS and MMSE Algorithm: Mohammed Ali Mohammed MOQBEL, Wangdong, Al-Marhabi Zaid AliKoustab MaityNoch keine Bewertungen
- Matlab Tutorial 2Dokument7 SeitenMatlab Tutorial 2Shivram TabibuNoch keine Bewertungen
- Algorithm: Wireless Communication Experiments Ex. No. 1 AimDokument16 SeitenAlgorithm: Wireless Communication Experiments Ex. No. 1 Aimseedr eviteNoch keine Bewertungen
- Symbol Detection in MIMO System: y HX + VDokument12 SeitenSymbol Detection in MIMO System: y HX + VhoangthuyanhNoch keine Bewertungen
- Least Bit Error Rate Adaptive Neural EqualisersDokument8 SeitenLeast Bit Error Rate Adaptive Neural EqualisersVivek RoyNoch keine Bewertungen
- What A Blast!: Dominik Zankl, Stefan Schuster, Reinhard Feger, and Andreas StelzerDokument18 SeitenWhat A Blast!: Dominik Zankl, Stefan Schuster, Reinhard Feger, and Andreas Stelzerrahul kumarNoch keine Bewertungen
- MU-MIMO BC Capacity Linear PrecodingDokument2 SeitenMU-MIMO BC Capacity Linear Precodingboss_bandorNoch keine Bewertungen
- Multivariate Distributions: Why Random Vectors?Dokument14 SeitenMultivariate Distributions: Why Random Vectors?Michael GarciaNoch keine Bewertungen
- 10.0 Lesson Plan: Answer Questions Robust Estimators Maximum Likelihood EstimatorsDokument15 Seiten10.0 Lesson Plan: Answer Questions Robust Estimators Maximum Likelihood EstimatorsKhushboo GambhirNoch keine Bewertungen
- ICI CANCELLATION TECHNIQUES FOR OFDM SYSTEMSDokument6 SeitenICI CANCELLATION TECHNIQUES FOR OFDM SYSTEMSjavicho2006Noch keine Bewertungen
- MATLAB Lab Project - Mtech IIsemDokument61 SeitenMATLAB Lab Project - Mtech IIsemSatya NarayanaNoch keine Bewertungen
- Computer Networks UNIT-2 Syllabus: Physical Layer - Fourier Analysis - Bandwidth Limited Signals - The MaximumDokument39 SeitenComputer Networks UNIT-2 Syllabus: Physical Layer - Fourier Analysis - Bandwidth Limited Signals - The MaximumRaju ImandiNoch keine Bewertungen
- Random VaribleDokument12 SeitenRandom Varibleramesh_jain_kirtikaNoch keine Bewertungen
- Introduction To Equalization: Guy Wolf Roy Ron Guy ShwartzDokument50 SeitenIntroduction To Equalization: Guy Wolf Roy Ron Guy ShwartzShilpi RaiNoch keine Bewertungen
- Probability AssignmentDokument10 SeitenProbability Assignmentrabya waheedNoch keine Bewertungen
- Unit II Radio ReceiversDokument29 SeitenUnit II Radio ReceiversecekluNoch keine Bewertungen
- EEM496 Communication Systems Laboratory - Report6 - Probability of Error For Mary PSK, Qam and Scatter PlotsDokument18 SeitenEEM496 Communication Systems Laboratory - Report6 - Probability of Error For Mary PSK, Qam and Scatter Plotsdonatello84Noch keine Bewertungen
- Chapter 12 - Modulation and Demodulation Techniques For Wireless Communication SystemsDokument21 SeitenChapter 12 - Modulation and Demodulation Techniques For Wireless Communication SystemsproteccionesNoch keine Bewertungen
- Optimization Examples PDFDokument4 SeitenOptimization Examples PDFSalman GillNoch keine Bewertungen
- Joint Synchronization and Channel Estimation For MIMO-OFDM Systems Using EM AlgorithmDokument8 SeitenJoint Synchronization and Channel Estimation For MIMO-OFDM Systems Using EM AlgorithmInternational Journal of Application or Innovation in Engineering & ManagementNoch keine Bewertungen
- Robust ML Detection Algorithm For Mimo Receivers in Presence of Channel Estimation ErrorDokument5 SeitenRobust ML Detection Algorithm For Mimo Receivers in Presence of Channel Estimation ErrortrNoch keine Bewertungen
