Das könnte Ihnen auch gefallen
- Control of DC Motor Using Different Control StrategiesVon EverandControl of DC Motor Using Different Control StrategiesNoch keine Bewertungen
- Adaptive Cruise Control Sys OverviewDokument6 SeitenAdaptive Cruise Control Sys OverviewJoshua MillerNoch keine Bewertungen
- Automotive Electronic Diagnostics (Course 2)Von EverandAutomotive Electronic Diagnostics (Course 2)Bewertung: 4 von 5 Sternen4/5 (2)
- Techs em ReportDokument17 SeitenTechs em ReportShiva NageswararaoNoch keine Bewertungen
- Design of Adaptive Cruise Control (Acc)Dokument2 SeitenDesign of Adaptive Cruise Control (Acc)Sandhya ShyamasundarNoch keine Bewertungen
- Chapter 3 - Cruise Control SystemsDokument25 SeitenChapter 3 - Cruise Control Systemskhalifawhan0% (1)
- Adaptive Cruise Control SystemDokument5 SeitenAdaptive Cruise Control SystemSathish KumarNoch keine Bewertungen
- Adaptive Cruise Control: Synopsis ForDokument5 SeitenAdaptive Cruise Control: Synopsis ForKaushik GowdaNoch keine Bewertungen
- AEEDA501 - Repairing Vehicle Drive Assistance SystemsDokument86 SeitenAEEDA501 - Repairing Vehicle Drive Assistance SystemsTUYIRINGIRE JeromeNoch keine Bewertungen
- Study of Cruise Control System Used Vehicle: Ajinkya Chandratre Ajit Bhatjire Pankaj ChaudharyDokument9 SeitenStudy of Cruise Control System Used Vehicle: Ajinkya Chandratre Ajit Bhatjire Pankaj ChaudharySitota tesfayeNoch keine Bewertungen
- Adaptive Cruise Control System: Nikhil RDokument20 SeitenAdaptive Cruise Control System: Nikhil RsidjivNoch keine Bewertungen
- SSP 276 Phaeton Proximity ControlDokument40 SeitenSSP 276 Phaeton Proximity Controlภูเก็ต เป็นเกาะ100% (1)
- Speed Control - TDV6 3.0L DieselDokument18 SeitenSpeed Control - TDV6 3.0L DieselAlberto Mock GonzalesNoch keine Bewertungen
- Automatic Anti-Collision System (ACS) : DescriptionDokument3 SeitenAutomatic Anti-Collision System (ACS) : DescriptionAhmad Yani S NoorNoch keine Bewertungen
- Adaptive Cruise Control ReportDokument20 SeitenAdaptive Cruise Control ReportRohan BalramNoch keine Bewertungen
- Electronic Power Assist Steering (EPAS) SystemDokument21 SeitenElectronic Power Assist Steering (EPAS) SystemCamilo RamosNoch keine Bewertungen
- Adaptive Cruise Control SystemDokument20 SeitenAdaptive Cruise Control SystemRajesh KumarNoch keine Bewertungen
- ACC Eng 04 880976Dokument2 SeitenACC Eng 04 880976redman7207Noch keine Bewertungen
- Seminar Report FINALDokument23 SeitenSeminar Report FINALGarvit BhattNoch keine Bewertungen
- Cruise Control Operation From Zero To Preset Speed-Simulation and ImplementationDokument6 SeitenCruise Control Operation From Zero To Preset Speed-Simulation and ImplementationVijay KulkarniNoch keine Bewertungen
- Adaptive Cruise ControlDokument20 SeitenAdaptive Cruise ControlMohammad ThanzimNoch keine Bewertungen
- Diagnostic Tests of The ACC Radar System: Computer Applications in Electrical Engineering Vol. 14 2016Dokument11 SeitenDiagnostic Tests of The ACC Radar System: Computer Applications in Electrical Engineering Vol. 14 2016Kld AliNoch keine Bewertungen
- Road Wheel Control Systems: Tutor NotesDokument3 SeitenRoad Wheel Control Systems: Tutor NotesAchmad ZajidNoch keine Bewertungen
- Chapter 1Dokument52 SeitenChapter 1Bharath VasanNoch keine Bewertungen
- Servomechanism Presentation MCS - 1Dokument19 SeitenServomechanism Presentation MCS - 1HKD89100% (3)
- Pruebas ABS C2777Dokument58 SeitenPruebas ABS C2777Alirio VilchezNoch keine Bewertungen
- Case Study Adaptive Cruise ControlDokument15 SeitenCase Study Adaptive Cruise ControlsarathkumarNoch keine Bewertungen
- Cruise Control SystemDokument9 SeitenCruise Control SystemTilahun WorkuNoch keine Bewertungen
- Adaptive Cruise ControlDokument7 SeitenAdaptive Cruise ControlRohit SharmaNoch keine Bewertungen
- Servomechanism Presentation MCS 1Dokument38 SeitenServomechanism Presentation MCS 1Vipin Ramachandran PillaiNoch keine Bewertungen
- Adaptive Cruise ControlDokument25 SeitenAdaptive Cruise ControlAnu Prasad100% (1)
