Das könnte Ihnen auch gefallen
- Inclination and SlopeDokument17 SeitenInclination and SlopeAse SharewNoch keine Bewertungen
- The Joyce of Science - The Theory of Relativity in Finnegans WakeDokument12 SeitenThe Joyce of Science - The Theory of Relativity in Finnegans WakeAhmadNoch keine Bewertungen
- Wang Paper 1995Dokument16 SeitenWang Paper 1995Amit Narayan RaiNoch keine Bewertungen
- Machine Learning Phases of Strongly Correlated FermionsDokument9 SeitenMachine Learning Phases of Strongly Correlated FermionsalfonsoNoch keine Bewertungen
- An Adaptive Particle Swarm Optimization Algorithm Based On Cat MapDokument8 SeitenAn Adaptive Particle Swarm Optimization Algorithm Based On Cat MapmenguemengueNoch keine Bewertungen
- Approximate entropy as a measure of system complexityDokument5 SeitenApproximate entropy as a measure of system complexitySangat BaikNoch keine Bewertungen
- Local - PCA - It Is Against PCADokument24 SeitenLocal - PCA - It Is Against PCAdr musafirNoch keine Bewertungen
- Storace (2004) - Piecewise-Linear Approximation of Nonlinear Dynamical SystemsDokument13 SeitenStorace (2004) - Piecewise-Linear Approximation of Nonlinear Dynamical SystemsSohibul HajahNoch keine Bewertungen
- Optimizing Sensor Deployment for IoT Using CPSO and ABC AlgorithmsDokument6 SeitenOptimizing Sensor Deployment for IoT Using CPSO and ABC AlgorithmsHemanth S.NNoch keine Bewertungen
- Bayes Optimal Template Matching For Spike Sorting - Combining Fisher Discriminant Analysis With Optimal FilteringDokument21 SeitenBayes Optimal Template Matching For Spike Sorting - Combining Fisher Discriminant Analysis With Optimal FilteringatewogboNoch keine Bewertungen
- Particle Swarm Optimization: From ScholarpediaDokument4 SeitenParticle Swarm Optimization: From ScholarpediaVIJAYPUTRANoch keine Bewertungen
- Data Clustering Using Particle Swarm Optimization: PSO Is PSO by PSO ADokument6 SeitenData Clustering Using Particle Swarm Optimization: PSO Is PSO by PSO ARodrigo Possidonio NoronhaNoch keine Bewertungen
- Inference in Particle Tracking Experiments by Passing Messages Between ImagesDokument6 SeitenInference in Particle Tracking Experiments by Passing Messages Between ImagesLiquan PeiNoch keine Bewertungen
- Nutron Transport EquationDokument41 SeitenNutron Transport Equationmuti_khan20006003Noch keine Bewertungen
- Particle Swarm Optimization of Neural Network Architectures and WeightsDokument4 SeitenParticle Swarm Optimization of Neural Network Architectures and WeightsgalaxystarNoch keine Bewertungen
- GambardellaDokument4 SeitenGambardellaapi-3831656Noch keine Bewertungen
- A Visualization Framework For The Analysis of Neuromuscular SimulationsDokument11 SeitenA Visualization Framework For The Analysis of Neuromuscular Simulationsyacipo evyushNoch keine Bewertungen
- Three-Dimensional Localization Algorithm of Wireless Sensor Networks Base On Particle Swarm OptimizationDokument6 SeitenThree-Dimensional Localization Algorithm of Wireless Sensor Networks Base On Particle Swarm OptimizationVasu PasupuletiNoch keine Bewertungen
- 2006 Use of The Interacting Multiple Model Algorithm With Multiple SensorsDokument10 Seiten2006 Use of The Interacting Multiple Model Algorithm With Multiple SensorsMohamed Hechmi JERIDINoch keine Bewertungen
- 5W1HDokument2 Seiten5W1HMarcelo Geraldo TeixeiraNoch keine Bewertungen
- Linear-Time Dynamics Using Lagrange Multipliers: Robotics Institute Carnegie Mellon UniversityDokument10 SeitenLinear-Time Dynamics Using Lagrange Multipliers: Robotics Institute Carnegie Mellon UniversityEMellaNoch keine Bewertungen
