Das könnte Ihnen auch gefallen
- L3-4 Heat Transfer 2023Dokument21 SeitenL3-4 Heat Transfer 2023TurzaNoch keine Bewertungen
- ME 5129 - Principles of Thermal Energy Conversion: Review of Thermodynamics, Fluid Flow and Heat TransferDokument28 SeitenME 5129 - Principles of Thermal Energy Conversion: Review of Thermodynamics, Fluid Flow and Heat TransferAnandNoch keine Bewertungen
- CHEN 3001 Transport Phenomena: Week 5: Lecture 1 Basic ConceptsDokument50 SeitenCHEN 3001 Transport Phenomena: Week 5: Lecture 1 Basic ConceptsRashveenaNoch keine Bewertungen
- Chapter 02 Heat Conduction EquationDokument9 SeitenChapter 02 Heat Conduction EquationMohsen Khandan BakavoliNoch keine Bewertungen
- 2 Lectures Me315 071 Chapter 3Dokument22 Seiten2 Lectures Me315 071 Chapter 3Pathan KingNoch keine Bewertungen
- 02A - Chapter 2 Black TextDokument16 Seiten02A - Chapter 2 Black TextInwoo ParkNoch keine Bewertungen
- 2A Chapter2 Color PDFDokument18 Seiten2A Chapter2 Color PDFhaziqsajjadNoch keine Bewertungen
- Week 2Dokument70 SeitenWeek 2HammadNoch keine Bewertungen
- Heat Diffusion EquationDokument8 SeitenHeat Diffusion EquationaviralNoch keine Bewertungen
- Chapter 2 One-Dimensional Diffusion ProblemsDokument7 SeitenChapter 2 One-Dimensional Diffusion Problemskelvin felix garciaNoch keine Bewertungen
- Fourier's Law and The Heat Equation: Chapter TwoDokument18 SeitenFourier's Law and The Heat Equation: Chapter TwoBurpingHippoNoch keine Bewertungen
- Topic 2 One Dimensional Transport Heat Transfer (KKPK2443)Dokument47 SeitenTopic 2 One Dimensional Transport Heat Transfer (KKPK2443)NUR ADILAH BINTI MOHAMADNoch keine Bewertungen
- 2 - Heat Conduction - 10012020Dokument71 Seiten2 - Heat Conduction - 10012020Deepak ArjariyaNoch keine Bewertungen
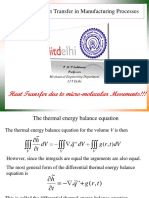
- Heat Transfer Due To Micro-Molecular Movements!!!Dokument11 SeitenHeat Transfer Due To Micro-Molecular Movements!!!Muket AgmasNoch keine Bewertungen
- National Institute of Technology Karnataka Surathkal: Mechanical Behaviour of Engineering Materials (DP702)Dokument34 SeitenNational Institute of Technology Karnataka Surathkal: Mechanical Behaviour of Engineering Materials (DP702)Chetan HcNoch keine Bewertungen
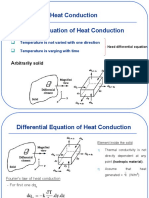
- Heat Conduction Differential Equation of Heat Conduction: Rbitrarily SolidDokument15 SeitenHeat Conduction Differential Equation of Heat Conduction: Rbitrarily SolidUllia Nurul IsmalaNoch keine Bewertungen
- 1-D Steady-State ConductionDokument11 Seiten1-D Steady-State ConductionSeemeer SahuNoch keine Bewertungen
- HMT Unit 1Dokument33 SeitenHMT Unit 1Muthuvel MNoch keine Bewertungen
- Heat Transfer Through Composite Wall: Iii Sem/Basic Mechanical Engineering/Dr.R.Sudhakaran 1/3Dokument32 SeitenHeat Transfer Through Composite Wall: Iii Sem/Basic Mechanical Engineering/Dr.R.Sudhakaran 1/3Narayanan SubramanianNoch keine Bewertungen
- Equation of Heat ConductionDokument16 SeitenEquation of Heat ConductionansudasinghaNoch keine Bewertungen
- HMTWeek3 1Dokument28 SeitenHMTWeek3 1Husnain AliNoch keine Bewertungen