- Development of Channel Estimation Methods and OptimizationDokument6 SeitenDevelopment of Channel Estimation Methods and OptimizationInternational Journal of Application or Innovation in Engineering & ManagementNoch keine Bewertungen
- EE4601 Communication Systems: Week 13 Linear Zero Forcing EqualizationDokument14 SeitenEE4601 Communication Systems: Week 13 Linear Zero Forcing Equalizationamjc16Noch keine Bewertungen
- Improved Adaptive Bit Error Rate Performance For Fading Channel CommunicationDokument10 SeitenImproved Adaptive Bit Error Rate Performance For Fading Channel CommunicationInternational Journal of Application or Innovation in Engineering & ManagementNoch keine Bewertungen
- Assignment Rough WorkDokument7 SeitenAssignment Rough Workmunna_mantra896919Noch keine Bewertungen
- MATLAB Simulation of Frequency Diversity SignalsDokument57 SeitenMATLAB Simulation of Frequency Diversity Signalscuong260388Noch keine Bewertungen
- Fading SimulationDokument45 SeitenFading SimulationAtef Al-Kotafi Al-AbdiNoch keine Bewertungen
- A Comparative Analysis of LS and MMSE Channel Estimation Techniques For MIMO-OFDM SystemDokument6 SeitenA Comparative Analysis of LS and MMSE Channel Estimation Techniques For MIMO-OFDM SystempreetiNoch keine Bewertungen
- Matlab Exercises To Explain Discrete Fourier Transforms PDFDokument9 SeitenMatlab Exercises To Explain Discrete Fourier Transforms PDFsenthil kumarNoch keine Bewertungen
- Labsheet-1: Question No.1:Basic Signal Generation and PlottingDokument15 SeitenLabsheet-1: Question No.1:Basic Signal Generation and PlottingmanasNoch keine Bewertungen
- A Low Complexity Channel Estimation Algorithm For Massive MIMO SystemDokument12 SeitenA Low Complexity Channel Estimation Algorithm For Massive MIMO SystemilbahiNoch keine Bewertungen
- Channel Estimation For Massive MIMO Using Gaussian-Mixture Bayesian LearningDokument78 SeitenChannel Estimation For Massive MIMO Using Gaussian-Mixture Bayesian Learningjagadeesh jagadeNoch keine Bewertungen
- Chapter-1: 1.1. Wireless Communication SystemsDokument28 SeitenChapter-1: 1.1. Wireless Communication Systemskarthick_mariner92Noch keine Bewertungen
- Statistics 116 - Fall 2004 Theory of Probability Practice Final # 2 - SolutionsDokument7 SeitenStatistics 116 - Fall 2004 Theory of Probability Practice Final # 2 - SolutionsKrishna Chaitanya SrikantaNoch keine Bewertungen
- Unit 5Dokument47 SeitenUnit 5menakadevieceNoch keine Bewertungen
- Part BDokument16 SeitenPart BRamakrishnan Harihara VenkatasubramaniaNoch keine Bewertungen
- B. Tech. Centre - December, 2010 - January, 2011Dokument1 SeiteB. Tech. Centre - December, 2010 - January, 2011Gunzayn SarthyaNoch keine Bewertungen
- Mail ServerDokument46 SeitenMail ServerGunzayn SarthyaNoch keine Bewertungen
- Evaluating Forensic DNA EvidenceDokument44 SeitenEvaluating Forensic DNA EvidenceGunzayn SarthyaNoch keine Bewertungen
- IP - SubnettingDokument20 SeitenIP - SubnettingAbhishek kapoorNoch keine Bewertungen
- Computer Networks CS 280: Project 2 Client Server Programming Fall, 2003Dokument17 SeitenComputer Networks CS 280: Project 2 Client Server Programming Fall, 2003Gunzayn SarthyaNoch keine Bewertungen
- Computer Networks CS 280: Project 2 Client Server Programming Fall, 2003Dokument17 SeitenComputer Networks CS 280: Project 2 Client Server Programming Fall, 2003Gunzayn SarthyaNoch keine Bewertungen
- Mechanical Engineer Resume - Digambar BhangeDokument3 SeitenMechanical Engineer Resume - Digambar BhangeTOP DHAMAKANoch keine Bewertungen
