1
Control PI de Luminosidad
Caballeros J., Enríquez B., Vilatuña F., Valle A.
Departamento de Eléctrica y Electrónica, Universidad de las Fuerzas Armadas-ESPE
En el interior de la misma se dispone de un foco
Resumen—En este artículo se presenta el diseño y control incandescente para iluminar el interior de la planta. El sensor
de un sistema de luminosidad, que permitan el control de presente para realizar la medición es el LDR.
procesos dinámicos, ofreciendo tiempos de respuesta
rápidos y un proceso de ajuste relativamente simple, a B. Diseño eléctrico y electrónico
través de un controlador PI.
El sistema tiene la e Acondicionamiento del sensor
Palabras clave. — Controlador, PI, luminosidad El circuito descrito a continuación fue implementado para
acondicionar el sensor de luminosidad LDR y consiste en un
I. INTRODUCCIÓN divisor de tensión el cual genera una variación de tensión de 0
a 1.6 voltios a partir de una variación de resistencia del LDR.
Muchos sistemas de control de luz optan por soluciones
complejas de recepción de datos, además de equipos muy
costosos de alta sensibilidad aunque también se encuentran
soluciones simples como el uso de fotorresistencias. En la
actualidad con el avance de la domótica, la automatización de
viviendas implica el desarrollo de sistemas que respondan de
manera inteligente de tal manera que el usuario intervenga lo
menos posible en la ejecución de la tarea de dichos sistemas,
permitiendo en este caso el ahorro de energía.
El algoritmo de control PID consiste de tres modos básicos,
el proporcional, el integral y el derivativo y cuando se usa esta
técnica de control clásico, es necesario decidir cuales modos
Figura 1. Circuito de Acondicionamiento del LDR
serán usados (P, I, o D) y especificar los parámetros o ajustes
para uno de esos modos. Generalmente los algoritmos básicos C. Función de transferencia de la planta.
usados son P, PI o PID, y existiendo una amplia variedad de Selección del tiempo de muestreo
formas y métodos de ajuste de este esquema de control. Debido a que la obtención y procesamiento de la información
requiere cierto tiempo en microsegundos es imposible obtener
Sin embargo, a medida que se exige una mayor precisión en datos instantáneamente, razón por la cual se debe escoger un
el sistema, el ajuste control se hace más difícil sobre todo por el tiempo de muestreo, es decir, cada qué tiempo el sistema
ruido y cuando se presentan retardos, además cuando los obtiene la información del sensor para su posterior análisis y
procesos a controlar son no lineales y el control debiera tener la control.
capacidad de compensar esas no linealidades, el control PID no Para el caso del control de luz se requiere utilizar un tiempo
tiene la capacidad de responder a esto porque asume relaciones de muestreo bajo debido a que se está tratando con un sistema
lineales. sumamente rápido, este de tiempo de muestreo es de gran
importancia para poder visualizar y obtener la función de
II. DESARROLLO transferencia y fue establecido en un valor de 1𝜇𝑠.
A. Diseño físico de la planta
Obtención de la Función de transferencia
La planta tiene las siguientes especificaciones físicas:
Para obtener la función de transferencia de una planta de luz
Largo: 16 cm se realiza un programa en Arduino, mostrado en la Figura 2 el
Ancho: 16 cm cual muestrea los datos provenientes del foco a través del
Alto: 16 cm divisor de tensión con el sensor LDR cada 1𝜇𝑠.
Existen orificios en la planta para poder visualizar el
funcionamiento de la misma, así como también para poder
ingresar perturbaciones al sistema.
2
Realizando sistema de ecuaciones se puede obtener los
valores de α y β.