- Fourier's Law and The Heat Equation: Chapter TwoDokument18 SeitenFourier's Law and The Heat Equation: Chapter TwoAnonymous 3H9KhhDONoch keine Bewertungen
- Course No. ME40107: Air-CondtioningDokument48 SeitenCourse No. ME40107: Air-CondtioningbhalchandrapatilNoch keine Bewertungen
- HW01 SolDokument11 SeitenHW01 Solthehighlife1080100% (1)
- Ch2 HT HeatConductionEquationDokument17 SeitenCh2 HT HeatConductionEquationEde Mehta Wardhana100% (1)
- Week3 A PDFDokument28 SeitenWeek3 A PDFHammadNoch keine Bewertungen
- Me 366 Unit 2Dokument77 SeitenMe 366 Unit 2somenewguyonthewebNoch keine Bewertungen
- Temperature Approach (Temperature Profile in Conduction)Dokument28 SeitenTemperature Approach (Temperature Profile in Conduction)Siew YongNoch keine Bewertungen
- Heat Conduction Differential Equation of Heat Conduction: Rbitrarily SolidDokument31 SeitenHeat Conduction Differential Equation of Heat Conduction: Rbitrarily SolidJoshua StrykrNoch keine Bewertungen
- MEC551 Thermal Engineering MEC551 Thermal Engineering: 2.0 Conduction 2.0 ConductionDokument252 SeitenMEC551 Thermal Engineering MEC551 Thermal Engineering: 2.0 Conduction 2.0 ConductionjojoNoch keine Bewertungen
- ConductionDokument11 SeitenConductionKhennoune WissamNoch keine Bewertungen
- Chapter 3 PDFDokument91 SeitenChapter 3 PDFFebri SSNoch keine Bewertungen
- Formula Sheet (13 Pages) : CHE 314 - Heat Transfer, Final Exam (Fall 2018)Dokument13 SeitenFormula Sheet (13 Pages) : CHE 314 - Heat Transfer, Final Exam (Fall 2018)Akib ImtihanNoch keine Bewertungen
- MEC551 Thermal Engineering MEC551 Thermal Engineering: 2.0 Conduction 2.0 ConductionDokument252 SeitenMEC551 Thermal Engineering MEC551 Thermal Engineering: 2.0 Conduction 2.0 ConductionqistinaNoch keine Bewertungen
- Chapter 3 Lecture 3-Part 2Dokument40 SeitenChapter 3 Lecture 3-Part 2Chee HoeNoch keine Bewertungen
- One - Dimensional, Steady - State Conduction Without Thermal Energy GenerationDokument18 SeitenOne - Dimensional, Steady - State Conduction Without Thermal Energy GenerationSilvio VarricchioNoch keine Bewertungen
- Lecture 4 - Thermal Resistance NetworkDokument14 SeitenLecture 4 - Thermal Resistance Networknatnaelzelalem03Noch keine Bewertungen
- Lec 3Dokument4 SeitenLec 3Anonymous 2BJgxbxJNoch keine Bewertungen
- Heat TransferDokument99 SeitenHeat TransferAnonymous M5wAP86100% (2)
- Seprodthermochapter3ht 110220042722 Phpapp02Dokument194 SeitenSeprodthermochapter3ht 110220042722 Phpapp02sakalidhasavasanNoch keine Bewertungen
- 2 Conduction Heat TransferDokument52 Seiten2 Conduction Heat Transferbirhanu kefieNoch keine Bewertungen
- (2013) Heat Transfer 02MDokument14 Seiten(2013) Heat Transfer 02Mjuliocr79Noch keine Bewertungen
- Insulatin Thickness 1Dokument13 SeitenInsulatin Thickness 1ahmedalishNoch keine Bewertungen
- Chapter 3. One-Dimensional Steady-State Conduction: Eunseop Yeom Esyeom@pusan - Ac.krDokument13 SeitenChapter 3. One-Dimensional Steady-State Conduction: Eunseop Yeom Esyeom@pusan - Ac.krqusayNoch keine Bewertungen