- Entropy: Deep Residual Learning For Nonlinear RegressionDokument14 SeitenEntropy: Deep Residual Learning For Nonlinear RegressionPradeep SinglaNoch keine Bewertungen
- An Overview of Advances of Pattern Recognition Systems in Computer VisionDokument27 SeitenAn Overview of Advances of Pattern Recognition Systems in Computer VisionHoang LMNoch keine Bewertungen
- 1 s2.0 S0167278920308186 MainDokument10 Seiten1 s2.0 S0167278920308186 MainJuan ZarateNoch keine Bewertungen
- How Many Hidden Layers and NodesDokument15 SeitenHow Many Hidden Layers and Nodesaksinha4Noch keine Bewertungen
- Continuous data assimilation for 3D Navier-StokesDokument23 SeitenContinuous data assimilation for 3D Navier-StokesPhan Đức AnNoch keine Bewertungen
- Signal Correlation Prediction Using Convolutional Neural NetworksDokument12 SeitenSignal Correlation Prediction Using Convolutional Neural NetworksWesley BecariNoch keine Bewertungen
- Qualitative Obstacle Detection: Conference PaperDokument7 SeitenQualitative Obstacle Detection: Conference PaperDereckNoch keine Bewertungen
- Optimization of Fuzzy C Means With Darwinian Particle Swarm Optimization On MRI ImageDokument4 SeitenOptimization of Fuzzy C Means With Darwinian Particle Swarm Optimization On MRI ImageerpublicationNoch keine Bewertungen
- Meeting RecognisionDokument4 SeitenMeeting RecognisionpeterijNoch keine Bewertungen
- Cuda Barnes-Hut Project WriteupDokument6 SeitenCuda Barnes-Hut Project Writeupapi-639903084Noch keine Bewertungen
- A Study of Neural Network Algorithms: Namrata AnejaDokument3 SeitenA Study of Neural Network Algorithms: Namrata Anejawww.irjes.comNoch keine Bewertungen
- Low Cost Motion CaptureDokument5 SeitenLow Cost Motion CaptureioscherzoNoch keine Bewertungen
- The Particle Swarm - Explosion, Stability, and Convergence in A Multidimensional Complex Space PDFDokument16 SeitenThe Particle Swarm - Explosion, Stability, and Convergence in A Multidimensional Complex Space PDFAzad HannanNoch keine Bewertungen
- Symbolic Pregression, Discovering Physical Laws From Raw Distorted Video, Udrescu, Tegmark, 2020Dokument13 SeitenSymbolic Pregression, Discovering Physical Laws From Raw Distorted Video, Udrescu, Tegmark, 2020Mario Leon GaticaNoch keine Bewertungen
- A Prospective Study On Algorithms Adapted To The Spatial Frequency in TomographyDokument6 SeitenA Prospective Study On Algorithms Adapted To The Spatial Frequency in TomographySChouetNoch keine Bewertungen
- Driving Environmental Change Detection Subsystem in A Vision-Based Driver Assistance SystemDokument6 SeitenDriving Environmental Change Detection Subsystem in A Vision-Based Driver Assistance Systemcristi_pet4742Noch keine Bewertungen
- NMR simulator models quantum computingDokument7 SeitenNMR simulator models quantum computingsepot24093Noch keine Bewertungen
- 5 - Lstm-Time-SeriesDokument6 Seiten5 - Lstm-Time-SerieswilliamNoch keine Bewertungen
- Dietmar Heinke and Fred H. Hamker - Comparing Neural Networks: A Benchmark On Growing Neural Gas, Growing Cell Structures, and Fuzzy ARTMAPDokument13 SeitenDietmar Heinke and Fred H. Hamker - Comparing Neural Networks: A Benchmark On Growing Neural Gas, Growing Cell Structures, and Fuzzy ARTMAPTuhmaNoch keine Bewertungen
- Neural Network Theorems for Feed Forward ArchitecturesDokument17 SeitenNeural Network Theorems for Feed Forward ArchitecturesBagya GaneshNoch keine Bewertungen
- Training Cellular Automata For Salt and Pepper Noise FilteringDokument6 SeitenTraining Cellular Automata For Salt and Pepper Noise FilteringKatherineRocíoNoch keine Bewertungen
