Das könnte Ihnen auch gefallen
- Motor Protection PrinciplesDokument53 SeitenMotor Protection PrinciplesGITAM UNIVERISTYNoch keine Bewertungen
- Motor Protection PrinciplesDokument35 SeitenMotor Protection PrinciplesTrầnThanhTrungNoch keine Bewertungen
- Protection Motor TutorialDokument35 SeitenProtection Motor Tutorialahmadshoeb19Noch keine Bewertungen
- Motor Protection SeminarDokument73 SeitenMotor Protection SeminarKashinath PscNoch keine Bewertungen
- Fundamentals of A Motor Thermal Model and Its Applications in Motor ProtectionDokument15 SeitenFundamentals of A Motor Thermal Model and Its Applications in Motor Protectionnokdiego100% (1)
- Motor Thermal ModelDokument15 SeitenMotor Thermal ModelnagarajasarmaNoch keine Bewertungen
- Bajaj PresentationDokument37 SeitenBajaj PresentationAmanuel BerhaneNoch keine Bewertungen
- Root Cause Analysis For Wind GeneratorsDokument29 SeitenRoot Cause Analysis For Wind GeneratorsFabio PelleritoNoch keine Bewertungen
- SIEMENS App-Man-Section10-Rev1 PDFDokument37 SeitenSIEMENS App-Man-Section10-Rev1 PDFAlexis Pernía SilvaNoch keine Bewertungen
- Harmonics & Power QualityDokument2 SeitenHarmonics & Power Qualityhicham boutoucheNoch keine Bewertungen
- TribologiaDokument40 SeitenTribologiaKevin Diaz NoriegaNoch keine Bewertungen
- Cii Ped 2020 r11Dokument39 SeitenCii Ped 2020 r11S BNoch keine Bewertungen
- Introduction To TXpert Ecosystem-EnDokument47 SeitenIntroduction To TXpert Ecosystem-EnBrunophb2012Noch keine Bewertungen
- 2KJ3003-1JR23-4AA1-Z D05+G34+G47+K01+K06+L02+L75+M63 Datasheet enDokument1 Seite2KJ3003-1JR23-4AA1-Z D05+G34+G47+K01+K06+L02+L75+M63 Datasheet enpete20r2Noch keine Bewertungen
- M EPOCKETENf PDFDokument41 SeitenM EPOCKETENf PDFGuilherme GuimarãesNoch keine Bewertungen
- SI Outage Report - December 2017Dokument10 SeitenSI Outage Report - December 2017Lindon ManehetaNoch keine Bewertungen
- Visual Inspection of Large Electric GeneratorsDokument28 SeitenVisual Inspection of Large Electric Generatorsemailsepamku gorgomNoch keine Bewertungen
- 8-1. Hydraulic Breaker and Quick ClampDokument11 Seiten8-1. Hydraulic Breaker and Quick ClampGetachew GechNoch keine Bewertungen
- Failure Rate Analysis of Power Circuit Breaker in High Voltage SubstationDokument6 SeitenFailure Rate Analysis of Power Circuit Breaker in High Voltage SubstationSing Yew LamNoch keine Bewertungen
- Verification and Technical Assessment Protocol YanmarDokument2 SeitenVerification and Technical Assessment Protocol YanmarMaryan LacatusNoch keine Bewertungen
- Aaaaaa Electrical Generators and Excitation Systems TOKOLOGO MOTORS MPUMALANGADokument7 SeitenAaaaaa Electrical Generators and Excitation Systems TOKOLOGO MOTORS MPUMALANGAcraig pretoriusNoch keine Bewertungen
- GT Blade Vibrations Basics - Excellent ReadDokument11 SeitenGT Blade Vibrations Basics - Excellent ReadMehulkumar Patel100% (2)
- 07.elec Weekly Report 12.06.2023 To 18.06.2023Dokument4 Seiten07.elec Weekly Report 12.06.2023 To 18.06.2023Manohar Paul Praveen MNoch keine Bewertungen
- ManualDokument32 SeitenManualJózsef VinnaiNoch keine Bewertungen
