Das könnte Ihnen auch gefallen
- ACB Nodo Vial Sendero-Barrag NDokument44 SeitenACB Nodo Vial Sendero-Barrag NAlfredo Gonzalez100% (1)
- Actividad 11 - Pauta - Análisis Cuantitativo IDokument3 SeitenActividad 11 - Pauta - Análisis Cuantitativo ILuis Zuniga100% (1)
- Protocolo de SedaciónDokument1 SeiteProtocolo de SedaciónCamila Rocio Vasquez HernandezNoch keine Bewertungen
- Aspectos MayoresDokument188 SeitenAspectos MayoresAstral Eleusino100% (1)
- Examen Final Curso Procesamiento de DatosDokument7 SeitenExamen Final Curso Procesamiento de DatosDaniel Castro MoralesNoch keine Bewertungen
- Electronica DigitalDokument2 SeitenElectronica DigitalJhon Jairo Jimenez RoseroNoch keine Bewertungen
- Piramides PoblacionalesDokument2 SeitenPiramides PoblacionalesHectorNoch keine Bewertungen
- 03 Marcha AleatoriaDokument11 Seiten03 Marcha AleatoriaAlondra Villesca BarreraNoch keine Bewertungen
- N Pry Car 10 01 004 13 PDFDokument7 SeitenN Pry Car 10 01 004 13 PDFLUIS FERNANDO CABRERANoch keine Bewertungen
- Teoría Del Error y Estimación de La Incertidumbre de La MediciónDokument6 SeitenTeoría Del Error y Estimación de La Incertidumbre de La MediciónAdri lopez100% (1)
- Sesion 2 Ichi-8Dokument1 SeiteSesion 2 Ichi-8Roberto HerreraNoch keine Bewertungen
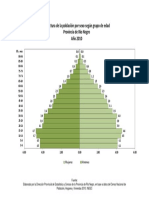
- Pirmide de Poblacin Provincia de Ro Negro Ao 2010Dokument1 SeitePirmide de Poblacin Provincia de Ro Negro Ao 2010Celeste DominguezNoch keine Bewertungen
- 2.1 Ejercicios Extraclase IIDokument2 Seiten2.1 Ejercicios Extraclase IItani.cor.segNoch keine Bewertungen
- Calculo Grado 11° 15-04-24Dokument82 SeitenCalculo Grado 11° 15-04-24Oscar Javier Alvarado AcevedoNoch keine Bewertungen
- Columnas de Agotamiento PDFDokument5 SeitenColumnas de Agotamiento PDFKaren AduviriNoch keine Bewertungen
- Ejercicios para ExamenDokument2 SeitenEjercicios para Examenjazzy SanNoch keine Bewertungen
- Setup SummaryDokument1 SeiteSetup SummaryDiego LopezNoch keine Bewertungen
- Informe Laboratorio RedoxDokument13 SeitenInforme Laboratorio RedoxWENDY NATHALIA ROJAS ARCENoch keine Bewertungen
- DPRF en Contingencia 2020-05-06 - v2Dokument22 SeitenDPRF en Contingencia 2020-05-06 - v2osvaldo denizNoch keine Bewertungen
- Eval3 aplicacionesNUmericas FabriciobencomoDokument7 SeitenEval3 aplicacionesNUmericas FabriciobencomofabiricioNoch keine Bewertungen
- Presentación OndasDokument4 SeitenPresentación OndasRosa Mei Antón RodriguezNoch keine Bewertungen
- Diagrama de Compresibilidad Generalizada.Dokument3 SeitenDiagrama de Compresibilidad Generalizada.Jose David Serrano CampoverdeNoch keine Bewertungen
- CRECIMIENTOS DEMOGRAFICO EN ELMUDO y PERUDokument5 SeitenCRECIMIENTOS DEMOGRAFICO EN ELMUDO y PERUAldo CarlinNoch keine Bewertungen
- Homework Pendientes de La Recta - XLSX Matematica AplicadaDokument24 SeitenHomework Pendientes de La Recta - XLSX Matematica AplicadaAnto CernaNoch keine Bewertungen
