Das könnte Ihnen auch gefallen
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (119)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (587)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2219)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (894)
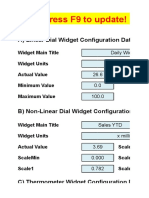
- Excel Dashboard WidgetsDokument47 SeitenExcel Dashboard WidgetskhincowNoch keine Bewertungen
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- System Engineering Management Plan (SEMPDokument2 SeitenSystem Engineering Management Plan (SEMPKatie WestNoch keine Bewertungen
- Write Like An Academic: Designing An Online Advanced Writing Course For Postgraduate Students and ResearchersDokument9 SeitenWrite Like An Academic: Designing An Online Advanced Writing Course For Postgraduate Students and ResearchersLexi TronicsNoch keine Bewertungen
- Understand Centrifugal CompressorDokument16 SeitenUnderstand Centrifugal Compressorramanathan72-1100% (2)
- Gpa 2145Dokument15 SeitenGpa 2145Sergio David Ruiz100% (1)
- Report On Corporate Communication Strategy Analysis ofDokument38 SeitenReport On Corporate Communication Strategy Analysis ofNAFISA ISLAMNoch keine Bewertungen
- 12 Fa02Dokument4 Seiten12 Fa02corsovaNoch keine Bewertungen
- Method of MomentsDokument114 SeitenMethod of MomentsankladhaNoch keine Bewertungen
- Sample Style GuideDokument5 SeitenSample Style Guideapi-282547722Noch keine Bewertungen
- Pivot Part NumDokument2 SeitenPivot Part Numrossini_danielNoch keine Bewertungen
- The Top 200 International Design Firms - ENR - Engineering News Record - McGraw-Hill ConstructionDokument4 SeitenThe Top 200 International Design Firms - ENR - Engineering News Record - McGraw-Hill ConstructiontarekhocineNoch keine Bewertungen
- How To Unbrick AT&T Galaxy S5 SM-G900A Soft-Brick Fix & Restore To Stock Firmware Guide - GalaxyS5UpdateDokument21 SeitenHow To Unbrick AT&T Galaxy S5 SM-G900A Soft-Brick Fix & Restore To Stock Firmware Guide - GalaxyS5UpdateMarce CJ100% (1)
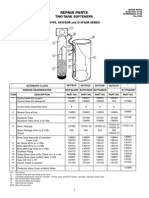
- Star S07FS32DR Water Softener Repair PartsDokument1 SeiteStar S07FS32DR Water Softener Repair PartsBillNoch keine Bewertungen
- GPT 1-15 LineBackerDokument4 SeitenGPT 1-15 LineBackerazadeazNoch keine Bewertungen
- The hyperwall: A multiple display wall for visualizing high-dimensional dataDokument4 SeitenThe hyperwall: A multiple display wall for visualizing high-dimensional dataMahendra PututNoch keine Bewertungen
- Results Part III - Part III-March 2017 - ElectricalDokument3 SeitenResults Part III - Part III-March 2017 - ElectricalTharaka MunasingheNoch keine Bewertungen
- !K Kanji Kaku - StrokesDokument18 Seiten!K Kanji Kaku - StrokeschingkakaNoch keine Bewertungen
- CV Summary for IT Position Seeking Recent GraduateDokument5 SeitenCV Summary for IT Position Seeking Recent Graduateeang barangNoch keine Bewertungen
- PMO ProceduresDokument21 SeitenPMO ProceduresTariq JamalNoch keine Bewertungen
- Nord Motors Manual BookDokument70 SeitenNord Motors Manual Bookadh3ckNoch keine Bewertungen
- Template Icme 13 PosterDokument1 SeiteTemplate Icme 13 PosterZulma Xiomara Rueda GarciaNoch keine Bewertungen
- Schedule of Rates 2011 Rev1Dokument144 SeitenSchedule of Rates 2011 Rev1Screen BiruNoch keine Bewertungen
- Types of Commercial CellDokument4 SeitenTypes of Commercial CellDaveNoch keine Bewertungen
- DSSSB 01 2017Dokument9 SeitenDSSSB 01 2017Praneeta KatdareNoch keine Bewertungen
- Letter To Local Residents From Sutton Council Re. Lidl Development To Replace Matalan Ref DM2019-02113 10 January 2020Dokument5 SeitenLetter To Local Residents From Sutton Council Re. Lidl Development To Replace Matalan Ref DM2019-02113 10 January 2020etajohnNoch keine Bewertungen
- Panasonic WJ FS616Dokument62 SeitenPanasonic WJ FS616triliteNoch keine Bewertungen
- 13-2021مواصفات الفنية لقطع غيار المكيفاتDokument4 Seiten13-2021مواصفات الفنية لقطع غيار المكيفاتTawfeeq Al-HababbiNoch keine Bewertungen
- UFED Solutions Brochure WebDokument4 SeitenUFED Solutions Brochure Webwilly irawanNoch keine Bewertungen
- Mobil Pegasus™ 1100 Series Mobil Pegasus™ 1100 Series Mobil Pegasus™ 1100 Series Mobil Pegasus™ 1100 SeriesDokument3 SeitenMobil Pegasus™ 1100 Series Mobil Pegasus™ 1100 Series Mobil Pegasus™ 1100 Series Mobil Pegasus™ 1100 SeriesMudabbir Shan AhmedNoch keine Bewertungen
- Touch Screen TechnologyDokument18 SeitenTouch Screen TechnologySmîlērNoch keine Bewertungen