- Generator Diagnostics Based On 100 Failure Modes Csaba IRMC 2019Dokument22 SeitenGenerator Diagnostics Based On 100 Failure Modes Csaba IRMC 2019Ari BinukoNoch keine Bewertungen
- Imc-Br004 - En-E V IMPDokument12 SeitenImc-Br004 - En-E V IMPSubramanyam Arehalli MuniswariahNoch keine Bewertungen
- Failure Criticality Analysis Using Fishikawa Diagram (A Case Study of Dumpers at Ocp, Ramagundam)Dokument7 SeitenFailure Criticality Analysis Using Fishikawa Diagram (A Case Study of Dumpers at Ocp, Ramagundam)Ashis DasNoch keine Bewertungen
- MIG WeldigDokument92 SeitenMIG WeldigTonluck KaimakNoch keine Bewertungen
- List of Plant & Machinery: Name of The Item Qty Unit Rate Basic Price Plant & Machinery: Oil Ghani and Related PartsDokument11 SeitenList of Plant & Machinery: Name of The Item Qty Unit Rate Basic Price Plant & Machinery: Oil Ghani and Related PartsAbhishek Kumar RaiNoch keine Bewertungen
- Rotating Machines Testing and Monitoring Brochure ENU PDFDokument28 SeitenRotating Machines Testing and Monitoring Brochure ENU PDFmunggangNoch keine Bewertungen
- Asset Management Solutions - ThomasDokument44 SeitenAsset Management Solutions - Thomassajeevi piumikaNoch keine Bewertungen
- Industrial Oils Condition MonitoringDokument29 SeitenIndustrial Oils Condition Monitoringf2h52svrbmNoch keine Bewertungen
- SECTION 1.20: SpecificationsDokument26 SeitenSECTION 1.20: SpecificationsLUISA FERNANDA TORRES MANOSALVANoch keine Bewertungen
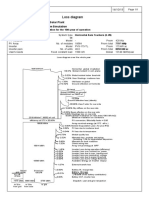
- Loss DiagramDokument1 SeiteLoss DiagramAahd GhafriNoch keine Bewertungen
- EDM and USM of Hard Materials: K. P. Rajurkar University of Nebraska-Lincoln, USADokument85 SeitenEDM and USM of Hard Materials: K. P. Rajurkar University of Nebraska-Lincoln, USAhasib_07Noch keine Bewertungen
- RCA - 05-P521A Shaft FailureDokument40 SeitenRCA - 05-P521A Shaft FailureAnkit SharmaNoch keine Bewertungen
- Failure Mechanisms in Petrochemical IndustryDokument11 SeitenFailure Mechanisms in Petrochemical IndustryGonzalo GómezNoch keine Bewertungen
- J Stead PaperDokument6 SeitenJ Stead PaperixoteeNoch keine Bewertungen
- Customer Seminar Off-Line Testing Using Doble - Manila - March 2018Dokument95 SeitenCustomer Seminar Off-Line Testing Using Doble - Manila - March 2018Jay KuizonNoch keine Bewertungen
- Upgrade Your Motors From Non-IE To IE3Dokument28 SeitenUpgrade Your Motors From Non-IE To IE3Mohamed AskarNoch keine Bewertungen
- Machine Tool Failure Data Analysis For Condition Monitoring ApplicationDokument9 SeitenMachine Tool Failure Data Analysis For Condition Monitoring ApplicationKirubel MulugetaNoch keine Bewertungen
- 2KJ3110-1HL23-4FM1-Z D01+G25+H08+K01+K06+L02+L75+M56 Datasheet enDokument1 Seite2KJ3110-1HL23-4FM1-Z D01+G25+H08+K01+K06+L02+L75+M56 Datasheet enpanca_26Noch keine Bewertungen
- Fault Zone Analysis "ROTOR"Dokument8 SeitenFault Zone Analysis "ROTOR"abhe prasetyaNoch keine Bewertungen
- PV Syst 66 5MWp DC 49 94MW AC Trina 540Wp Module Solis 220kW String InveDokument6 SeitenPV Syst 66 5MWp DC 49 94MW AC Trina 540Wp Module Solis 220kW String InveMeHuL PNoch keine Bewertungen