- Tabla 2. y 3 Estudiante 5Dokument3 SeitenTabla 2. y 3 Estudiante 5pattyNoch keine Bewertungen
- Planta Arquitectonica Piso 1Dokument1 SeitePlanta Arquitectonica Piso 1levir alirio avellaneda nossaNoch keine Bewertungen
- Clase Tributación Argentina y LatamDokument33 SeitenClase Tributación Argentina y LatamLucas OrdoñezNoch keine Bewertungen
- Informe EXPERIENCIA 5 (Diodos)Dokument9 SeitenInforme EXPERIENCIA 5 (Diodos)Juan Rafael Gomez QuispeNoch keine Bewertungen
- Act - 1 - Taller Sobre Análisis Unidimensional de DatosDokument7 SeitenAct - 1 - Taller Sobre Análisis Unidimensional de DatosTK ANDINA LTDA - Sede PRINCIPAL Bogotá DCNoch keine Bewertungen
- Tabla 3.3 Pendientes Mínimas Por Tipo de TuberíaDokument1 SeiteTabla 3.3 Pendientes Mínimas Por Tipo de TuberíaFernando DelgadoNoch keine Bewertungen
- CLIMATOLOGÍA Y HIDROLOGÍA Taller ParcialDokument5 SeitenCLIMATOLOGÍA Y HIDROLOGÍA Taller ParcialYOINER DANIEL RODRIGUEZ ORTEGANoch keine Bewertungen
- Ejercicio 12.8 Anil Chopra-PpDokument3 SeitenEjercicio 12.8 Anil Chopra-PpLuis TorresNoch keine Bewertungen
- Practica Plano Metrado Cargas IdealizaciónDokument11 SeitenPractica Plano Metrado Cargas IdealizaciónandresosorioNoch keine Bewertungen
- Potencial Hidrico de Un Tejido VegetalDokument4 SeitenPotencial Hidrico de Un Tejido VegetalDidier Penaranda LisundiaNoch keine Bewertungen
- Brice o Edgardo U3T2a11 PDFDokument9 SeitenBrice o Edgardo U3T2a11 PDFsthela leivaNoch keine Bewertungen
- Informe Nº 36 (1) - EMS Ampliacion Outlet Vià A Del Mar - RENTAS OUTLET VI...Dokument68 SeitenInforme Nº 36 (1) - EMS Ampliacion Outlet Vià A Del Mar - RENTAS OUTLET VI...Hernan MadridNoch keine Bewertungen
- Laboratorio de Medicion de La Constante Inductiva de Tiempo en Un Circuito RLDokument7 SeitenLaboratorio de Medicion de La Constante Inductiva de Tiempo en Un Circuito RLVictor Hair Santacruz MuñozNoch keine Bewertungen
- Coordenadas Relativas y AbsolutasDokument1 SeiteCoordenadas Relativas y Absolutasalexis porras salgadoNoch keine Bewertungen
- Elevacion FrontalDokument1 SeiteElevacion FrontallamusicacontigonubeNoch keine Bewertungen
- Clase FuncionesDokument15 SeitenClase FuncionesValentina De Horta MedinaNoch keine Bewertungen
- Baño YapacaniDokument2 SeitenBaño YapacaniRuben Pedro VegaNoch keine Bewertungen
- Esta Bili DadDokument4 SeitenEsta Bili DadJuan SalazarNoch keine Bewertungen
- Vista de Arriba p2 2Dokument1 SeiteVista de Arriba p2 2lolamunizvilicieNoch keine Bewertungen
- Vista de Arriba p2 4Dokument1 SeiteVista de Arriba p2 4lolamunizvilicieNoch keine Bewertungen
- Vista de Arriba p2 3Dokument1 SeiteVista de Arriba p2 3lolamunizvilicieNoch keine Bewertungen
- Tabla PohlhausenDokument2 SeitenTabla PohlhausenSantiAspreaNoch keine Bewertungen
