Das könnte Ihnen auch gefallen
- Volvo D16 Engine Family: SpecificationsDokument3 SeitenVolvo D16 Engine Family: SpecificationsJicheng PiaoNoch keine Bewertungen
- Dummies Guide To Writing A SonnetDokument1 SeiteDummies Guide To Writing A Sonnetritafstone2387100% (2)
- Load SheddingDokument32 SeitenLoad SheddingRoger Kyaw Swar Phone MaungNoch keine Bewertungen
- B - VSD - Instrumentation & Control Systems PDFDokument2 SeitenB - VSD - Instrumentation & Control Systems PDFFawaaz KhurwolahNoch keine Bewertungen
- Machine Protection PDFDokument14 SeitenMachine Protection PDFAbdelsalam ElhaffarNoch keine Bewertungen
- 1MRK509045-BEN en Negative Sequence Over Current Relay and Protection Assemblies RXIIK 4 RAIIK 400Dokument12 Seiten1MRK509045-BEN en Negative Sequence Over Current Relay and Protection Assemblies RXIIK 4 RAIIK 400Selvaraj VaithilingamNoch keine Bewertungen
- Knowledge is "Real Power": Introduction to Power QualityVon EverandKnowledge is "Real Power": Introduction to Power QualityNoch keine Bewertungen
- Applying Power System Stabilizers Part III - Practical Considerations PDFDokument13 SeitenApplying Power System Stabilizers Part III - Practical Considerations PDFAshwani GargNoch keine Bewertungen
- Artificial Loading of Induction MotorsDokument6 SeitenArtificial Loading of Induction Motorsamkeew100% (1)
- Abstract On DC Power Supply and BatteriesDokument18 SeitenAbstract On DC Power Supply and Batteriessamad_omidvar629250% (2)
- Monthly Progress Report 20 May 20Dokument25 SeitenMonthly Progress Report 20 May 20SBILALAHMEDNoch keine Bewertungen
- Case Study of The Application in A Large Industrial FacilityDokument10 SeitenCase Study of The Application in A Large Industrial FacilityAndres VergaraNoch keine Bewertungen
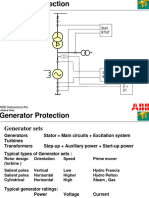
- Generator ProtectionDokument86 SeitenGenerator ProtectionAbhishek RajputNoch keine Bewertungen
- General Excitation SystemDokument58 SeitenGeneral Excitation SystemReza GhasemiNoch keine Bewertungen
- PPT Introduction To Power Electronics (Benny)Dokument8 SeitenPPT Introduction To Power Electronics (Benny)saqibmaqboolNoch keine Bewertungen
- Hypnosis ScriptDokument3 SeitenHypnosis ScriptLuca BaroniNoch keine Bewertungen
- Avr CubicleDokument28 SeitenAvr CubicleJITPLNoch keine Bewertungen
- DIgSILENT PF 15.1.2 ManualDokument1.427 SeitenDIgSILENT PF 15.1.2 Manualxvehicle97% (31)
- DIgSILENT PF 15.1.2 TutorialDokument98 SeitenDIgSILENT PF 15.1.2 Tutorialxvehicle100% (5)
- Ohb Manual SF6 CB ABBDokument35 SeitenOhb Manual SF6 CB ABBkishansaiNoch keine Bewertungen
- GFK2749 - RX3i PSM PDFDokument100 SeitenGFK2749 - RX3i PSM PDFgabsNoch keine Bewertungen
- D.G Size Calculation (1.1.19)Dokument1 SeiteD.G Size Calculation (1.1.19)Krisna Bayu AriyantoNoch keine Bewertungen
- Communication Technologies Augmenting Power TransmissionDokument54 SeitenCommunication Technologies Augmenting Power TransmissionChaitanyaVigNoch keine Bewertungen
