Das könnte Ihnen auch gefallen
- Anthea - Service ManualDokument19 SeitenAnthea - Service Manualakhil100% (1)
- AMKCO Vibra-Screen Separator IOM Manual (Model 18'' To 72'')Dokument30 SeitenAMKCO Vibra-Screen Separator IOM Manual (Model 18'' To 72'')Ali AkbarNoch keine Bewertungen
- Manual Weigh SharkDokument50 SeitenManual Weigh SharkJuan Carlos Palomares BeltranNoch keine Bewertungen
- Tutorial 2Dokument2 SeitenTutorial 2Christoper YuanNoch keine Bewertungen
- 4100 Digital: Wheel Balancer Operators ManualDokument22 Seiten4100 Digital: Wheel Balancer Operators Manualdionisio emilio reyes jimenezNoch keine Bewertungen
- EM9980 Service 4-117248A 09-2014 UkDokument48 SeitenEM9980 Service 4-117248A 09-2014 UkIrimia MarianNoch keine Bewertungen
- 4100 Digital: Wheel Balancer Operators ManualDokument22 Seiten4100 Digital: Wheel Balancer Operators ManualASIFNoch keine Bewertungen
- Dredgepack Installation Guide For Cutter Suction DredgesDokument6 SeitenDredgepack Installation Guide For Cutter Suction DredgesHamada GadNoch keine Bewertungen
- RAS Rot2ProgDokument12 SeitenRAS Rot2ProgAlen JefryNoch keine Bewertungen
- WISKA serverNET MANUAL EN v3Dokument92 SeitenWISKA serverNET MANUAL EN v3akhilNoch keine Bewertungen
- UX Foundations Content Strategy - NotesDokument11 SeitenUX Foundations Content Strategy - NotesRache Hernandez100% (1)
- Master Template For Policies and Procedures - PCTDokument12 SeitenMaster Template For Policies and Procedures - PCTprat31Noch keine Bewertungen
- Weigh Shark 2 MANUAL August 2021Dokument92 SeitenWeigh Shark 2 MANUAL August 2021Nate SwaneyNoch keine Bewertungen
- 93ZJ Secc 8C Overhead ConsoleDokument10 Seiten93ZJ Secc 8C Overhead Consolehelgith74Noch keine Bewertungen
- Field BalancingsDokument51 SeitenField BalancingsTaraknath MukherjeeNoch keine Bewertungen
- Ritchie Helmsman Compass ManualDokument6 SeitenRitchie Helmsman Compass ManualHernan MauroNoch keine Bewertungen
- BMC CalibrationADokument10 SeitenBMC CalibrationAAngel DlsgNoch keine Bewertungen
- Ritchie Helmsman Compass ManualDokument7 SeitenRitchie Helmsman Compass ManualRoman BabaevNoch keine Bewertungen
- Cyscan MK4 Installation ManualDokument24 SeitenCyscan MK4 Installation ManualFaizulNoch keine Bewertungen
- Setting Sensor B195 RSB-D50Dokument18 SeitenSetting Sensor B195 RSB-D50kuwabbNoch keine Bewertungen
- Adhesion/Release Tester: MODEL AR-2000 Operating InstructionsDokument35 SeitenAdhesion/Release Tester: MODEL AR-2000 Operating InstructionsSarah Linville100% (1)
- Transfer CaseDokument43 SeitenTransfer CasePopescu Vasile IonNoch keine Bewertungen
- Control Panel: Installation and User's Manual Installasjon Og Brukermanual InstallationsanleitungDokument16 SeitenControl Panel: Installation and User's Manual Installasjon Og Brukermanual InstallationsanleitungAsep TatangNoch keine Bewertungen
- Manual Q7 en Q7 DuoDokument33 SeitenManual Q7 en Q7 DuoNelu TanvuiaNoch keine Bewertungen
- Cemb c205 Elect GBDokument8 SeitenCemb c205 Elect GBAndris PelsisNoch keine Bewertungen
- WH8-MicroPAP 200 - USBLoperation - Manual - Rev0Dokument20 SeitenWH8-MicroPAP 200 - USBLoperation - Manual - Rev0TrầnHữuHòaNoch keine Bewertungen
- Instalare Simrad CX 44Dokument62 SeitenInstalare Simrad CX 44Vasile NicolaeNoch keine Bewertungen
- Technote #34 Rotalign: Rotalign Ment of Cardan Shafts Using Cardan Bracket Ali 2.893setDokument5 SeitenTechnote #34 Rotalign: Rotalign Ment of Cardan Shafts Using Cardan Bracket Ali 2.893setCarlos M100% (1)
- SN 140638 54970 Design Plast GWB BaggerDokument57 SeitenSN 140638 54970 Design Plast GWB BaggerJulio MendozaNoch keine Bewertungen