- HECOOODokument8 SeitenHECOOOHecho colqueNoch keine Bewertungen
- BBVA Infografia Marzo 24Dokument1 SeiteBBVA Infografia Marzo 24Vanesa Monsalve RestrepoNoch keine Bewertungen
- Inflación Marzo 2024Dokument72 SeitenInflación Marzo 2024Jeannie GonzaNoch keine Bewertungen
- MedicionesDokument2 SeitenMedicionesNahuel BariéNoch keine Bewertungen
- Tabla Cruzada Tiempo de EntubacionDokument2 SeitenTabla Cruzada Tiempo de EntubacionMichael GarciaNoch keine Bewertungen
- Primer Corte - 64532Dokument1 SeitePrimer Corte - 64532KarNoch keine Bewertungen
- Techo HernanDokument1 SeiteTecho HernanhernanpakuaNoch keine Bewertungen
- Practica 5 Equipo 7Dokument13 SeitenPractica 5 Equipo 7Gris DotorNoch keine Bewertungen
- Primer Taller Mecánica de Fluidos G7 Bayona-Molano-Torres PDFDokument23 SeitenPrimer Taller Mecánica de Fluidos G7 Bayona-Molano-Torres PDFNicolas Molano BarónNoch keine Bewertungen
- Lineas Equipotenciales.Dokument2 SeitenLineas Equipotenciales.KAREN VIVIANA TROCHEZ ZETTYNoch keine Bewertungen
- Deber 1Dokument10 SeitenDeber 1Camilo PachecoNoch keine Bewertungen
- Eslingas Momento de RupturaDokument2 SeitenEslingas Momento de RupturaLiftmacpe sacNoch keine Bewertungen
- Boletin Construcción Nº01-24Dokument3 SeitenBoletin Construcción Nº01-24lilaliesmollNoch keine Bewertungen
- Planilla Horizontal, Cálculo de PHANTOM y SOMATOTIPODokument18 SeitenPlanilla Horizontal, Cálculo de PHANTOM y SOMATOTIPOjairokadoshNoch keine Bewertungen
- Fundamentos de econometría intermedia: Teoría y aplicacionesVon EverandFundamentos de econometría intermedia: Teoría y aplicacionesNoch keine Bewertungen
- "Los Protocolos de Los Sabios de Sion" Sergei NilusDokument45 Seiten"Los Protocolos de Los Sabios de Sion" Sergei NilusYasmani Osbal Espejo VilaNoch keine Bewertungen
- Test TeledetecciionDokument1 SeiteTest TeledetecciionYasmani Osbal Espejo VilaNoch keine Bewertungen
- ALGEBRADokument64 SeitenALGEBRAYasmani Osbal Espejo VilaNoch keine Bewertungen
- Prefil MonograficoDokument6 SeitenPrefil MonograficoYasmani Osbal Espejo Vila100% (1)
- Proyecto Sig-TurDokument25 SeitenProyecto Sig-TurYasmani Osbal Espejo VilaNoch keine Bewertungen
- Cgps BLPZ ActualDokument2 SeitenCgps BLPZ ActualYasmani Osbal Espejo Vila100% (1)
- Informe Tecnico 01/17: Curso Basico 2017Dokument23 SeitenInforme Tecnico 01/17: Curso Basico 2017Yasmani Osbal Espejo VilaNoch keine Bewertungen
- Materiales CerámicosDokument49 SeitenMateriales CerámicosMuñoz GabrielNoch keine Bewertungen
- Reacciones de Ácidos Carboxílicos y DerivadosDokument8 SeitenReacciones de Ácidos Carboxílicos y DerivadosOsnayder Vilardy VarelaNoch keine Bewertungen
- Socavación, Revestimiento de Electrodos, Penetracion, Inclusiones de Escoria, PorosidadDokument5 SeitenSocavación, Revestimiento de Electrodos, Penetracion, Inclusiones de Escoria, PorosidadJose Miguel DelgadoNoch keine Bewertungen