- Chapter 5 - Synchronous Generator: The Effect of Load Changes On A Synchronous Generator Operating AloneDokument46 SeitenChapter 5 - Synchronous Generator: The Effect of Load Changes On A Synchronous Generator Operating AloneMuhammad R ShihadehNoch keine Bewertungen
- Tribhuvan UniversityDokument14 SeitenTribhuvan UniversitySudhakar ShresthaNoch keine Bewertungen
- Final Simple Facts SummaryDokument11 SeitenFinal Simple Facts SummaryIhuhwa Marta TauNoch keine Bewertungen
- IEEE Recommended Practice For Exc. Sys Models 5Dokument3 SeitenIEEE Recommended Practice For Exc. Sys Models 5Emmanuel ZamoranoNoch keine Bewertungen
- 19.the STATCOM Intro Principle v-ICharsDokument21 Seiten19.the STATCOM Intro Principle v-ICharsPavan KumarNoch keine Bewertungen
- HVDC and FACTS - PPT PDFDokument19 SeitenHVDC and FACTS - PPT PDFManu KasturiNoch keine Bewertungen
- Kitz 101 102 User ManualDokument36 SeitenKitz 101 102 User ManualMohd Zulfiqar100% (1)
- 02-2 Excitation CourseDokument31 Seiten02-2 Excitation CourseFulki Kautsar S100% (1)
- Microgrids Black StartDokument7 SeitenMicrogrids Black StartLalit ChoudharyNoch keine Bewertungen
- Merus STATCOMDokument8 SeitenMerus STATCOMعبدالله نعمان آلزبيديNoch keine Bewertungen
- MATLAB-Simulink Based Analysis ofDokument4 SeitenMATLAB-Simulink Based Analysis ofAmare KassawNoch keine Bewertungen
- ITC Green Centre: Gurgaon, IndiaDokument19 SeitenITC Green Centre: Gurgaon, IndiaAgastya Dasari100% (2)
- Oral Communication in ContextDokument31 SeitenOral Communication in ContextPrecious Anne Prudenciano100% (1)
- Flyer SYMAP-BC, BCG, X, XG, Y PDFDokument11 SeitenFlyer SYMAP-BC, BCG, X, XG, Y PDFxvehicleNoch keine Bewertungen
- TechRef SynchronousMachineDokument35 SeitenTechRef SynchronousMachinexvehicleNoch keine Bewertungen
- SM008 RevA 2005 Motors and Generators Preventive Maintenance Kits LowresDokument2 SeitenSM008 RevA 2005 Motors and Generators Preventive Maintenance Kits LowresKen VikstromNoch keine Bewertungen
- Synchronous GeneratorsDokument24 SeitenSynchronous GeneratorsSyed Muhammad Munavvar Hussain67% (3)
- VT Guard Pro - Technical ArticleDokument4 SeitenVT Guard Pro - Technical ArticleAdemir DzanicNoch keine Bewertungen
- NANJING REL ManualDokument470 SeitenNANJING REL Manualajeez86Noch keine Bewertungen
- Inomax ACS580 VFD User Manual V220Dokument112 SeitenInomax ACS580 VFD User Manual V220luis castiblanco100% (1)
- A New Method For Online Thyristor Conduction Monitoring Based On Thyristor Current Waveform Recording in Static Excitation SystemDokument6 SeitenA New Method For Online Thyristor Conduction Monitoring Based On Thyristor Current Waveform Recording in Static Excitation SystemR0B0T2013Noch keine Bewertungen
- The Product Life Cycle Support Policy See Life Cycle Overview Is (1) ...Dokument4 SeitenThe Product Life Cycle Support Policy See Life Cycle Overview Is (1) ...Pradeep KumarNoch keine Bewertungen
- Reverse PowerDokument6 SeitenReverse PowerEdward DineshNoch keine Bewertungen