- Neural NetworksDokument12 SeitenNeural NetworksP PNoch keine Bewertungen
- 1285 سراجهDokument4 Seiten1285 سراجهm1.nourianNoch keine Bewertungen
- Point Mass Filter Based Matching Algorithm in Gravity Aided Underwater NavigationDokument8 SeitenPoint Mass Filter Based Matching Algorithm in Gravity Aided Underwater NavigationPrasad PatilNoch keine Bewertungen
- A Shortest-Path Network Problem Using An Annealed Ant System AlgorithmDokument6 SeitenA Shortest-Path Network Problem Using An Annealed Ant System AlgorithmAyudikta Fitri SalaamNoch keine Bewertungen
- Chameleon PDFDokument10 SeitenChameleon PDFAnonymous iIy4RsPCJ100% (1)
- Ant Algorithm For Grid Scheduling Problem: Abstract. Grid Computing Is A Form of Distributed Computing That inDokument8 SeitenAnt Algorithm For Grid Scheduling Problem: Abstract. Grid Computing Is A Form of Distributed Computing That inEngr Safiyan Abubakar GizaNoch keine Bewertungen
- Gray Box 1994Dokument10 SeitenGray Box 1994Mario CalderonNoch keine Bewertungen
- Optimal PMU Placement Using Modified ACODokument4 SeitenOptimal PMU Placement Using Modified ACORajesh GangwarNoch keine Bewertungen
- Clifford Sze-Tsan Choy and Wan-Chi Siu - Fast Sequential Implementation of "Neural-Gas" Network For Vector QuantizationDokument4 SeitenClifford Sze-Tsan Choy and Wan-Chi Siu - Fast Sequential Implementation of "Neural-Gas" Network For Vector QuantizationTuhmaNoch keine Bewertungen
- LaurentDokument2 SeitenLaurentmahdi123456789Noch keine Bewertungen
- Tracking The Progress of The Lanczos Algorithm For Large Symmetric EigenproblemsDokument21 SeitenTracking The Progress of The Lanczos Algorithm For Large Symmetric Eigenproblemsjuan carlos molano toroNoch keine Bewertungen
- Comparison of Genetic Algorithm and Particle Swarm OptimizationDokument6 SeitenComparison of Genetic Algorithm and Particle Swarm OptimizationMikemekanicsNoch keine Bewertungen
- Comparative Study On Filtering Techniques of Digital Image ProcessingDokument6 SeitenComparative Study On Filtering Techniques of Digital Image ProcessingMizanur RahamanNoch keine Bewertungen
- Movement prediction from real-world images using a liquid state machineDokument12 SeitenMovement prediction from real-world images using a liquid state machinePhuong anNoch keine Bewertungen
- Window of Multistability and Its Control in A Simple 3D Hopfield Neural Network: Application To Biomedical Image EncryptionDokument20 SeitenWindow of Multistability and Its Control in A Simple 3D Hopfield Neural Network: Application To Biomedical Image EncryptionTSAFACK NESTORNoch keine Bewertungen
- The Particle Swarm-Explosion, Stability, and Convergence in A Multidimensional Complex SpaceDokument16 SeitenThe Particle Swarm-Explosion, Stability, and Convergence in A Multidimensional Complex SpaceAbolfazl AbbasiyanNoch keine Bewertungen
- Articulated Body Motion Capture by Stochastic SearchDokument21 SeitenArticulated Body Motion Capture by Stochastic SearchCyrille LamasséNoch keine Bewertungen
- University of Bristol Research Report 08:16: SMCTC: Sequential Monte Carlo in C++Dokument36 SeitenUniversity of Bristol Research Report 08:16: SMCTC: Sequential Monte Carlo in C++Adam JohansenNoch keine Bewertungen
- Quantitative Comparison of Algorithms For Tracking Single Fluorescent ParticlesDokument11 SeitenQuantitative Comparison of Algorithms For Tracking Single Fluorescent Particles0106062007Noch keine Bewertungen
- Rsta 1915 0001Dokument26 SeitenRsta 1915 0001samik4uNoch keine Bewertungen