- Builder's Greywater Guide Branched DrainDokument4 SeitenBuilder's Greywater Guide Branched DrainGreen Action Sustainable Technology GroupNoch keine Bewertungen
- Sheet #6Dokument2 SeitenSheet #6AHMED BAKRNoch keine Bewertungen
- UAV Course SyllabusDokument3 SeitenUAV Course Syllabushindaputra374100% (3)
- Astral Column Pipe PricelistDokument4 SeitenAstral Column Pipe PricelistVaishamNoch keine Bewertungen
- Module 8 SAHITA ConcreteDokument11 SeitenModule 8 SAHITA ConcreteHarrybfnNoch keine Bewertungen
- حل جميع المعادلات الكهربائيةDokument60 Seitenحل جميع المعادلات الكهربائيةGandhi HammoudNoch keine Bewertungen
- 0 EDEM Applications MeDokument16 Seiten0 EDEM Applications MeRuben PurcaNoch keine Bewertungen
- 2 Biogas Kristianstad Brochure 2009Dokument4 Seiten2 Biogas Kristianstad Brochure 2009Baris SamirNoch keine Bewertungen
- Method of MomentsDokument114 SeitenMethod of MomentsankladhaNoch keine Bewertungen
- OD Main Switch & OD OFF Indicator Light CircuitDokument4 SeitenOD Main Switch & OD OFF Indicator Light Circuitcelestino tuliaoNoch keine Bewertungen
- Load-Modulated Arrays Emerging MIMO TechnologyDokument83 SeitenLoad-Modulated Arrays Emerging MIMO TechnologysmkraliNoch keine Bewertungen
- Newsletter Template NewDokument4 SeitenNewsletter Template Newapi-458544253Noch keine Bewertungen
- RefrigerationDokument11 SeitenRefrigerationBroAmirNoch keine Bewertungen
- GRC Fiori End User Guide Final - V2Dokument75 SeitenGRC Fiori End User Guide Final - V2Subhash BharmappaNoch keine Bewertungen
- Sample Style GuideDokument5 SeitenSample Style Guideapi-282547722Noch keine Bewertungen
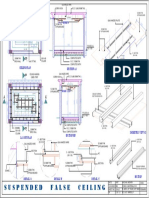
- Gypsum Ceiling PDFDokument1 SeiteGypsum Ceiling PDFAanchal Mishra100% (1)
- General Purpose Relay SpecsDokument2 SeitenGeneral Purpose Relay SpecsAndres DiazNoch keine Bewertungen
- Yellow Electric Pump: Job Card Package Title: HIM - A318/A319/A320/ A321 Tail Number - MSN - FSN ALL ContinousDokument4 SeitenYellow Electric Pump: Job Card Package Title: HIM - A318/A319/A320/ A321 Tail Number - MSN - FSN ALL ContinousSuman BajracharyaNoch keine Bewertungen
- Schedule of Rates 2011 Rev1Dokument144 SeitenSchedule of Rates 2011 Rev1Screen BiruNoch keine Bewertungen
- Product Data Sheet: Linear Switch - iSSW - 2 C/O - 20A - 250 V AC - 3 PositionsDokument2 SeitenProduct Data Sheet: Linear Switch - iSSW - 2 C/O - 20A - 250 V AC - 3 PositionsMR. TNoch keine Bewertungen
- Touch Panel Debug Info Register ValuesDokument17 SeitenTouch Panel Debug Info Register ValuesAlghazyNoch keine Bewertungen
- 21st Bomber Command Tactical Mission Report 146, OcrDokument54 Seiten21st Bomber Command Tactical Mission Report 146, OcrJapanAirRaidsNoch keine Bewertungen
- Transmission ImpairmentsDokument49 SeitenTransmission ImpairmentsLaurentiuStanciuNoch keine Bewertungen
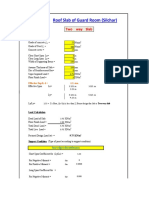
- Roof Slab of Guard RoomDokument3 SeitenRoof Slab of Guard RoomAditya KumarNoch keine Bewertungen
- MGS3750 28FDokument4 SeitenMGS3750 28FAndi Z Pasuloi PatongaiNoch keine Bewertungen
- Human Plus Machine A New Era of Automation in ManufacturingDokument8 SeitenHuman Plus Machine A New Era of Automation in ManufacturingDuarte CRosaNoch keine Bewertungen
- Argus OXM CDokument2 SeitenArgus OXM Candik100% (1)
- Educational Technology & Education Conferences - January To June 2016 - Clayton R WrightDokument93 SeitenEducational Technology & Education Conferences - January To June 2016 - Clayton R WrightEsperanza Román MendozaNoch keine Bewertungen
- PV Design WorksheetDokument4 SeitenPV Design WorksheetLarry Walker II100% (1)