Das könnte Ihnen auch gefallen
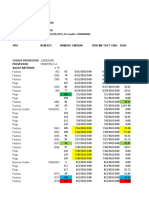
- Tipo Num Doc Numero Emision Vencimi Fact Canc DebeDokument6 SeitenTipo Num Doc Numero Emision Vencimi Fact Canc DebeCarlosOlivierNoch keine Bewertungen
- 2 Evalucaion de Ingles Prefijos y Susfijos, Daniela Olivier, Cedula, 28614596, Seccion, 2303 Contaduria PublicaDokument3 Seiten2 Evalucaion de Ingles Prefijos y Susfijos, Daniela Olivier, Cedula, 28614596, Seccion, 2303 Contaduria PublicaCarlosOlivierNoch keine Bewertungen
- Codigo Proveedor Proveedor Numero Fecha Pago Tipo Doc Nro Doc Nro FactDokument6 SeitenCodigo Proveedor Proveedor Numero Fecha Pago Tipo Doc Nro Doc Nro FactCarlosOlivierNoch keine Bewertungen
- Edo Cta VenefemDokument14 SeitenEdo Cta VenefemCarlosOlivierNoch keine Bewertungen
- Codigo Proveedor Proveedor Numero Fecha Pago Tipo Doc Nro Doc Nro FactDokument6 SeitenCodigo Proveedor Proveedor Numero Fecha Pago Tipo Doc Nro Doc Nro FactCarlosOlivierNoch keine Bewertungen
- Certified LSI Engine With IMPCO SPECTRUM System. Fuel - Control System Diagnostics. Offered by Power Solutions, Inc.Dokument56 SeitenCertified LSI Engine With IMPCO SPECTRUM System. Fuel - Control System Diagnostics. Offered by Power Solutions, Inc.CarlosOlivierNoch keine Bewertungen
- Mos Fet Array Sta508A: Electrical Characteristics Absolute Maximum Ratings External DimensionsDokument1 SeiteMos Fet Array Sta508A: Electrical Characteristics Absolute Maximum Ratings External DimensionsCarlosOlivierNoch keine Bewertungen
- ch340g Datasheet PDFDokument6 Seitench340g Datasheet PDFPrasetyoNoch keine Bewertungen
- Paypal User Agreement: About Your AccountDokument90 SeitenPaypal User Agreement: About Your AccountCarlosOlivierNoch keine Bewertungen
- Control Motor BruslessDokument1 SeiteControl Motor BruslessCarlosOlivierNoch keine Bewertungen
- 20MU14Dokument24 Seiten20MU14Philbert TaylorNoch keine Bewertungen
- Tutorial ATmega ScribDokument60 SeitenTutorial ATmega ScribCarlosOlivierNoch keine Bewertungen
- Tip42 Bipolar para ReguladorDokument6 SeitenTip42 Bipolar para ReguladorJair FernandezNoch keine Bewertungen
- N-Channel Low QG Mosfet 30V, 100A, 3.3m: MOS-TECH Semiconductor Co.,LTDDokument9 SeitenN-Channel Low QG Mosfet 30V, 100A, 3.3m: MOS-TECH Semiconductor Co.,LTDAnonymous p1ig0zX6p0Noch keine Bewertungen
- PICkit 2 Schematic PDFDokument2 SeitenPICkit 2 Schematic PDFCarlosOlivier100% (1)
- NE555Dokument14 SeitenNE555api-3720161100% (1)
- Sta509 PDFDokument1 SeiteSta509 PDFlibertyplusNoch keine Bewertungen
- HGTP10N40C1D, Hgtp10n40e1d, HGTP10N50C1D, Hgtp10n50e1dDokument7 SeitenHGTP10N40C1D, Hgtp10n40e1d, HGTP10N50C1D, Hgtp10n50e1dlibertyplusNoch keine Bewertungen
- Mos Fet Array Sta508A: Electrical Characteristics Absolute Maximum Ratings External DimensionsDokument1 SeiteMos Fet Array Sta508A: Electrical Characteristics Absolute Maximum Ratings External DimensionsCarlosOlivierNoch keine Bewertungen
- Ultrahigh-Speed Switching Applications: Package Dimensions FeaturesDokument5 SeitenUltrahigh-Speed Switching Applications: Package Dimensions FeaturesCarlosOlivierNoch keine Bewertungen
- Tutorial ATmega ScribDokument60 SeitenTutorial ATmega ScribCarlosOlivierNoch keine Bewertungen
- Usbtinyisp: Created by Lady AdaDokument96 SeitenUsbtinyisp: Created by Lady AdaCarlosOlivierNoch keine Bewertungen
- TBS1000 Series Digital Storage Oscilloscopes User ManualDokument159 SeitenTBS1000 Series Digital Storage Oscilloscopes User ManualCarlosOlivierNoch keine Bewertungen
- MosfetDokument5 SeitenMosfetlibertyplusNoch keine Bewertungen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (120)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- East West Airlines Output K MeansDokument29 SeitenEast West Airlines Output K MeansSantoshIshkhanNoch keine Bewertungen
- De Thi Thu THPTQG Lan 1 Ma de 253 2020Dokument5 SeitenDe Thi Thu THPTQG Lan 1 Ma de 253 2020Trà My NgôNoch keine Bewertungen