𝛼 = 230769.6 (3)
𝛽 = 19230.8 (4)
Y reemplazando en la ecuación (5) se obtiene la función de
transferencia mostrada en (6)
𝛼
𝐹𝑇 = (5)
𝑠+𝛽
230769.6
𝐹𝑇 = (6)
𝑠+19230.8
D. Diseño del controlador PI
Para obtener la función del controlador se utilizó la
herramienta PID Tool de Matlab la cual permite importar la
función de transferencia y proporciona diferentes diseños de
Figura 2. Programa obtención de datos. controladores permitiendo elegir el controlador que se ajuste a
los parámetros deseados. Para el control de luz se ha elegido un
Se tomaron 386 muestras en un lapso de 0.386 ms, estas controlador PI con los siguientes parámetros:
muestras son utilizadas para graficar la función de transferencia 𝐾𝑝 = 0.20487 (7)
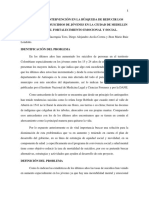
y obtener su respectiva ecuación, la gráfica de la función de 𝐾𝑖 = 3939.8874 (8)
transferencia puede ser apreciada en la Figura 3. Estos parámetros son reemplazados en la ecuación (9)
obteniendo la ecuación (10).
1
𝐺𝐶 = 𝐾𝑝 + 𝐾𝑖 (9)
𝑠
3939.8874
𝐺𝐶 = 0.20487 + (10)
𝑠
Con estos parámetros se puede graficar la función controlada
mostrada en la Figura 4.
Figura 3. Función de Transferencia
Dada la gráfica mostradas en la Figura 3 obtenida en la
interfaz de Scilab se puede obtener los siguientes datos
experimentales.
Ganancia de Estado Estacionario (k):
Amplitud máxima: 355 𝐿𝑈𝑋 o 12 V en 𝑡 =
0.000103 𝑠 Figura 4. Sistema Original y Controlado
Tiempo de establecimiento (2%):
Amplitud para tss: 347.9 𝐿𝑈𝑋 o 11.76 V en 𝑡𝑠𝑠 = Donde se pueden obtener los siguientes parámetros:
0.000085 𝑠 Tiempo de establecimiento: 𝑡𝑠𝑠 = 0.827𝜇𝑠
Tiempo de levantamiento (90%): Tiempo de levantamiento: 𝑡𝑟 = 0.465𝜇𝑠
Amplitud para tr : 319.5 𝐿𝑈𝑋 o 10.8 V en 𝑡𝑟 = Sobre Impulso: 0%
0.000068 𝑠
Constante de tiempo del sistema (63%): Síntesis del controlador PI con amplificadores operacionales
Amplitud para τ : 224.4 𝐿𝑈𝑋 o 7.56 V en τ = Se desea obtener un circuito basado en Amplificadores
0.000052𝑠 Operacionales que realice el mismo desempeño del controlador
PID, pero haciendo el término derivativo igual a cero. Para tal
Para obtener la función de transferencia se reemplazan datos fin se hace uso del circuito mostrado en la Figura 5.
obtenidos en la gráfica mostrada en la Fig. 8 en las ecuaciones
(1) y (2).
1
𝛽= (1)
𝜏
𝛼
𝑘= (2)
𝛽
3
Figura 5. Controlador PI.
Para obtener el valor de los elementos del circuito anterior se
hace uso de las siguientes ecuaciones:
𝑅2
𝐾𝑝 = (11)
𝑅1 Figura 8. Controlador PI para la planta.
1
𝐾𝑖 = (12)
𝑅1𝐶
Para valores comerciales de R y C que cumplan las anteriores
igualdades se tiene que:
R1=10 KΩ
R2=2.5 KΩ
C=100 nF
Para la validación del controlador PI diseñado, se hace uso
del software de simulación ISIS Proteus. En la Figura 6 se
muestra la implementación.
Figura 9. Planta.
IV. CONCLUSIONES
La adquisición de datos debe realizarse sin añadirle
perturbaciones al sistema y a un tiempo de muestreo
suficientemente pequeño para poder observar cambios.
Debe establecerse un rango de acción del sistema ya que
debido a la respuesta logarítmica que tiene el LDR respecto a la
intensidad luminosa existirá un momento en que la variación de
resistencia presente un cambio insignificante en la salida de
voltaje.
Figura 6. Controlador PI para la planta.
Los modelos matemáticos de la planta deben ser lo más
simple posibles y deben reflejar el comportamiento del sistema.
III. RESULTADOS Un controlador PID no siempre es la mejor opción, a veces
controladores más simples como el PI se ajusta mejor a los
La simulación del controlador con sus respectivas etapas y de requerimientos del sistema.
la planta se muestra de la Figura 7 a la 9. Dando como resultado La parte derivativa en un controlador PID a parte de
el control satisfactorio de la intensidad luminosa. disminuir el sobre pico hace que el sistema reaccione más
rápido. En este caso la planta de luz reacciona lo
suficientemente rápido para no necesitar la ayuda de la parte
derivativa del PID.