- El TermometroDokument4 SeitenEl TermometroAramiz Arones ZevallosNoch keine Bewertungen
- Servicio de Aire ComprimidioDokument12 SeitenServicio de Aire ComprimidioMarco Del PinoNoch keine Bewertungen
- Teo Tec MolDokument0 SeitenTeo Tec MolFranco Riffo MamaniNoch keine Bewertungen
- Modelaje Leviator MagneticoDokument8 SeitenModelaje Leviator MagneticoPaul UrjilezNoch keine Bewertungen
- Puente AtirantadoDokument10 SeitenPuente AtirantadoKevin ponce robles100% (1)
- Capítulo 1 Tipos y Propiedades de SuelosDokument45 SeitenCapítulo 1 Tipos y Propiedades de SuelosShadyacNoch keine Bewertungen
- Ja 2006Dokument457 SeitenJa 2006Estefany SanchezNoch keine Bewertungen
- Tabla PeriódicaDokument1 SeiteTabla PeriódicaJuanito DíazNoch keine Bewertungen
- Bioelementos ForestalDokument1 SeiteBioelementos ForestalVivianaRualesDavidNoch keine Bewertungen
- Glosario Multilingue de La Industria Del GLPDokument106 SeitenGlosario Multilingue de La Industria Del GLPagomezyNoch keine Bewertungen
- Práctica 8. Enlaces QuímicosDokument10 SeitenPráctica 8. Enlaces QuímicosJulián Assad Bustillos100% (3)
- BiorremedacionDokument13 SeitenBiorremedacionHenos CatañoNoch keine Bewertungen
- Práctica 5 SecundariaDokument1 SeitePráctica 5 SecundariaGiuliana Churano TinocoNoch keine Bewertungen
- Estado Del Agujero de La Capa de Ozono: ESTUDIANTE: Marcelo Larco Meza PROFESOR: Carlos CornelioDokument6 SeitenEstado Del Agujero de La Capa de Ozono: ESTUDIANTE: Marcelo Larco Meza PROFESOR: Carlos CorneliocheloNoch keine Bewertungen
- Tarea de BioDokument5 SeitenTarea de BioDavid MontenegroNoch keine Bewertungen
- Actividad 2. Seguridad e HigieneDokument6 SeitenActividad 2. Seguridad e Higienelorena hernandezNoch keine Bewertungen
- Expociencia DefinitivaDokument17 SeitenExpociencia DefinitivaAlexNoch keine Bewertungen
- Teoria Del CaosDokument21 SeitenTeoria Del CaosJosue Gustavo Hernandez Villa100% (2)
- Calentador SolarDokument15 SeitenCalentador Solaralbeiro rojas avellanedaNoch keine Bewertungen
- Taller Fenómenos OndulatoriosDokument3 SeitenTaller Fenómenos OndulatoriosSebastian AldanaNoch keine Bewertungen
- Cinética Del SecadoDokument2 SeitenCinética Del SecadoJoeline BaldarragoNoch keine Bewertungen
- Cimentaciones ProfundasDokument25 SeitenCimentaciones ProfundasMario Ernesto Del Rio JimenezNoch keine Bewertungen
- NuclearDokument4 SeitenNuclearalman .A.G.ANoch keine Bewertungen
- EutrofizacionDokument16 SeitenEutrofizacionElva DanaeNoch keine Bewertungen
- Ficha Tecnica Acido Nitrico D Yilop-2018Dokument2 SeitenFicha Tecnica Acido Nitrico D Yilop-2018juan florNoch keine Bewertungen
- Informe de Geologia de Identificacion de Rocas en El Laboratorio y Primera VisitaDokument26 SeitenInforme de Geologia de Identificacion de Rocas en El Laboratorio y Primera Visitajhonatanfrank100% (1)