Das könnte Ihnen auch gefallen
- Términos de ReferenciaDokument9 SeitenTérminos de ReferenciaWellington BasilioNoch keine Bewertungen
- Secuencia de Orden de Números NaturalesDokument11 SeitenSecuencia de Orden de Números NaturalesWellington Basilio33% (3)
- EncuestaDokument1 SeiteEncuestaWellington BasilioNoch keine Bewertungen
- CCNA 1 Cisco v6.0 Capítulo 6 - Respuestas Del ExámenDokument3 SeitenCCNA 1 Cisco v6.0 Capítulo 6 - Respuestas Del ExámenWellington BasilioNoch keine Bewertungen
- DefiniciónDokument1 SeiteDefiniciónWellington BasilioNoch keine Bewertungen
- Detector de MetalesDokument4 SeitenDetector de MetalesWellington Basilio100% (1)
- Detector de MetalesDokument4 SeitenDetector de MetalesWellington BasilioNoch keine Bewertungen
- TAREADokument6 SeitenTAREAWellington BasilioNoch keine Bewertungen
- Sensor de VelocidadDokument8 SeitenSensor de VelocidadWellington BasilioNoch keine Bewertungen
- Practica 9Dokument11 SeitenPractica 9Wellington BasilioNoch keine Bewertungen
- Proyecto 3Dokument16 SeitenProyecto 3Wellington BasilioNoch keine Bewertungen
- ITE6Dokument15 SeitenITE6Wellington BasilioNoch keine Bewertungen
- Practica 5 Sistemas DigitalesDokument8 SeitenPractica 5 Sistemas DigitalesWellington BasilioNoch keine Bewertungen
- Microprocesadores Clase 2Dokument20 SeitenMicroprocesadores Clase 2Wellington BasilioNoch keine Bewertungen
- Proyecto de Laboratorio de DigitalesDokument4 SeitenProyecto de Laboratorio de DigitalesWellington BasilioNoch keine Bewertungen
- Passive VoiceDokument11 SeitenPassive VoiceWellington BasilioNoch keine Bewertungen
- Usr HT 104Dokument5 SeitenUsr HT 104carameloo2012Noch keine Bewertungen
- Armonicos EsfericosDokument32 SeitenArmonicos EsfericosDemian LegionNoch keine Bewertungen
- Pract #4 EmulsionesDokument9 SeitenPract #4 EmulsionesDaniel Camilo BustosNoch keine Bewertungen
- Informe de Difusion de MetafisicaDokument39 SeitenInforme de Difusion de MetafisicaSamed Maraza JaliriNoch keine Bewertungen
- Díptico Péndulo FoucaultDokument2 SeitenDíptico Péndulo FoucaultBelén Serra CajasNoch keine Bewertungen
- Capacidad Hidraulica de TuberiasDokument7 SeitenCapacidad Hidraulica de TuberiasWilliams Romero0% (1)
- Apuntes Visión Estética Del Que Hacer Humano PDFDokument2 SeitenApuntes Visión Estética Del Que Hacer Humano PDFCristóbal Avendaño MartinNoch keine Bewertungen
- Analogicos 1Dokument11 SeitenAnalogicos 1Roberto Olmos PimentelNoch keine Bewertungen
- 3 FotoelectricoDokument33 Seiten3 FotoelectricoAsis SaldañaNoch keine Bewertungen
- Ejercicio SifonDokument4 SeitenEjercicio Sifonapolo2364Noch keine Bewertungen
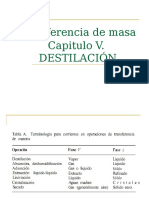
- Clase de Destilación OPU 2015Dokument49 SeitenClase de Destilación OPU 2015José Esneyder Caqui CaballeroNoch keine Bewertungen
- 1.-Tema 2 PDFDokument34 Seiten1.-Tema 2 PDFGofoy SamrtNoch keine Bewertungen
- Ensayos MetalograficosDokument19 SeitenEnsayos MetalograficosWill Gabriel AmbichoNoch keine Bewertungen
- Tema 6 CojinetesDokument46 SeitenTema 6 CojinetesGabriel Alejandro GodoyNoch keine Bewertungen
- Informe 6 Casi CompletoDokument26 SeitenInforme 6 Casi CompletoAlvaro Chavez CastilloNoch keine Bewertungen
- Temas y RespuestasDokument5 SeitenTemas y RespuestasRaquel Aquino SaucedoNoch keine Bewertungen
- Ensayo de Riesgo Electrico y MecanicoDokument4 SeitenEnsayo de Riesgo Electrico y MecanicoSandra Dalina Gonzalez Bonilla100% (1)
- Capacitacion de CianuroDokument36 SeitenCapacitacion de CianuroLuis Christian Davila Cangalaya100% (2)
- Manual SuperProDokument19 SeitenManual SuperProBuenaventura Jose Huamani TalaveranoNoch keine Bewertungen
- Hoja de Seguridad E3f Grout Parte A 1 Hoja de Seguridad - E3f Grout Parte A 1. Identificacion de La Sustancia y La Compañía PDFDokument13 SeitenHoja de Seguridad E3f Grout Parte A 1 Hoja de Seguridad - E3f Grout Parte A 1. Identificacion de La Sustancia y La Compañía PDFDaimerCastroNoch keine Bewertungen
- 22 - 64805 - Espectrofotometro - Mettler Toledo - Uv5 PDFDokument16 Seiten22 - 64805 - Espectrofotometro - Mettler Toledo - Uv5 PDFPatricio GuerreroNoch keine Bewertungen
- Estadística Ejercicios ResueltosDokument4 SeitenEstadística Ejercicios ResueltosDaniel RestrepoNoch keine Bewertungen
- EXAMEN 1RO BimestralDokument2 SeitenEXAMEN 1RO BimestralMisael Zanabria HuanascaNoch keine Bewertungen
- Práctica 1 RefractometriaDokument8 SeitenPráctica 1 RefractometriaFernanda CazaresNoch keine Bewertungen
- LAB - MAQ. ELECTRIC.1 - Dany1Dokument11 SeitenLAB - MAQ. ELECTRIC.1 - Dany1joseNoch keine Bewertungen
- AhreDokument5 SeitenAhreFlorencia LunaNoch keine Bewertungen
- Tipos de ProyeccionesDokument7 SeitenTipos de ProyeccionesPedro Vega ConejerosNoch keine Bewertungen
- Programa de Algebra FamafDokument4 SeitenPrograma de Algebra FamafLore RungaNoch keine Bewertungen
- Cfe Sismo Cfe TanquesDokument28 SeitenCfe Sismo Cfe TanquesJavier Flores100% (2)
- Proyecto de MatematicaDokument19 SeitenProyecto de MatematicaYanetzy Rubio100% (1)