- B008S0HKLQ - User GuideDokument8 SeitenB008S0HKLQ - User GuideryanmackintoshNoch keine Bewertungen
- Seccion 3BDokument68 SeitenSeccion 3BJuan Gabriel Hernandez LunaNoch keine Bewertungen
- SpheroCompact ManualDokument23 SeitenSpheroCompact ManualaeroueenNoch keine Bewertungen
- 70 - Am5k Measuring Head User Manual 4-20ma RevhDokument37 Seiten70 - Am5k Measuring Head User Manual 4-20ma Revhbaggo81Noch keine Bewertungen
- Multi-Rotor: Naza User ManualDokument40 SeitenMulti-Rotor: Naza User ManualAnonymous MGQjG1Noch keine Bewertungen
- Matrix Logger With Logger Version 11 Quick Operating InstructionsDokument11 SeitenMatrix Logger With Logger Version 11 Quick Operating InstructionsMohamedNoch keine Bewertungen
- SCCOverview PDFDokument3 SeitenSCCOverview PDFdevriesenNoch keine Bewertungen
- Instruction Manual For Globe Price Computing Scale Models GS30 and GS30TDokument12 SeitenInstruction Manual For Globe Price Computing Scale Models GS30 and GS30TManuel MoriniNoch keine Bewertungen
- Standby Compass CalibrationDokument3 SeitenStandby Compass CalibrationHarry NuryantoNoch keine Bewertungen
- Icontrol ConfiguracionDokument18 SeitenIcontrol ConfiguracionDiego ToroNoch keine Bewertungen
- Installation Instructions Performance TachometerDokument6 SeitenInstallation Instructions Performance TachometerJuan Carlos SoHeNoch keine Bewertungen
- Richie Explorer B51Dokument4 SeitenRichie Explorer B51Romie HarieNoch keine Bewertungen
- AMSLA426 Manual Megamouth 2019-12-11 PDFDokument119 SeitenAMSLA426 Manual Megamouth 2019-12-11 PDFRoger Pozo AriasNoch keine Bewertungen
- Azi1000 UGDokument53 SeitenAzi1000 UGEslam Samih El SehtNoch keine Bewertungen
- Kickert Bowed SpreaderDokument5 SeitenKickert Bowed SpreaderOSAMANoch keine Bewertungen
- 5460 Hitch CalibrationDokument4 Seiten5460 Hitch CalibrationRichNoch keine Bewertungen
- Technical Manual Mooring Winch Type MW 022-44c-E117 (KN) Dwg. 32164-1 DMT 219138Dokument119 SeitenTechnical Manual Mooring Winch Type MW 022-44c-E117 (KN) Dwg. 32164-1 DMT 219138Ciprian MariusNoch keine Bewertungen
- GyrocompassDokument6 SeitenGyrocompasstariktunadNoch keine Bewertungen
- Edda 1500 Kanepe PaketlemeDokument25 SeitenEdda 1500 Kanepe PaketlemeEMRE KAAN USTA100% (1)
- Microbeast V4 ManualDokument87 SeitenMicrobeast V4 ManualJRM STYLENoch keine Bewertungen
- Manual SpoolerDokument118 SeitenManual Spooleryubelly gómezNoch keine Bewertungen
- Cms Electronics BoardDokument11 SeitenCms Electronics BoardLuis Fernando Becerra JimenezNoch keine Bewertungen
- Configure and Test A Stepper MotorDokument3 SeitenConfigure and Test A Stepper MotorSubhasis BiswasNoch keine Bewertungen
- GMR 18/24 GMR 18 HD/24 HD: Radome Installation InstructionsDokument12 SeitenGMR 18/24 GMR 18 HD/24 HD: Radome Installation InstructionsKorushNoch keine Bewertungen
- Overload Clutches For Index Drives (Type D-Sa, Adjustable) : Operating PrincipleDokument4 SeitenOverload Clutches For Index Drives (Type D-Sa, Adjustable) : Operating PrincipleSuhas KODRENoch keine Bewertungen
- Manual Alphaminicourse Compass ComparatorDokument24 SeitenManual Alphaminicourse Compass ComparatorJonson Kiran DcostaNoch keine Bewertungen
- Car 70 SCDokument26 SeitenCar 70 SCafrian syahNoch keine Bewertungen
- 4WNA & 4WFA Winch Operations ManualDokument14 Seiten4WNA & 4WFA Winch Operations Manualsukri arjunaNoch keine Bewertungen
- Installation Instructions Mechanical Gauges/KitsDokument6 SeitenInstallation Instructions Mechanical Gauges/KitsSebastian IgnacioNoch keine Bewertungen
- Electric Water Temperature MANUALDokument6 SeitenElectric Water Temperature MANUALClaro SupplyNoch keine Bewertungen