- ConductionDokument17 SeitenConductionMarvin T.Noch keine Bewertungen
- Chapter 2Dokument44 SeitenChapter 2temesgenNoch keine Bewertungen
- CH02 Conduction Sept 9 2017Dokument190 SeitenCH02 Conduction Sept 9 2017KaMaL HaZiqNoch keine Bewertungen
- Fourier's Law and The Heat Equation: Chapter TwoDokument16 SeitenFourier's Law and The Heat Equation: Chapter TwoZAVEN TORTIANNoch keine Bewertungen
- ME - 305 - C - 2 - General Heat Conduction Equation and BC-Jan 2022Dokument42 SeitenME - 305 - C - 2 - General Heat Conduction Equation and BC-Jan 2022CHOWDHURY SAMINoch keine Bewertungen
- Heat Transfer Notes PT 2Dokument8 SeitenHeat Transfer Notes PT 2Biniam AlemuNoch keine Bewertungen
- ME259 Lecture Slides 2Dokument43 SeitenME259 Lecture Slides 2Fan YangNoch keine Bewertungen
- CH02 - Conduction 1 November 2021Dokument272 SeitenCH02 - Conduction 1 November 2021syahirmuhd0211Noch keine Bewertungen
- Fundamentals of Heat TransferDokument51 SeitenFundamentals of Heat TransferSandeep MishraNoch keine Bewertungen
- Transport Processes: - CONDUCTION (Part 2&3)Dokument37 SeitenTransport Processes: - CONDUCTION (Part 2&3)DivyeshNoch keine Bewertungen
- One-Dimensional Heat Conduction EquationDokument22 SeitenOne-Dimensional Heat Conduction EquationRayhan AzimNoch keine Bewertungen
- AccommodationDokument16 SeitenAccommodationHuy HeinekenNoch keine Bewertungen
- Unsteady-State Heat and Mass TransferDokument19 SeitenUnsteady-State Heat and Mass Transfernhalieza1067Noch keine Bewertungen
- Conduction: Diah Susanti, PHDDokument26 SeitenConduction: Diah Susanti, PHDBedry NurhadiNoch keine Bewertungen
- The Spectral Theory of Toeplitz Operators. (AM-99), Volume 99Von EverandThe Spectral Theory of Toeplitz Operators. (AM-99), Volume 99Noch keine Bewertungen
- A Time To Be SilentDokument4 SeitenA Time To Be SilentWilmer AsuncionNoch keine Bewertungen
- April Joy B. Asuncion: Department of EducationDokument44 SeitenApril Joy B. Asuncion: Department of EducationWilmer AsuncionNoch keine Bewertungen
- Certificate of Ordination: Merly T. PariñasDokument2 SeitenCertificate of Ordination: Merly T. PariñasWilmer AsuncionNoch keine Bewertungen
- Dedication Certificate FinalDokument9 SeitenDedication Certificate FinalWilmer AsuncionNoch keine Bewertungen
- Monthly Plan of Activities: Alternative Learning System Cauayan East DistrictDokument3 SeitenMonthly Plan of Activities: Alternative Learning System Cauayan East DistrictWilmer AsuncionNoch keine Bewertungen
- Certificate of Appearance: Linglingay National High SchoolDokument1 SeiteCertificate of Appearance: Linglingay National High SchoolWilmer AsuncionNoch keine Bewertungen
- Advanced Topics in Quantum Field Theory A Lecture Course by Shifman M.Dokument642 SeitenAdvanced Topics in Quantum Field Theory A Lecture Course by Shifman M.Amos chenNoch keine Bewertungen
- Unit I-D - Defects in SolidsDokument16 SeitenUnit I-D - Defects in Solidsjyoti kumariNoch keine Bewertungen
- Solid State Chemistry 13102066Dokument43 SeitenSolid State Chemistry 13102066Loveroop Singh62% (13)