- Energy Conservation Measures in Industrial Drives Through Selection, Operation and MaintenanceDokument10 SeitenEnergy Conservation Measures in Industrial Drives Through Selection, Operation and Maintenancemorshad61Noch keine Bewertungen
- Hydraulic Unbalance in Oil Injected Twin Rotary Screw Compressor Vibration Analysis (A Case History Related To Iran Oil Industries)Dokument7 SeitenHydraulic Unbalance in Oil Injected Twin Rotary Screw Compressor Vibration Analysis (A Case History Related To Iran Oil Industries)Conifer YuNoch keine Bewertungen
- 6-1. Troubleshooting ELEC 140-9SDokument99 Seiten6-1. Troubleshooting ELEC 140-9SJoseph Emmanuel ParedesNoch keine Bewertungen
- Factsheet Common Causes of Gearbox Failure5Dokument1 SeiteFactsheet Common Causes of Gearbox Failure5Joaquin Andres Boilet HuertaNoch keine Bewertungen
- ULSAC Model 7-HydroformingDokument11 SeitenULSAC Model 7-HydroformingAnonymous VRspXsmNoch keine Bewertungen
- Automatic Transmission Technology SelectDokument26 SeitenAutomatic Transmission Technology SelectSHAH PRATIK SUNILKUMARNoch keine Bewertungen
- 2KJ3110-1JU23-9AL1-Z D01+G47+K01+K06+L02+L75+M59+N1S Datasheet enDokument1 Seite2KJ3110-1JU23-9AL1-Z D01+G47+K01+K06+L02+L75+M59+N1S Datasheet enLance AyoubNoch keine Bewertungen
- PVsyst Meralco Power House Merlin 105Wp + AbbDokument5 SeitenPVsyst Meralco Power House Merlin 105Wp + AbbMARK ARQUE LACANARIANoch keine Bewertungen
- Instruction Manual: Installation Operation Maintenance Standard AC GeneratorDokument50 SeitenInstruction Manual: Installation Operation Maintenance Standard AC GeneratorВладимирNoch keine Bewertungen
- REAP OUTLINE (Generator and Motor Failure)Dokument30 SeitenREAP OUTLINE (Generator and Motor Failure)Tutorial TeknikNoch keine Bewertungen
- Item # 5RK40GN-CW2E / 5GN30RH, 40 W (1/19 HP) Reversible Gear Motor (30:1 Gear Ratio) (Single-Phase 220/230 VAC)Dokument6 SeitenItem # 5RK40GN-CW2E / 5GN30RH, 40 W (1/19 HP) Reversible Gear Motor (30:1 Gear Ratio) (Single-Phase 220/230 VAC)t1nz mdsNoch keine Bewertungen
- Handbook of Electrical Engineering: For Practitioners in the Oil, Gas and Petrochemical IndustryVon EverandHandbook of Electrical Engineering: For Practitioners in the Oil, Gas and Petrochemical IndustryNoch keine Bewertungen
- Electric Motor Maintenance and Troubleshooting, 2nd EditionVon EverandElectric Motor Maintenance and Troubleshooting, 2nd EditionBewertung: 3 von 5 Sternen3/5 (2)
- Failure Analysis in Engineering ApplicationsVon EverandFailure Analysis in Engineering ApplicationsBewertung: 1 von 5 Sternen1/5 (1)
- Offshore Electrical EngineeringVon EverandOffshore Electrical EngineeringBewertung: 3.5 von 5 Sternen3.5/5 (5)
- SSP 266 28l Tdi Engine With Common Rail InjectionDokument56 SeitenSSP 266 28l Tdi Engine With Common Rail InjectionNhuong Hoang DinhNoch keine Bewertungen
- ML Item DescriptionDokument18 SeitenML Item Descriptionkamal arabNoch keine Bewertungen
- Aircraft Mathematical ModelDokument44 SeitenAircraft Mathematical Modelkathan Irish RNoch keine Bewertungen
- 1.1 ScopeDokument13 Seiten1.1 ScopeagegnehutamiratNoch keine Bewertungen