- CCJ - How To Prevent Collector-Ring FiresDokument7 SeitenCCJ - How To Prevent Collector-Ring Firesabdulyunus_amirNoch keine Bewertungen
- DNV Earthing Rule Pag.36Dokument1 SeiteDNV Earthing Rule Pag.36CHOCAMAN1Noch keine Bewertungen
- Unifrom Protection - Philosophy.by NRPCDokument1 SeiteUnifrom Protection - Philosophy.by NRPCsandeepy_27Noch keine Bewertungen
- Siprotec Catalog 7um62Dokument35 SeitenSiprotec Catalog 7um62Eddy Fernando Queca CadizNoch keine Bewertungen
- RLC 1st ManualDokument141 SeitenRLC 1st Manualjaved shaikh chaandNoch keine Bewertungen
- KUVAG Indicating System CPI VI-3P R (10-52kV)Dokument3 SeitenKUVAG Indicating System CPI VI-3P R (10-52kV)registracijus100% (1)
- 7UM62 Catalog SIP E7 PDFDokument36 Seiten7UM62 Catalog SIP E7 PDFu_ulloaNoch keine Bewertungen
- How Is Reactive Power Produced - What Are The Effects of Reactive Power in The Grid - QuoraDokument5 SeitenHow Is Reactive Power Produced - What Are The Effects of Reactive Power in The Grid - QuoraMahesh Kumar BhattaNoch keine Bewertungen
- PCS-9691 - X - Instruction Manual - EN - Overseas General - X - R1.00Dokument290 SeitenPCS-9691 - X - Instruction Manual - EN - Overseas General - X - R1.00ahmadokkyNoch keine Bewertungen
- Over and Under Voltage Relay CharacteriticsDokument24 SeitenOver and Under Voltage Relay CharacteriticsKashif RehmanNoch keine Bewertungen
- RC f69 PRC 019 Verificationcoordinationgeneratorcapabilities LimitersprotectionsDokument42 SeitenRC f69 PRC 019 Verificationcoordinationgeneratorcapabilities LimitersprotectionsKaren ValenciaNoch keine Bewertungen
- Differential Bus ProtectionDokument14 SeitenDifferential Bus ProtectionRodriguez Villalobos NelsonNoch keine Bewertungen
- 2017 Simulation of Three-Phase Transformerless Online UPS Using MATLAB-SIMULINK-IJAERDV04I0569640 PDFDokument7 Seiten2017 Simulation of Three-Phase Transformerless Online UPS Using MATLAB-SIMULINK-IJAERDV04I0569640 PDFTài Nguyễn Minh NhậtNoch keine Bewertungen
- Technical Rules For The Assessment of Network Disturbances (HV) 2012Dokument47 SeitenTechnical Rules For The Assessment of Network Disturbances (HV) 2012Fikret VelagicNoch keine Bewertungen
- Raptor User's Manual PDFDokument152 SeitenRaptor User's Manual PDFIchim NasuiNoch keine Bewertungen
- Dhaligaon 132kv ReportDokument24 SeitenDhaligaon 132kv Reportজুবিন বৰ্মণ100% (3)
- Application of Shunt Active Power Filter Full ReportDokument15 SeitenApplication of Shunt Active Power Filter Full ReportShantha KumarNoch keine Bewertungen
- A Virtual Impedance Optimization Method For Reactive Power Sharing in Networked MicrogridDokument15 SeitenA Virtual Impedance Optimization Method For Reactive Power Sharing in Networked Microgridamina bu bakerNoch keine Bewertungen
- A Unified Control Strategy For Three-Phase Inverter in Distributed GenerationDokument16 SeitenA Unified Control Strategy For Three-Phase Inverter in Distributed GenerationNguyễn Nhật QuyênNoch keine Bewertungen