- Generator ExcitationDokument68 SeitenGenerator ExcitationRavish Singh89% (9)
- 9 4Dokument1 Seite9 4Prince QueenoNoch keine Bewertungen
- Mass PointsDokument11 SeitenMass PointsShreyansh VishwakarmaNoch keine Bewertungen
- Dynamics11lecture PDFDokument89 SeitenDynamics11lecture PDFEngra FithreeaNoch keine Bewertungen
- Sec 4 Chem Prelim Paper 1Dokument16 SeitenSec 4 Chem Prelim Paper 1TeckluckyNoch keine Bewertungen
- Power Systems K-NotesDokument36 SeitenPower Systems K-NotesAkashGaurav100% (1)
- 20 Examples of Law of Inertia in Everyday LifeDokument9 Seiten20 Examples of Law of Inertia in Everyday LifePraxiLabsNoch keine Bewertungen
- Sample Data Reflection & RefractionDokument11 SeitenSample Data Reflection & RefractionIssa GrantNoch keine Bewertungen
- BoSoN Sample Paper Class IXDokument8 SeitenBoSoN Sample Paper Class IXNilesh RanaNoch keine Bewertungen
- Gyro Notes For 2ND MateDokument18 SeitenGyro Notes For 2ND MateArchit Bhardwaj100% (1)
- Chapter 1 Functions of Several VariablesDokument78 SeitenChapter 1 Functions of Several VariablesChhaviNoch keine Bewertungen
- Semiconductor Devices-Module-2 PDFDokument53 SeitenSemiconductor Devices-Module-2 PDFShivam KumarNoch keine Bewertungen
- 9701 m17 Ms 22Dokument5 Seiten9701 m17 Ms 22qpalzmNoch keine Bewertungen
- Thermal Conductivity Theory Properties Applications Physics of Solids N LiquidDokument306 SeitenThermal Conductivity Theory Properties Applications Physics of Solids N LiquidTan KIm HAn100% (1)
- Spur Gears Component GeneratorDokument5 SeitenSpur Gears Component Generatormisapera35Noch keine Bewertungen
- Vedantu Neet Ug Material Part 2Dokument41 SeitenVedantu Neet Ug Material Part 2PrateekNoch keine Bewertungen
- The Plane Stress ProblemDokument14 SeitenThe Plane Stress ProblemSaif RahmanNoch keine Bewertungen
- Chemistry of Transition MetalsDokument56 SeitenChemistry of Transition MetalsHamad Mohamad100% (1)
- Numerical Tool For Antenna AnalysisDokument41 SeitenNumerical Tool For Antenna AnalysisThilaga MohanNoch keine Bewertungen
- Unit I - UV-vis Spectroscopy IDokument10 SeitenUnit I - UV-vis Spectroscopy IKrishna Prasath S KNoch keine Bewertungen
- Sedimentation Settling Velocity Column AnalysisDokument11 SeitenSedimentation Settling Velocity Column Analysiss_murugan0250% (2)
- No. 114 December 2003Dokument60 SeitenNo. 114 December 2003European Southern ObservatoryNoch keine Bewertungen
- 2022 SAJC H2 Chem SolutionsDokument36 Seiten2022 SAJC H2 Chem SolutionsBooNoch keine Bewertungen
- Scan 9 Apr 2019 PDFDokument26 SeitenScan 9 Apr 2019 PDFShivam BiswasNoch keine Bewertungen
- Power Plant Chemistry PDFDokument175 SeitenPower Plant Chemistry PDFak_thimiriNoch keine Bewertungen
- Chemistry Ncert NotesDokument35 SeitenChemistry Ncert Notesvandana dehankarNoch keine Bewertungen
- Magnetic Flow Meters: Law of Electromagnetic Induction. Magmeters Can Detect TheDokument6 SeitenMagnetic Flow Meters: Law of Electromagnetic Induction. Magmeters Can Detect TheMichelle MenciasNoch keine Bewertungen