Se pueden optimizar recursos no solo analizando cual
controlador es mejor para la planta sino también analizando las
salidas de los amplificadores operacionales para saber cuándo
es necesario o no un inversor.
REFERENCIAS
[1] Balaguer, P., V. Alfaro, O. Arrieta, 2011. Second order
inverse response process identification from transient step
Figura 7. Set Point y Restador. response. ISA Transactions, 231-238.
[2] Camacho, O., R. Rojas, W. Garcia-Gabin, 1999.
Variables structure control to inverse response systems with
dead time. ISA Transactions, 87-99. Kupfmuller, K., 1928.
Uber die dynamik der selbsttatigen verstarkungsregler.
Elektrische Nachrichtentechnik, 459 467.
4
[3] Luyben, W., 2003. Identification and tuning of
integrating processes with deadtime and inverse response. Ind.
Eng. Chem. Res., 3030-3035.
[4] Smith, C.A., A.B. Corripio, 1997. Principles and practice
of automatic process control. John Wiley & Sons, New York,
USA. Strecj, V.1959. Approximation aperiodisscher ubertra
gungscharakteristiken. Regelungstechnik, 124-128.
[5] Yuwana, M., D. Seborg, 1982. A new method for on-line
controller. AIChE Journal, 434-440.
Das könnte Ihnen auch gefallen
- Programa para Llenado de TanquesDokument16 SeitenPrograma para Llenado de TanquesDavidVX25Noch keine Bewertungen
- Laboratorio-Sistemas Control Digital-3 PDFDokument5 SeitenLaboratorio-Sistemas Control Digital-3 PDFBoris Benites CalenzaniNoch keine Bewertungen
- Sistemas de Control MIMODokument10 SeitenSistemas de Control MIMONeptaliMuñozNoch keine Bewertungen
- Práctica 6 TermocuplaDokument11 SeitenPráctica 6 TermocuplaFreddy Tamayo0% (1)
- Trabajo Tema 03Dokument21 SeitenTrabajo Tema 03Cärlos Månuel Seguil SolânoNoch keine Bewertungen
- Informe Laboratorio 1 Circuitos OsciladoresDokument11 SeitenInforme Laboratorio 1 Circuitos OsciladoresCarlos Andres Castillo Castellanos (cac2)Noch keine Bewertungen
- Demoduladores FMDokument3 SeitenDemoduladores FMElvin RodríguezNoch keine Bewertungen
- Péndulo Invertido en Espacio de EstadosDokument14 SeitenPéndulo Invertido en Espacio de EstadosTom Sawyer Mark0% (1)
- Estabilidad en Sistemas de ControlDokument17 SeitenEstabilidad en Sistemas de ControlsthefanyNoch keine Bewertungen
- Control Digital Taller 1Dokument3 SeitenControl Digital Taller 1Omar David Peña IbarraNoch keine Bewertungen
- SCR PDFDokument50 SeitenSCR PDFJuan Carlos VegaNoch keine Bewertungen
- Cuadro Comparativo de Lenguajes de Descripcion de HardwareDokument10 SeitenCuadro Comparativo de Lenguajes de Descripcion de HardwareosvaldoNoch keine Bewertungen
- Problemasresueltosparcial 2Dokument20 SeitenProblemasresueltosparcial 2Andrea GarciaNoch keine Bewertungen
- Antena Ranurada Con IntroduccionDokument6 SeitenAntena Ranurada Con IntroduccionRafael CarreroNoch keine Bewertungen
- Amplificadores OperacionalesDokument2 SeitenAmplificadores OperacionalesOscar HernándezNoch keine Bewertungen
- Implementación Sistemas Tiempo DiscretoDokument44 SeitenImplementación Sistemas Tiempo DiscretoDiego AndradeNoch keine Bewertungen
- Aula 5 Filtros Digitales FIRDokument41 SeitenAula 5 Filtros Digitales FIRmar_a_zul25Noch keine Bewertungen