- Greg Driza ResumeDokument1 SeiteGreg Driza ResumeGregoryNoch keine Bewertungen
- Data Analysis For Quantitative ResearchDokument26 SeitenData Analysis For Quantitative ResearchOktaf Brillian KharismaNoch keine Bewertungen
- Free Download Flirting Formula - Attract and Date Women Instantly and EasilyDokument2 SeitenFree Download Flirting Formula - Attract and Date Women Instantly and EasilyabhijeetbishnoiNoch keine Bewertungen
- Dixell XR02CXDokument3 SeitenDixell XR02CXionut ciobanuNoch keine Bewertungen
- Propiñan de Melyor: Javier Martos CarreteroDokument4 SeitenPropiñan de Melyor: Javier Martos CarreteroAlejandro ParinoNoch keine Bewertungen
- 4.4.1.2 - Configure Ip Acls To Mitigate Attacks: TopologyDokument85 Seiten4.4.1.2 - Configure Ip Acls To Mitigate Attacks: TopologyCamylytho GonzalezNoch keine Bewertungen
- Introduction To CybersecurityDokument46 SeitenIntroduction To CybersecurityDevansh JainNoch keine Bewertungen
- A Dynamic Route Guidance System Based On Real Traffic Data 2001 European Journal of Operational ResearchDokument7 SeitenA Dynamic Route Guidance System Based On Real Traffic Data 2001 European Journal of Operational ResearchMarcoLuisDoradoPinedaNoch keine Bewertungen
- Syllabus MCA PythonDokument2 SeitenSyllabus MCA PythonSudha MadhuriNoch keine Bewertungen
- Jenkins Interview Questions and Answers For Experienced PDFDokument5 SeitenJenkins Interview Questions and Answers For Experienced PDFDvl PravallikaNoch keine Bewertungen
- User Manual (89v51rd2)Dokument4 SeitenUser Manual (89v51rd2)rahul_kumbhar05Noch keine Bewertungen
- A 266 Erpsap Ivt PDFDokument25 SeitenA 266 Erpsap Ivt PDFlastrajNoch keine Bewertungen
- Ee Ac9 Logic Circuits and Switching Theory: Module 1 - (Part 2)Dokument16 SeitenEe Ac9 Logic Circuits and Switching Theory: Module 1 - (Part 2)Josh'z LlamesNoch keine Bewertungen
- A Brief Overview of Maps: A Powerful Way To Represent Your DataDokument125 SeitenA Brief Overview of Maps: A Powerful Way To Represent Your DataClement AileNoch keine Bewertungen
- Reflection English For Oral Communication (Tan Hui Xin)Dokument5 SeitenReflection English For Oral Communication (Tan Hui Xin)千里行Noch keine Bewertungen
- Items of Cadastral Computations in The Pblis of KCSC: Prof. Byung-Guk KIM, Kwang-Seok KWON and Donghoon JEONG, KoreaDokument11 SeitenItems of Cadastral Computations in The Pblis of KCSC: Prof. Byung-Guk KIM, Kwang-Seok KWON and Donghoon JEONG, KoreaAlex NkurunzizaNoch keine Bewertungen
- Ds Checklist Best Practices Int en ActiveDokument2 SeitenDs Checklist Best Practices Int en ActiveIsyanul RiwaldiNoch keine Bewertungen
- 001 Bizgram Asia Pricelist December 23ZDokument15 Seiten001 Bizgram Asia Pricelist December 23ZBizgram AsiaNoch keine Bewertungen
- PWC Healthcare ReportDokument13 SeitenPWC Healthcare ReportDark KnightNoch keine Bewertungen
- Book Chapter 1-MergedDokument11 SeitenBook Chapter 1-MergedGayathri R HICET CSE STAFFNoch keine Bewertungen
- Data Science RoadmapDokument8 SeitenData Science Roadmapshiza asgharNoch keine Bewertungen
- Unit 5 Modern Surveying EquipmentDokument20 SeitenUnit 5 Modern Surveying Equipment121915501016 gitamNoch keine Bewertungen
- Kaspersky Anti Targeted Attack DatasheetDokument2 SeitenKaspersky Anti Targeted Attack DatasheetAngga Khalifah TsauqiNoch keine Bewertungen
- Ghoul Script Modificado.Dokument11 SeitenGhoul Script Modificado.Kitsuney aNoch keine Bewertungen
- Allplan 2014 SBS SysadmNetworkDokument157 SeitenAllplan 2014 SBS SysadmNetworkcan canNoch keine Bewertungen
- TFT 2.8 - QuickGuide - Guia Rapida - Guide RapideDokument4 SeitenTFT 2.8 - QuickGuide - Guia Rapida - Guide RapidegianfrancoNoch keine Bewertungen
- Applied Biosystems 3500 Genetic Analyzer User Manual 1 150Dokument150 SeitenApplied Biosystems 3500 Genetic Analyzer User Manual 1 150Bruno DíazNoch keine Bewertungen
- 10 21597-Jist 803291-1320895Dokument16 Seiten10 21597-Jist 803291-1320895Kazem QarebeiglooNoch keine Bewertungen