- 7 Decentralized Load Sharing in A Low-Voltage Direct Current Microgrid With An Adaptive Droop Approach Based On A Superimposed FrequencyDokument11 Seiten7 Decentralized Load Sharing in A Low-Voltage Direct Current Microgrid With An Adaptive Droop Approach Based On A Superimposed FrequencyShubham PrajapatiNoch keine Bewertungen
- An Enhanced Droop Control Method For Accurate Load Sharing and Voltage Improvement of Isolated and Interconnected DC MicrogridsDokument11 SeitenAn Enhanced Droop Control Method For Accurate Load Sharing and Voltage Improvement of Isolated and Interconnected DC MicrogridsRiad TifaNoch keine Bewertungen
- Strandmon Wing Chair Skiftebo Yellow - AA 2019535 6 - Pub PDFDokument20 SeitenStrandmon Wing Chair Skiftebo Yellow - AA 2019535 6 - Pub PDFxvehicleNoch keine Bewertungen
- dm00104451 Cortexm0 Programming Manual For stm32l0 stm32g0 stm32wl and stm32wb Series Stmicroelectronics PDFDokument110 Seitendm00104451 Cortexm0 Programming Manual For stm32l0 stm32g0 stm32wl and stm32wb Series Stmicroelectronics PDFxvehicleNoch keine Bewertungen
- MB1137 2Dokument6 SeitenMB1137 2xvehicleNoch keine Bewertungen
- dm00104451 Cortexm0 Programming Manual For stm32l0 stm32g0 stm32wl and stm32wb Series Stmicroelectronics PDFDokument110 Seitendm00104451 Cortexm0 Programming Manual For stm32l0 stm32g0 stm32wl and stm32wb Series Stmicroelectronics PDFxvehicleNoch keine Bewertungen
- pm93 95 97 Fluke 93 95 97 PDFDokument267 Seitenpm93 95 97 Fluke 93 95 97 PDFxvehicleNoch keine Bewertungen
- TEOS+ Product - Gallery - 2019-08-28 - 09-28-03Dokument22 SeitenTEOS+ Product - Gallery - 2019-08-28 - 09-28-03xvehicleNoch keine Bewertungen
- Fiber Optic Ieee c37.94 g.703 E1 Multiplexer pdf2 133 PDFDokument18 SeitenFiber Optic Ieee c37.94 g.703 E1 Multiplexer pdf2 133 PDFxvehicleNoch keine Bewertungen
- Ref 630Dokument84 SeitenRef 630MarkoNoch keine Bewertungen
- Floc Fault Locator: Issued: 6/2005 Version: A/08.07.2005Dokument35 SeitenFloc Fault Locator: Issued: 6/2005 Version: A/08.07.2005xvehicleNoch keine Bewertungen
- Infineon-Application Power Conversion Power Factor Correction (PFC) With XMC-TR-V01 00-EnDokument36 SeitenInfineon-Application Power Conversion Power Factor Correction (PFC) With XMC-TR-V01 00-EnxvehicleNoch keine Bewertungen
- Stmicroelectronics: ™ Nucleo/Discovery/Eval Boards: St-Link/V2 andDokument24 SeitenStmicroelectronics: ™ Nucleo/Discovery/Eval Boards: St-Link/V2 andHyung Chan KimNoch keine Bewertungen
- LM2901 PDFDokument19 SeitenLM2901 PDFFabio JuniorNoch keine Bewertungen
- 91070Dokument9 Seiten91070atomdNoch keine Bewertungen
- C14 EQS 62 03 BMR 5 2 Continuity of Supply 20150127Dokument54 SeitenC14 EQS 62 03 BMR 5 2 Continuity of Supply 20150127xvehicleNoch keine Bewertungen
- Trần Phương Mai - Literature - Irony in "Letter to a Funeral Parlor" by Lydia DavisDokument2 SeitenTrần Phương Mai - Literature - Irony in "Letter to a Funeral Parlor" by Lydia DavisTrần Phương MaiNoch keine Bewertungen