- AsdsadadDokument13 SeitenAsdsadadsamik4uNoch keine Bewertungen
- Rsta 1915 0001Dokument26 SeitenRsta 1915 0001samik4uNoch keine Bewertungen
- 2170 FullDokument12 Seiten2170 Fullsamik4uNoch keine Bewertungen
- Cantilever 1977Dokument16 SeitenCantilever 1977samik4uNoch keine Bewertungen
- SdsdsDokument36 SeitenSdsdssamik4uNoch keine Bewertungen
- Pco Cooke KB Shading 0603 SDokument8 SeitenPco Cooke KB Shading 0603 Ssamik4uNoch keine Bewertungen
- Omega MHS1Dokument1 SeiteOmega MHS1samik4uNoch keine Bewertungen
- Tuesday, November 8, 2022 5:29 PM: Lectures Page 1Dokument1 SeiteTuesday, November 8, 2022 5:29 PM: Lectures Page 1samik4uNoch keine Bewertungen
- Soft Matter: CommunicationDokument6 SeitenSoft Matter: Communicationsamik4uNoch keine Bewertungen
- Anthony 1997Dokument14 SeitenAnthony 1997samik4uNoch keine Bewertungen
- 3 Bit ADC Output and Basic DAQ Components ExplainedDokument3 Seiten3 Bit ADC Output and Basic DAQ Components Explainedsamik4uNoch keine Bewertungen
- Analytical Model For Predicting Maximum Spread of Droplet Impinging On Solid SurfacesDokument8 SeitenAnalytical Model For Predicting Maximum Spread of Droplet Impinging On Solid Surfacessamik4uNoch keine Bewertungen
- Axisymmetric Rim Instability of Water Droplet Impact On A Super-Hydrophobic SurfaceDokument8 SeitenAxisymmetric Rim Instability of Water Droplet Impact On A Super-Hydrophobic Surfacesamik4uNoch keine Bewertungen
- PhysRevLett 112 134501Dokument5 SeitenPhysRevLett 112 134501samik4uNoch keine Bewertungen
- WO2018075145A1Dokument49 SeitenWO2018075145A1samik4uNoch keine Bewertungen
- PhysRevFluids 4 123605Dokument9 SeitenPhysRevFluids 4 123605samik4uNoch keine Bewertungen
- Wootton2001 Article AMechanisticModelOfAcutePlatelDokument9 SeitenWootton2001 Article AMechanisticModelOfAcutePlatelsamik4uNoch keine Bewertungen
- NPTEL Mechanical Engineering - Introduction To TurbulenceDokument2 SeitenNPTEL Mechanical Engineering - Introduction To Turbulencesamik4uNoch keine Bewertungen
- Fluid Mechanics of Vascular Systems, Diseases, and ThrombosisDokument33 SeitenFluid Mechanics of Vascular Systems, Diseases, and Thrombosissamik4uNoch keine Bewertungen
- Fluid Mechanics of Vascular Systems, Diseases, and ThrombosisDokument33 SeitenFluid Mechanics of Vascular Systems, Diseases, and Thrombosissamik4uNoch keine Bewertungen
- Normal ShocksDokument21 SeitenNormal ShocksrafaqatwahNoch keine Bewertungen
- Vortex growth and stabilization for two-dimensional plunging and flapping plates with varying sweepDokument13 SeitenVortex growth and stabilization for two-dimensional plunging and flapping plates with varying sweepsamik4uNoch keine Bewertungen
- Fluid Mechanics of Vascular Systems, Diseases, and ThrombosisDokument33 SeitenFluid Mechanics of Vascular Systems, Diseases, and Thrombosissamik4uNoch keine Bewertungen
- Dynamics of Revolving Wings For Various Aspect RatiosDokument25 SeitenDynamics of Revolving Wings For Various Aspect Ratiossamik4uNoch keine Bewertungen
- Dynamics of Revolving Wings For Various Aspect RatiosDokument25 SeitenDynamics of Revolving Wings For Various Aspect Ratiossamik4uNoch keine Bewertungen
- Vortex growth and stabilization for two-dimensional plunging and flapping plates with varying sweepDokument13 SeitenVortex growth and stabilization for two-dimensional plunging and flapping plates with varying sweepsamik4uNoch keine Bewertungen
- Commentary Biomechanics of Bird Flight: Bret W. TobalskeDokument12 SeitenCommentary Biomechanics of Bird Flight: Bret W. Tobalskesamik4uNoch keine Bewertungen