- Informe Final Control IiDokument11 SeitenInforme Final Control Iibrayan vilela villegasNoch keine Bewertungen
- Circuito Voltaje-Corriente Corriente-VoltajeDokument4 SeitenCircuito Voltaje-Corriente Corriente-VoltajePeter0523Noch keine Bewertungen
- FinalPractica 1 Neira Sisa EdyyDokument33 SeitenFinalPractica 1 Neira Sisa EdyySantiNeiraNoch keine Bewertungen
- Lab 06. Diagrama de Bloques DiscretosDokument14 SeitenLab 06. Diagrama de Bloques DiscretosLeonardo VieraNoch keine Bewertungen
- Respuesta A La Función Escalón en Un Circuito R-L-C ParaleloDokument8 SeitenRespuesta A La Función Escalón en Un Circuito R-L-C ParaleloAbel Menendez RamosNoch keine Bewertungen
- Trabajo Señales y SistemasDokument4 SeitenTrabajo Señales y Sistemascaromero270Noch keine Bewertungen
- CuestionarioDokument10 SeitenCuestionario25 Olmedo RenatoNoch keine Bewertungen
- Tema1 AlgebraVectorialDokument58 SeitenTema1 AlgebraVectorialedison gonzalezNoch keine Bewertungen
- CP ST Practica-N6Dokument7 SeitenCP ST Practica-N6SOLIS TIPIAN MARTÍN ALBINONoch keine Bewertungen
- Código BCDDokument4 SeitenCódigo BCDSergio GomoNoch keine Bewertungen
- Ejercicios KarnaughtDokument8 SeitenEjercicios KarnaughtMetzy wordsNoch keine Bewertungen
- Maquinas de EstadoDokument8 SeitenMaquinas de EstadoSergio GuarinNoch keine Bewertungen
- Lab 3 de IntroducionDokument8 SeitenLab 3 de IntroducionRonaldoNoch keine Bewertungen
- Cap 03 Modulacion AM2Dokument21 SeitenCap 03 Modulacion AM2albertwillyNoch keine Bewertungen
- Angulo SolidoDokument3 SeitenAngulo SolidoManuel Andreé Espinoza RosasNoch keine Bewertungen
- DFT y AplicacionesDokument6 SeitenDFT y Aplicacionesel_memeNoch keine Bewertungen
- Identificación de SistemasDokument11 SeitenIdentificación de SistemasauthorNoch keine Bewertungen
- Informe VumetroDokument29 SeitenInforme VumetroRousver Ruben Quicaña Garay0% (1)
- Laboratorio 1Dokument13 SeitenLaboratorio 1ELIAN EDMUNDO ARENAS YATACONoch keine Bewertungen
- Introduccion A MatlabDokument24 SeitenIntroduccion A MatlabJimmy RodríguezNoch keine Bewertungen
- SaDokument22 SeitenSaelvisSHNoch keine Bewertungen
- ServoamplificadorDokument9 SeitenServoamplificadorSCNoch keine Bewertungen
- Diseño de Controladores DigitalesDokument10 SeitenDiseño de Controladores DigitalesbernardoNoch keine Bewertungen
- Introduccion Al Control Robusto Español PDFDokument34 SeitenIntroduccion Al Control Robusto Español PDFFrancisco GomezNoch keine Bewertungen
- Comunicacion Serial SincronaDokument24 SeitenComunicacion Serial Sincronaandres8179Noch keine Bewertungen
- Informe Final Laboratorio N - 3Dokument18 SeitenInforme Final Laboratorio N - 3Michael Alexander0% (1)
- Ejercicios Transformada ZDokument1 SeiteEjercicios Transformada ZRobertoPáezSalgadoNoch keine Bewertungen
- Laboratorio n4 de Sumador Multiplexor y DemultiplexorDokument11 SeitenLaboratorio n4 de Sumador Multiplexor y DemultiplexorSantos Zosimo Ocas GoicocheaNoch keine Bewertungen
- Dipolos y MonopolosDokument22 SeitenDipolos y MonopolosHeribert Gonzalez100% (1)
- Ventana de Kaiser PDFDokument28 SeitenVentana de Kaiser PDFMARILINMAYSONNoch keine Bewertungen
- Movimiento de RototraslacionDokument6 SeitenMovimiento de RototraslacionFranciscoNoch keine Bewertungen