- Vibscanner FFT GDokument80 SeitenVibscanner FFT GCristhian Garcia Villarroel100% (1)
- DoM Lab Manual - Cycle IDokument37 SeitenDoM Lab Manual - Cycle ITamil SelvanNoch keine Bewertungen
- Delco Radio Owner's Manual Model 633; Delcotron Generator InstallationVon EverandDelco Radio Owner's Manual Model 633; Delcotron Generator InstallationNoch keine Bewertungen
- Delco Manuals: Radio Model 633, Delcotron Generator Delco Radio Owner's Manual Model 633, Delcotron Generator InstallationVon EverandDelco Manuals: Radio Model 633, Delcotron Generator Delco Radio Owner's Manual Model 633, Delcotron Generator InstallationNoch keine Bewertungen
- QM - CW - SO - G2 - 42 - Eglobe G2 - Windows Startup ProblemsDokument6 SeitenQM - CW - SO - G2 - 42 - Eglobe G2 - Windows Startup Problemsakhil100% (1)
- Brochure Marine Solutions 2015Dokument200 SeitenBrochure Marine Solutions 2015akhil100% (1)
- Installation Manual For: Dm800 Ecdis G2Dokument67 SeitenInstallation Manual For: Dm800 Ecdis G2akhilNoch keine Bewertungen
- DM800 Hardware User ManualDokument31 SeitenDM800 Hardware User ManualakhilNoch keine Bewertungen
- QM - CW - SO - G2 - 40 - Eglobe G2 - Harddrive System Failed To StartDokument10 SeitenQM - CW - SO - G2 - 40 - Eglobe G2 - Harddrive System Failed To StartakhilNoch keine Bewertungen
- ELTEK Product Catalog MARINE 2011 PDFDokument52 SeitenELTEK Product Catalog MARINE 2011 PDFakhilNoch keine Bewertungen
- Installation of Amosconnect Crew: Written by StratosDokument21 SeitenInstallation of Amosconnect Crew: Written by StratosakhilNoch keine Bewertungen
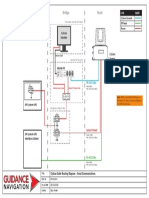
- CyScan Cable Routing Diagram - Serial CommunicationsDokument1 SeiteCyScan Cable Routing Diagram - Serial CommunicationsakhilNoch keine Bewertungen
- 94-0062-4-B - CyScan IV Mounting TemplateDokument2 Seiten94-0062-4-B - CyScan IV Mounting TemplateakhilNoch keine Bewertungen
- 94-0120-4 - CyScan IV Install Sheet - Serial DP, Serial Console (3 Gland)Dokument2 Seiten94-0120-4 - CyScan IV Install Sheet - Serial DP, Serial Console (3 Gland)akhilNoch keine Bewertungen
- OMC-139 Marine Wind Display: FeaturesDokument2 SeitenOMC-139 Marine Wind Display: FeaturesakhilNoch keine Bewertungen
- Meteorological Instruments: MODEL 85000Dokument16 SeitenMeteorological Instruments: MODEL 85000akhilNoch keine Bewertungen
- JAX-9B JAX-9B: Instruction Instruction Manual ManualDokument82 SeitenJAX-9B JAX-9B: Instruction Instruction Manual ManualakhilNoch keine Bewertungen
- JAX-9B JAX-9B: Instruction Manual Instruction ManualDokument82 SeitenJAX-9B JAX-9B: Instruction Manual Instruction ManualakhilNoch keine Bewertungen
- JAX-9B JAX-9B: Service Manual Service ManualDokument56 SeitenJAX-9B JAX-9B: Service Manual Service ManualakhilNoch keine Bewertungen
- JAX-9B JAX-9B: Service Manual Service ManualDokument80 SeitenJAX-9B JAX-9B: Service Manual Service ManualakhilNoch keine Bewertungen
- JAX-9B JAX-9B: Service Manual Service ManualDokument82 SeitenJAX-9B JAX-9B: Service Manual Service ManualakhilNoch keine Bewertungen
- 85106-90 (E) (1) Young AnemometerDokument16 Seiten85106-90 (E) (1) Young AnemometerakhilNoch keine Bewertungen
- OMC-160 Wind Speed & Direction Sensor: FeaturesDokument2 SeitenOMC-160 Wind Speed & Direction Sensor: FeaturesakhilNoch keine Bewertungen
- MODEL 41342VC/VF: Platinum Temperature Probe 0-1V Output Instruction Sheet 41342V-90Dokument2 SeitenMODEL 41342VC/VF: Platinum Temperature Probe 0-1V Output Instruction Sheet 41342V-90akhilNoch keine Bewertungen
- WISKA clientCMS MANUAL EN v3Dokument54 SeitenWISKA clientCMS MANUAL EN v3akhilNoch keine Bewertungen