- Language Analysis - GRAMMAR/FUNCTIONS Context Anticipated ProblemsDokument2 SeitenLanguage Analysis - GRAMMAR/FUNCTIONS Context Anticipated Problemsshru_edgyNoch keine Bewertungen
- Churches That Have Left RCCG 0722 PDFDokument2 SeitenChurches That Have Left RCCG 0722 PDFKadiri JohnNoch keine Bewertungen
- Ain Tsila Development Main EPC Contract A-CNT-CON-000-00282: Visual Inspection Test Procedure B-QAC-PRO-210-39162Dokument14 SeitenAin Tsila Development Main EPC Contract A-CNT-CON-000-00282: Visual Inspection Test Procedure B-QAC-PRO-210-39162ZaidiNoch keine Bewertungen
- Genomics - FAODokument184 SeitenGenomics - FAODennis AdjeiNoch keine Bewertungen
- Berrinba East State School OSHC Final ITO For Schools Final 2016Dokument24 SeitenBerrinba East State School OSHC Final ITO For Schools Final 2016hieuntx93Noch keine Bewertungen
- Transfer Pricing 8Dokument34 SeitenTransfer Pricing 8nigam_miniNoch keine Bewertungen
- Chapter 15 (Partnerships Formation, Operation and Ownership Changes) PDFDokument58 SeitenChapter 15 (Partnerships Formation, Operation and Ownership Changes) PDFAbdul Rahman SholehNoch keine Bewertungen
- Samsung LE26A457Dokument64 SeitenSamsung LE26A457logik.huNoch keine Bewertungen
- APA CitationsDokument9 SeitenAPA CitationsIslamNoch keine Bewertungen
- Skype OptionsDokument2 SeitenSkype OptionsacidwillNoch keine Bewertungen
- Final ReflectionDokument4 SeitenFinal Reflectionapi-314231777Noch keine Bewertungen
- Understanding SIP RE-INVITEDokument6 SeitenUnderstanding SIP RE-INVITESK_shivamNoch keine Bewertungen
- Roman Roads in Southeast Wales Year 3Dokument81 SeitenRoman Roads in Southeast Wales Year 3The Glamorgan-Gwent Archaeological Trust LtdNoch keine Bewertungen
- First Aid General PathologyDokument8 SeitenFirst Aid General PathologyHamza AshrafNoch keine Bewertungen
- MPU Self Reflection Peer ReviewDokument3 SeitenMPU Self Reflection Peer ReviewysaNoch keine Bewertungen
- Mooting ExampleDokument35 SeitenMooting Exampleluziro tenNoch keine Bewertungen
- 40+ Cool Good Vibes MessagesDokument10 Seiten40+ Cool Good Vibes MessagesRomeo Dela CruzNoch keine Bewertungen
- Principles of Communication PlanDokument2 SeitenPrinciples of Communication PlanRev Richmon De ChavezNoch keine Bewertungen
- Gastric Emptying PresentationDokument8 SeitenGastric Emptying Presentationrahul2kNoch keine Bewertungen
- QTP Common FunctionsDokument55 SeitenQTP Common FunctionsAnkur TiwariNoch keine Bewertungen
- De Luyen Thi Vao Lop 10 Mon Tieng Anh Nam Hoc 2019Dokument106 SeitenDe Luyen Thi Vao Lop 10 Mon Tieng Anh Nam Hoc 2019Mai PhanNoch keine Bewertungen
- KBC Autumn Regatta 2023 Saturday Race ScheduleDokument2 SeitenKBC Autumn Regatta 2023 Saturday Race SchedulezainNoch keine Bewertungen
- GE 110HP DC Trolley MotorDokument10 SeitenGE 110HP DC Trolley MotorAnthony PetersNoch keine Bewertungen
- Security Questions in UPSC Mains GS 3 2013 2020Dokument3 SeitenSecurity Questions in UPSC Mains GS 3 2013 2020gangadhar ruttalaNoch keine Bewertungen