- Termometro DigitalDokument10 SeitenTermometro DigitalJorge SpinaNoch keine Bewertungen
- Preparatorio 3.1Dokument17 SeitenPreparatorio 3.1Vik ToriaNoch keine Bewertungen
- Ejercicio Convolucion Continua - Señales y SistemasDokument4 SeitenEjercicio Convolucion Continua - Señales y SistemasMartinSuarezNoch keine Bewertungen
- Práctica #7 - Automatización IndustrialDokument6 SeitenPráctica #7 - Automatización IndustrialKEvinLalanGui100% (1)
- Canal AWGNDokument3 SeitenCanal AWGNJkyuu Chen100% (1)
- Receptor FMDokument17 SeitenReceptor FMteacirtro_777779991100% (1)
- Taller 1-2. Electronica DigitalDokument1 SeiteTaller 1-2. Electronica DigitalRAY STEVENSON AMAYA MALDONADONoch keine Bewertungen
- Diseño e Implementación de Un Controlador Pid Análogo para Un Motor UniversalDokument7 SeitenDiseño e Implementación de Un Controlador Pid Análogo para Un Motor Universalhhryc7Noch keine Bewertungen
- PR Ctica III ControlDokument7 SeitenPR Ctica III ControlValentina Alvarez VillaNoch keine Bewertungen
- Diseño de Un Controlador PidDokument17 SeitenDiseño de Un Controlador PidBryanHuamanRodriguezNoch keine Bewertungen
- Control Discreto de Un Motor ElectricoDokument4 SeitenControl Discreto de Un Motor ElectricoEric Mosvel100% (4)
- UF1875 - Gestión de recursos, servicios y de la red de comunicacionesVon EverandUF1875 - Gestión de recursos, servicios y de la red de comunicacionesNoch keine Bewertungen
- Epp 2020Dokument30 SeitenEpp 2020fakirjujuyNoch keine Bewertungen
- Concepciones Basicas de Seguridad e Higiene - 0Dokument6 SeitenConcepciones Basicas de Seguridad e Higiene - 0fakirjujuyNoch keine Bewertungen
- Clase 05Dokument12 SeitenClase 05fakirjujuyNoch keine Bewertungen
- 1 Roker Webinar Riesgo ElectricoDokument39 Seiten1 Roker Webinar Riesgo Electricofakirjujuy100% (1)
- Riesgos Eléctricos en La Construcción Libro de Trabajo Del Estudiante Parte 1 de 2Dokument46 SeitenRiesgos Eléctricos en La Construcción Libro de Trabajo Del Estudiante Parte 1 de 2fakirjujuyNoch keine Bewertungen
- Seguridad - Andamios y AsDokument11 SeitenSeguridad - Andamios y AsVicoqNoch keine Bewertungen
- Perspectiva Caballera y El Truco para El Coeficiente de Reducción - 10 en Dibujo - BackupDokument13 SeitenPerspectiva Caballera y El Truco para El Coeficiente de Reducción - 10 en Dibujo - BackupfakirjujuyNoch keine Bewertungen
- Elementos Proteccion PersonalDokument6 SeitenElementos Proteccion PersonalfakirjujuyNoch keine Bewertungen
- 1202 PDFDokument9 Seiten1202 PDFfakirjujuyNoch keine Bewertungen
- Dúplex Full DúplexDokument14 SeitenDúplex Full DúplexfakirjujuyNoch keine Bewertungen
- Memoria Ram y El BusDokument1 SeiteMemoria Ram y El BusfakirjujuyNoch keine Bewertungen
- Trinchero Aromas de Lo Exotico Cap 1 y 2Dokument29 SeitenTrinchero Aromas de Lo Exotico Cap 1 y 2fakirjujuyNoch keine Bewertungen
- Que Son FSB Hypertransport DMI y QPIDokument4 SeitenQue Son FSB Hypertransport DMI y QPIfakirjujuyNoch keine Bewertungen
- Python CodeCombatDokument20 SeitenPython CodeCombatSilvio DepetriNoch keine Bewertungen
- Ensayo Simce Definitivo #1Dokument7 SeitenEnsayo Simce Definitivo #1Carol Camus OlivaresNoch keine Bewertungen