- 10ta - Brochure - Flypartsguy - Com - 8.2019Dokument5 Seiten10ta - Brochure - Flypartsguy - Com - 8.2019Kurd SkorvskiNoch keine Bewertungen
- 1.2 Background of The StudyDokument1 Seite1.2 Background of The StudyHarold FilomenoNoch keine Bewertungen
- Mtu Series 60 MarineDokument5 SeitenMtu Series 60 MarineMuhammad rizki0% (1)
- Jet Engine 2 of 2020 With RefDokument22 SeitenJet Engine 2 of 2020 With RefPartha Sarathi DattaNoch keine Bewertungen
- Siadis Tips and Tricks - HD - ADDokument35 SeitenSiadis Tips and Tricks - HD - ADumeaverkstadNoch keine Bewertungen
- Man-L21-31 Man BWDokument2 SeitenMan-L21-31 Man BWJef FyuNoch keine Bewertungen
- Diesel GeneratorDokument4 SeitenDiesel GeneratorDeepakSharmaNoch keine Bewertungen
- DieselDokument25 SeitenDieselPragg AggarwalNoch keine Bewertungen
- Spec Cum Boq - D.g.set PDFDokument7 SeitenSpec Cum Boq - D.g.set PDFSharique AkhtarNoch keine Bewertungen
- Honda BF115A, BF130A Outboard Motors Shop Manual.Dokument6 SeitenHonda BF115A, BF130A Outboard Motors Shop Manual.ChrisStainton0% (7)
- 2016 Aisin Seiki Am CatalogDokument249 Seiten2016 Aisin Seiki Am CatalogJuan Almeida100% (4)
- Che325 Tutorial KitDokument10 SeitenChe325 Tutorial KitCharles BaileyNoch keine Bewertungen
- Members Section Common Rail and Camshaftless Engines The MAN B&W ME Engine Air Start SystemDokument3 SeitenMembers Section Common Rail and Camshaftless Engines The MAN B&W ME Engine Air Start SystemArun SNoch keine Bewertungen
- Power Management SystemDokument51 SeitenPower Management Systemsj_hecklers67% (3)
- Tribology in Industry: M.S. Charoo, M.F. WaniDokument7 SeitenTribology in Industry: M.S. Charoo, M.F. Wanisubrahmanyam.knvNoch keine Bewertungen
- Definition of TransportationDokument4 SeitenDefinition of TransportationMohamed Adel Hessin DarwishNoch keine Bewertungen
- Sae Technical Paper Series: Scott Mcneil, Paul Adamovicz and Franz LiederDokument15 SeitenSae Technical Paper Series: Scott Mcneil, Paul Adamovicz and Franz LiedermuradbashirNoch keine Bewertungen
- 365B IiDokument28 Seiten365B IiNemanja Subic100% (2)
- Airvents Catalogue 082015 Eng 1Dokument16 SeitenAirvents Catalogue 082015 Eng 1starykNoch keine Bewertungen
- ATEGO - SpecificationsDokument18 SeitenATEGO - SpecificationsKovács Áron100% (3)
- English CatalogueDokument40 SeitenEnglish CatalogueRagunathan Narayanan100% (1)
- A100-M / H Radial: Currently The Last Word in Single Stage TurbochargingDokument8 SeitenA100-M / H Radial: Currently The Last Word in Single Stage TurbochargingМаксим АгеевNoch keine Bewertungen
- Bosch Pe Injection PumpDokument59 SeitenBosch Pe Injection PumpDavies Emmanuel100% (1)
- BR0000009 - Yale GP15-35AK, TK, RK PDFDokument8 SeitenBR0000009 - Yale GP15-35AK, TK, RK PDFAnh NguyenNoch keine Bewertungen
- TAD870-873VE: Low Cost of OwnershipDokument2 SeitenTAD870-873VE: Low Cost of OwnershipAaravGuptaNoch keine Bewertungen
- 055 - ME8091, ME6602 Automobile Engineering - 2 Marks With Answers 2Dokument16 Seiten055 - ME8091, ME6602 Automobile Engineering - 2 Marks With Answers 2Sujitha SujiNoch keine Bewertungen