- GARMIN Chartplotter 7412xsv OMDokument60 SeitenGARMIN Chartplotter 7412xsv OMakhilNoch keine Bewertungen
- DVR Fast Operation User Manual V3.1Dokument107 SeitenDVR Fast Operation User Manual V3.1akhilNoch keine Bewertungen
- Garmin Chartplotter 7412XSVDokument6 SeitenGarmin Chartplotter 7412XSVakhilNoch keine Bewertungen
- Ais Tester Manual EngDokument2 SeitenAis Tester Manual EngakhilNoch keine Bewertungen
- Python Melli Bank - IrDokument10 SeitenPython Melli Bank - IrnafasNoch keine Bewertungen
- Mitigation and Control of Defeating Jammers Using P-1 FactorizationDokument7 SeitenMitigation and Control of Defeating Jammers Using P-1 FactorizationijcnesNoch keine Bewertungen
- Multiplexing LED Drive and A 4x4 Keypad SamplingDokument25 SeitenMultiplexing LED Drive and A 4x4 Keypad SamplingKathleen GonzagaNoch keine Bewertungen
- Rational Unified ProcessDokument40 SeitenRational Unified ProcessNitesh INoch keine Bewertungen
- Sketchup To Photoshop ExerciseDokument2 SeitenSketchup To Photoshop ExerciseEmilyDeGuzmanNoch keine Bewertungen
- CD RomDokument4 SeitenCD RomViraj BahiraNoch keine Bewertungen
- Inventory Management Unit IIDokument42 SeitenInventory Management Unit IIMUDITSAHANINoch keine Bewertungen
- Como Convencer Alguem em 90 Seg - Nicholas BoothmanDokument482 SeitenComo Convencer Alguem em 90 Seg - Nicholas BoothmanLuiz Antonio MeloNoch keine Bewertungen
- Final Proposal EditedDokument34 SeitenFinal Proposal Editedshankar bcNoch keine Bewertungen
- CordicDokument21 SeitenCordic2015mdaamir2015Noch keine Bewertungen
- Regular Expression - Wik..., The Free Encyclopedia PDFDokument9 SeitenRegular Expression - Wik..., The Free Encyclopedia PDFPranav IweNoch keine Bewertungen
- UA5000 NB ExampleDokument7 SeitenUA5000 NB ExampleMansourr AliNoch keine Bewertungen
- Document GenerationDokument5 SeitenDocument Generationben jerryNoch keine Bewertungen
- Performance Appraisal of Google EmployeesDokument22 SeitenPerformance Appraisal of Google EmployeesbhagyaNoch keine Bewertungen
- MIS Structure Based On Physical ComponentsDokument2 SeitenMIS Structure Based On Physical ComponentsSonia LawsonNoch keine Bewertungen
- Coordinate Systems Hotfix ReadmeDokument12 SeitenCoordinate Systems Hotfix ReadmebaoloilongNoch keine Bewertungen
- Tutorial 3Dokument12 SeitenTutorial 3AmmarNoch keine Bewertungen
- Lecture - 2 Classification (Machine Learning Basic and KNN)Dokument94 SeitenLecture - 2 Classification (Machine Learning Basic and KNN)Dawit WoldemichaelNoch keine Bewertungen
- Numerical Methods Using Python: (MCSC-202)Dokument33 SeitenNumerical Methods Using Python: (MCSC-202)SANJEEV KUMAR KHATRINoch keine Bewertungen
- Brand StandardsDokument33 SeitenBrand StandardsHector MatiasNoch keine Bewertungen
- Tso-E ClistDokument222 SeitenTso-E ClistAman Deep Singh100% (1)
- Material Selection ProcessDokument10 SeitenMaterial Selection ProcessLouie GresulaNoch keine Bewertungen
- Yolov5 Based Visual Localization For Autonomous Vehicles: Wided Souidene Mseddi Mohamed Ali Sedrine Rabah AttiaDokument5 SeitenYolov5 Based Visual Localization For Autonomous Vehicles: Wided Souidene Mseddi Mohamed Ali Sedrine Rabah AttiaEd swertNoch keine Bewertungen
- Graduate Aptitude Test in Engineering (Gate)Dokument33 SeitenGraduate Aptitude Test in Engineering (Gate)api-26368914100% (1)
- BitDefender Log FileDokument3 SeitenBitDefender Log FileYulistio ErvanoNoch keine Bewertungen
- BodyGuard I-Tag For Forklift Trucks Rev 2.6Dokument11 SeitenBodyGuard I-Tag For Forklift Trucks Rev 2.6songpengyuan123Noch keine Bewertungen
- Trans - Jour Edited 11Dokument5 SeitenTrans - Jour Edited 11Sri VidyaNoch keine Bewertungen