- Hinduismo Segunda Entrega Ficha 3Dokument4 SeitenHinduismo Segunda Entrega Ficha 3juan simonNoch keine Bewertungen
- Cuestionario Popol VuhDokument1 SeiteCuestionario Popol VuhCRISTIAN PAZNoch keine Bewertungen
- Silabo 2021-IiDokument19 SeitenSilabo 2021-IiMANUEL ABRAHAM PAZ Y MIÑO CONDENoch keine Bewertungen
- Prueba Lenguaje 2° BasicoDokument3 SeitenPrueba Lenguaje 2° BasicoMargarita Isabel Navarro GarciaNoch keine Bewertungen
- 15 Canciones VariadasDokument7 Seiten15 Canciones VariadasInternet MegasisNoch keine Bewertungen
- El HesicasmoDokument4 SeitenEl HesicasmoPbro Esteban DíazNoch keine Bewertungen
- Actividad 2. Estado Actual de La ContabilidadDokument11 SeitenActividad 2. Estado Actual de La ContabilidadAdriana SanchezNoch keine Bewertungen
- Procesamiento Por Lotes (Batch)Dokument7 SeitenProcesamiento Por Lotes (Batch)Charly Ru ZiNoch keine Bewertungen
- La PapaDokument8 SeitenLa PapaFC Angel LuisNoch keine Bewertungen
- Final - Dei - Guia Primaria IndigenaDokument71 SeitenFinal - Dei - Guia Primaria IndigenaAmy AlvaradoNoch keine Bewertungen
- Proyecto Sobre El Suicidio en Medellín-ColombiaDokument12 SeitenProyecto Sobre El Suicidio en Medellín-ColombiaDiegoNoch keine Bewertungen
- PucpDokument1 SeitePucpZacarias Felix Rueda HuertaNoch keine Bewertungen
- Libro Sistemas Agroforestales Montagninietal 2015Dokument462 SeitenLibro Sistemas Agroforestales Montagninietal 2015GuitarilusionNoch keine Bewertungen
- Poder Judicial TripticoDokument5 SeitenPoder Judicial Tripticomezacespedes147Noch keine Bewertungen
- TDR - PromotoresDokument2 SeitenTDR - PromotoresJuan Ricardo Quispe BordaNoch keine Bewertungen
- Residuos SolidosDokument32 SeitenResiduos SolidosFiorella EchevarriaNoch keine Bewertungen
- Jurisdicción y Competencia de La Fiscalía de CuentasDokument6 SeitenJurisdicción y Competencia de La Fiscalía de CuentasAlvaro LopezNoch keine Bewertungen
- Fonologia Del QuechuaDokument52 SeitenFonologia Del QuechuaFroilan Lopez MamaniNoch keine Bewertungen
- Tarea1 CostumbresDokument4 SeitenTarea1 Costumbrestania ddaengNoch keine Bewertungen
- Modelo Informe EstadisticoDokument32 SeitenModelo Informe EstadisticoSegundo Elvis Huanca FloresNoch keine Bewertungen
- Modelo Convenio de Practicas 2019-1Dokument2 SeitenModelo Convenio de Practicas 2019-1Branco Joan Flores PinedoNoch keine Bewertungen
- Simbología Del Grado de Aprendiz y Del Tapiz LogialDokument146 SeitenSimbología Del Grado de Aprendiz y Del Tapiz Logialjnunez59Noch keine Bewertungen
- Acceso A ScrumStudyDokument5 SeitenAcceso A ScrumStudyJuan Carlos Ruiz HonoresNoch keine Bewertungen
- Renacimiento Características y Obras de Arte Más Importantes - Cultura GenialDokument1 SeiteRenacimiento Características y Obras de Arte Más Importantes - Cultura GenialALeJanDrO MuÑoz GrANdeNoch keine Bewertungen
- Recolección CRIMINALISTICADokument12 SeitenRecolección CRIMINALISTICAandrea varonNoch keine Bewertungen
- Informe de Test de RavenDokument3 SeitenInforme de Test de RavenMaría Reina FlorentinoNoch keine Bewertungen
- Lectura 14Dokument14 SeitenLectura 14Atalias InfanteNoch keine Bewertungen
- AbortoDokument41 SeitenAbortoSergio JimenezNoch keine Bewertungen