- Adaptive Cruise Control System Using Fuzzy Logic: M Abdelwahab, M Abdelaziz, N.ElnahasDokument3 SeitenAdaptive Cruise Control System Using Fuzzy Logic: M Abdelwahab, M Abdelaziz, N.ElnahasMcmimi91Noch keine Bewertungen
- M01CDE CouerseWKDokument62 SeitenM01CDE CouerseWKKashyap GadaNoch keine Bewertungen
- 211-02 Power Steering 2016 Mustang Description and OperationDokument56 Seiten211-02 Power Steering 2016 Mustang Description and OperationJaciel LMNoch keine Bewertungen
- 4g69 Emission Control Mitsubishi Space WagonDokument10 Seiten4g69 Emission Control Mitsubishi Space WagonMrihexNoch keine Bewertungen
- Adaptive CruiseDokument8 SeitenAdaptive CruiseVikram ReddyNoch keine Bewertungen
- Unit 12: Lesson 1 Design and Operation of Electronic Suspension ControlsDokument17 SeitenUnit 12: Lesson 1 Design and Operation of Electronic Suspension Controls2791957Noch keine Bewertungen
- 24 ACC WorkbookDokument13 Seiten24 ACC WorkbookAttila KovácsNoch keine Bewertungen
- Control Systems EngineeringDokument15 SeitenControl Systems EngineeringalikaastridNoch keine Bewertungen
- Adaptive Cruise Control Using Model Predictive ControllerDokument3 SeitenAdaptive Cruise Control Using Model Predictive ControllerInternational Journal of Innovative Science and Research TechnologyNoch keine Bewertungen
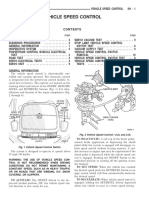
- Fig. 2 Vehicle Speed Control-2.2L and 2.5LDokument10 SeitenFig. 2 Vehicle Speed Control-2.2L and 2.5LChristian MartinezNoch keine Bewertungen
- Speed Control SystemDokument8 SeitenSpeed Control SystemDalton WiseNoch keine Bewertungen
- ACC Final ReportDokument13 SeitenACC Final ReportDeVvrat Akheriya100% (2)
- Manuali Officina Yj/Xj 1993Dokument12 SeitenManuali Officina Yj/Xj 1993stormchidNoch keine Bewertungen
- ECAS (Ing)Dokument28 SeitenECAS (Ing)nicu100% (1)
- Eeee PDFDokument4 SeitenEeee PDFFawaz PartoNoch keine Bewertungen
- Adaptive Cruise Control (ACC)Dokument14 SeitenAdaptive Cruise Control (ACC)agamal_33Noch keine Bewertungen
- Volvo - My05 07B5254T S40V50C70C30Dokument30 SeitenVolvo - My05 07B5254T S40V50C70C30sharck04100% (1)
- Ecu 750 Instruction ManualDokument8 SeitenEcu 750 Instruction ManualAu GroupsNoch keine Bewertungen
- An Adaptive Cruise Control System For AutonomousDokument8 SeitenAn Adaptive Cruise Control System For Autonomous20145327Noch keine Bewertungen
- Case Study On Cruise Control of A VehicleDokument23 SeitenCase Study On Cruise Control of A VehicleRAVINDERNoch keine Bewertungen
- System For Vehicle Safety and Traffic Co-Ordination: Prashant Gade, Inali WahaneDokument4 SeitenSystem For Vehicle Safety and Traffic Co-Ordination: Prashant Gade, Inali WahanetheijesNoch keine Bewertungen
- FP FINAL-converted (2) - Converted (2) - Converted-MergedDokument22 SeitenFP FINAL-converted (2) - Converted (2) - Converted-MergedAbdullah Raghib SiddiquiNoch keine Bewertungen
- Hillier's Fundamentals of Automotive Electronics - 2nd EditionDokument12 SeitenHillier's Fundamentals of Automotive Electronics - 2nd EditionChandrasekhar Nallam88% (8)
- Module 4 VEHICLE MOTION CONTROLDokument23 SeitenModule 4 VEHICLE MOTION CONTROLDeepa ShreeNoch keine Bewertungen
- Automatic Vehicle Speed Control System 33Dokument10 SeitenAutomatic Vehicle Speed Control System 33Varshini VuraNoch keine Bewertungen
- 2007 RobertBosch ESPDokument8 Seiten2007 RobertBosch ESPmovebe6870Noch keine Bewertungen
- Algorithms to Live By: The Computer Science of Human DecisionsVon EverandAlgorithms to Live By: The Computer Science of Human DecisionsBewertung: 4.5 von 5 Sternen4.5/5 (722)
- Cyber War: The Next Threat to National Security and What to Do About ItVon EverandCyber War: The Next Threat to National Security and What to Do About ItBewertung: 3.5 von 5 Sternen3.5/5 (66)
- Chaos Monkeys: Obscene Fortune and Random Failure in Silicon ValleyVon EverandChaos Monkeys: Obscene Fortune and Random Failure in Silicon ValleyBewertung: 3.5 von 5 Sternen3.5/5 (111)
- Generative AI: The Insights You Need from Harvard Business ReviewVon EverandGenerative AI: The Insights You Need from Harvard Business ReviewBewertung: 4.5 von 5 Sternen4.5/5 (2)
- ChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindVon EverandChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindNoch keine Bewertungen
- Chip War: The Quest to Dominate the World's Most Critical TechnologyVon EverandChip War: The Quest to Dominate the World's Most Critical TechnologyBewertung: 4.5 von 5 Sternen4.5/5 (229)
- Learn Python Programming for Beginners: Best Step-by-Step Guide for Coding with Python, Great for Kids and Adults. Includes Practical Exercises on Data Analysis, Machine Learning and More.Von EverandLearn Python Programming for Beginners: Best Step-by-Step Guide for Coding with Python, Great for Kids and Adults. Includes Practical Exercises on Data Analysis, Machine Learning and More.Bewertung: 5 von 5 Sternen5/5 (34)
- Binary Option Trading: Introduction to Binary Option TradingVon EverandBinary Option Trading: Introduction to Binary Option TradingNoch keine Bewertungen
- Scary Smart: The Future of Artificial Intelligence and How You Can Save Our WorldVon EverandScary Smart: The Future of Artificial Intelligence and How You Can Save Our WorldBewertung: 4.5 von 5 Sternen4.5/5 (55)
- Four Battlegrounds: Power in the Age of Artificial IntelligenceVon EverandFour Battlegrounds: Power in the Age of Artificial IntelligenceBewertung: 5 von 5 Sternen5/5 (5)
- HBR's 10 Must Reads on AI, Analytics, and the New Machine AgeVon EverandHBR's 10 Must Reads on AI, Analytics, and the New Machine AgeBewertung: 4.5 von 5 Sternen4.5/5 (69)
- Evaluation of Some SMS Verification Services and Virtual Credit Cards Services for Online Accounts VerificationsVon EverandEvaluation of Some SMS Verification Services and Virtual Credit Cards Services for Online Accounts VerificationsBewertung: 5 von 5 Sternen5/5 (2)
- ChatGPT Side Hustles 2024 - Unlock the Digital Goldmine and Get AI Working for You Fast with More Than 85 Side Hustle Ideas to Boost Passive Income, Create New Cash Flow, and Get Ahead of the CurveVon EverandChatGPT Side Hustles 2024 - Unlock the Digital Goldmine and Get AI Working for You Fast with More Than 85 Side Hustle Ideas to Boost Passive Income, Create New Cash Flow, and Get Ahead of the CurveNoch keine Bewertungen
- Excel Essentials: A Step-by-Step Guide with Pictures for Absolute Beginners to Master the Basics and Start Using Excel with ConfidenceVon EverandExcel Essentials: A Step-by-Step Guide with Pictures for Absolute Beginners to Master the Basics and Start Using Excel with ConfidenceNoch keine Bewertungen
- AP Computer Science A Premium, 2024: 6 Practice Tests + Comprehensive Review + Online PracticeVon EverandAP Computer Science A Premium, 2024: 6 Practice Tests + Comprehensive Review + Online PracticeNoch keine Bewertungen
- Solutions Architect's Handbook: Kick-start your career as a solutions architect by learning architecture design principles and strategiesVon EverandSolutions Architect's Handbook: Kick-start your career as a solutions architect by learning architecture design principles and strategiesNoch keine Bewertungen
- 100M Offers Made Easy: Create Your Own Irresistible Offers by Turning ChatGPT into Alex HormoziVon Everand100M Offers Made Easy: Create Your Own Irresistible Offers by Turning ChatGPT into Alex HormoziNoch keine Bewertungen
- Review of Some SMS Verification Services and Virtual Debit/Credit Cards Services for Online Accounts VerificationsVon EverandReview of Some SMS Verification Services and Virtual Debit/Credit Cards Services for Online Accounts VerificationsBewertung: 5 von 5 Sternen5/5 (1)
- Understanding Software: Max Kanat-Alexander on simplicity, coding, and how to suck less as a programmerVon EverandUnderstanding Software: Max Kanat-Alexander on simplicity, coding, and how to suck less as a programmerBewertung: 4.5 von 5 Sternen4.5/5 (44)
- The Master Algorithm: How the Quest for the Ultimate Learning Machine Will Remake Our WorldVon EverandThe Master Algorithm: How the Quest for the Ultimate Learning Machine Will Remake Our WorldBewertung: 4.5 von 5 Sternen4.5/5 (107)