- Contagious Fear: Escape Behavior Increases With Flock Size in European Gregarious BirdsDokument9 SeitenContagious Fear: Escape Behavior Increases With Flock Size in European Gregarious Birdssamik4uNoch keine Bewertungen
- AirfoilTapsv3 PDFDokument1 SeiteAirfoilTapsv3 PDFsamik4uNoch keine Bewertungen
- DEB-HAR-21-2018-2019-337-PPR-BACHELOR of COMPUTER ApplicationDokument26 SeitenDEB-HAR-21-2018-2019-337-PPR-BACHELOR of COMPUTER ApplicationAshok poddarNoch keine Bewertungen
- Aqa Comp1 W MS Jun10Dokument29 SeitenAqa Comp1 W MS Jun10Arsalan FotovatNoch keine Bewertungen
- FdsafdasDokument5 SeitenFdsafdasdonthackmexzNoch keine Bewertungen
- Hydrographs 4Dokument14 SeitenHydrographs 4RajanRanjanNoch keine Bewertungen
- Data StructuresDokument30 SeitenData StructuresSwati SukhijaNoch keine Bewertungen
- Hceh Ijer - 2014 Ncetmesd 07Dokument7 SeitenHceh Ijer - 2014 Ncetmesd 07scarface666Noch keine Bewertungen
- DSA QuizDokument313 SeitenDSA QuizHenryHai NguyenNoch keine Bewertungen
- Study pointers in C with examplesDokument6 SeitenStudy pointers in C with examplespremsagarNoch keine Bewertungen
- Iterative Methods of Richardson-Lucy-type For Image DeblurringDokument15 SeitenIterative Methods of Richardson-Lucy-type For Image DeblurringhilmanmuntahaNoch keine Bewertungen
- L 313 18.+270Dokument7 SeitenL 313 18.+270jpyusiongNoch keine Bewertungen
- 8 Antipatterns AssignmentDokument52 Seiten8 Antipatterns Assignmentdemelash kasayeNoch keine Bewertungen
- PythonDokument126 SeitenPythonATUL SHARMANoch keine Bewertungen
- Literature ReviewDokument37 SeitenLiterature ReviewFelix WalterNoch keine Bewertungen
- Salençon, J. and Pecker EC8 Foundation Bearing CapacityDokument20 SeitenSalençon, J. and Pecker EC8 Foundation Bearing CapacityYang LuNoch keine Bewertungen
- ResearchGate - FA & TADokument52 SeitenResearchGate - FA & TARonieeNoch keine Bewertungen
- Sensorless Speed Control of BLDC Using Geno-Fuzzy ControllerDokument36 SeitenSensorless Speed Control of BLDC Using Geno-Fuzzy ControllerMahmoudTahaNoch keine Bewertungen
- List of TheoremsDokument2 SeitenList of Theoremskyut netoNoch keine Bewertungen
- Network Analysis Exam QuestionsDokument1 SeiteNetwork Analysis Exam QuestionsPritam PiyushNoch keine Bewertungen
- Stats Workbook For College StudentsDokument337 SeitenStats Workbook For College StudentsClifford CurtisNoch keine Bewertungen
- Exercises 3Dokument9 SeitenExercises 3Asif MasoodNoch keine Bewertungen
- Measure of Dispersion and LocationDokument51 SeitenMeasure of Dispersion and LocationTokyo TokyoNoch keine Bewertungen
- Discrete StructuresDokument6 SeitenDiscrete Structureskripal shrestha100% (1)
- 542398flluid in ScramjetDokument38 Seiten542398flluid in ScramjetP KNoch keine Bewertungen
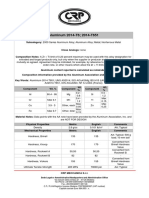
- Aluminium 2014 t6 2014 t651 PDFDokument3 SeitenAluminium 2014 t6 2014 t651 PDFAbhishek AnandNoch keine Bewertungen
- Advancedigital Communications: Instructor: Dr. M. Arif WahlaDokument34 SeitenAdvancedigital Communications: Instructor: Dr. M. Arif Wahlafahad_shamshadNoch keine Bewertungen
- Lashkari and Sarvaiya - Matlab Based Simulink Model of Phasor Measurement Unit and OptimalDokument4 SeitenLashkari and Sarvaiya - Matlab Based Simulink Model of Phasor Measurement Unit and OptimalJulio MendozaNoch keine Bewertungen
- Andrea Steaban Resume June 17Dokument4 SeitenAndrea Steaban Resume June 17api-252743869Noch keine Bewertungen
- Stress Analysis Rev 3 ReportDokument24 SeitenStress Analysis Rev 3 Reportfsasas asfaasNoch keine Bewertungen