Das könnte Ihnen auch gefallen
- Ejercicios Resueltos Diseño de Controladores (EASY ENGINEERING) PDFDokument24 SeitenEjercicios Resueltos Diseño de Controladores (EASY ENGINEERING) PDFScott MelgarejoNoch keine Bewertungen
- Metodos de SintonizacionDokument14 SeitenMetodos de Sintonizacionejprieto100% (1)
- Reguladores PID Ejercicios ResueltosDokument13 SeitenReguladores PID Ejercicios ResueltosMaría Garrigós100% (1)
- EjerciciosPIDDokument3 SeitenEjerciciosPIDGustavo Circelli100% (2)
- Problemas Resueltos de Control AutomaticoDokument49 SeitenProblemas Resueltos de Control AutomaticoSimon Valbuena100% (1)
- Sintonizacion Por ReleDokument4 SeitenSintonizacion Por ReleCrazyChriz Relikia Creww100% (1)
- Sistemas de Control Avanzado - 1ra EDDokument87 SeitenSistemas de Control Avanzado - 1ra EDE Roy Zapata Z100% (1)
- Problemas Aut2!07!08Dokument5 SeitenProblemas Aut2!07!08Rodrigo RamiroNoch keine Bewertungen
- Sistema de Control Predictivo y CascadaDokument32 SeitenSistema de Control Predictivo y CascadaGeraldine Burgos GonzalesNoch keine Bewertungen
- Apuntes de Control PidDokument134 SeitenApuntes de Control Pidpaulmejiaglz100% (7)
- Control Cascada PlcsDokument4 SeitenControl Cascada PlcsAlex TipantuñaNoch keine Bewertungen
- Ejercicios Resueltos 3er ParcialDokument3 SeitenEjercicios Resueltos 3er ParcialEdwin Santiago Villegas AuquesNoch keine Bewertungen
- Practica 4 PIDDokument11 SeitenPractica 4 PIDCristhiam Flores ZavalaNoch keine Bewertungen
- Automatica Problemas ResueltosDokument355 SeitenAutomatica Problemas ResueltosAlexandro Diaz Coret0% (1)
- Solución de Cuestionario de Control Automático PDFDokument16 SeitenSolución de Cuestionario de Control Automático PDFDavid FLoresNoch keine Bewertungen
- Prácticas de Laboratorio de Sistemas de Control Avanzado PDFDokument38 SeitenPrácticas de Laboratorio de Sistemas de Control Avanzado PDFEduardohrdz HernandezNoch keine Bewertungen
- Sintonizacion Ziegler NicholsDokument21 SeitenSintonizacion Ziegler NicholsMichael Esteban Boggiano Castillo100% (1)
- DISEÑO de Controladores Realimentados Por Ubicacion de Polos y Ceros y Calculo de ObservadoresDokument31 SeitenDISEÑO de Controladores Realimentados Por Ubicacion de Polos y Ceros y Calculo de ObservadoresSamuel Limas MoralesNoch keine Bewertungen
- Sistemas de Control Digital Analisis y Diseño Charles L PhillipsDokument583 SeitenSistemas de Control Digital Analisis y Diseño Charles L PhillipsKaren Lima100% (4)
- Ejercicios Resueltos de Sensores e Instrumentación Industrial-ExamenDokument19 SeitenEjercicios Resueltos de Sensores e Instrumentación Industrial-ExamenDaniel Ruge100% (2)
- Compensadores de AdelantoDokument15 SeitenCompensadores de Adelantosamuel0987516Noch keine Bewertungen
- Metodo de Cohen-CoonDokument5 SeitenMetodo de Cohen-CoonJosue Chris Redfield AvilaNoch keine Bewertungen
- Ejercicios Resueltos RouthDokument2 SeitenEjercicios Resueltos Routhjlola100% (4)
- Reglas Ziegler NicholsDokument11 SeitenReglas Ziegler NicholsMeny Ny100% (2)
- Control Automatico Compensadores Adelanto y AtrasoDokument57 SeitenControl Automatico Compensadores Adelanto y AtrasoAnonymous 7rbDr3bI50% (2)
- Metodos de SintonizacionDokument11 SeitenMetodos de SintonizacionJuanTaipeNoch keine Bewertungen
- 010 - Modelado Fisico Euler - Lagrange ElectricosDokument16 Seiten010 - Modelado Fisico Euler - Lagrange ElectricosGabriel VedderNoch keine Bewertungen
- 05 - Respuesta en El Tiempo de Un Sistema de Control ELTDokument19 Seiten05 - Respuesta en El Tiempo de Un Sistema de Control ELTanderdaNoch keine Bewertungen
- Automatizacion EjerciciosDokument7 SeitenAutomatizacion Ejerciciosapi-32704788250% (2)
- Laboratorio 1 Control DigitalDokument9 SeitenLaboratorio 1 Control DigitalCM35Noch keine Bewertungen
- Apuntes de Control AutomaticoDokument149 SeitenApuntes de Control AutomaticoAlejandroInostroza0% (1)
- Programacion Basica Del PLCDokument14 SeitenProgramacion Basica Del PLCBrian Ubillús RodríguezNoch keine Bewertungen
- Taller PidDokument18 SeitenTaller PidCesar ContrerasNoch keine Bewertungen
- Ejemplo 1Dokument3 SeitenEjemplo 1byron serranoNoch keine Bewertungen
- Control PidDokument10 SeitenControl Pidpiwy017Noch keine Bewertungen
- Sintonizacion de ControladoresDokument31 SeitenSintonizacion de ControladoresGiovanny CifuentesNoch keine Bewertungen
- Taller PIDDokument18 SeitenTaller PIDfrancisco.buitragoNoch keine Bewertungen
- El Controlador PID BasicoDokument9 SeitenEl Controlador PID BasicoAlex Rodríguez VelardeNoch keine Bewertungen
- Taller3 Laines Bravari BenavidesDokument22 SeitenTaller3 Laines Bravari BenavidesLeonardo BenavidesNoch keine Bewertungen
- El Controlador Pid BásicoDokument12 SeitenEl Controlador Pid Básicocesaryfaby22Noch keine Bewertungen
- Métodos de Ziegler y NicholsDokument13 SeitenMétodos de Ziegler y NicholsMontero Luis AlejandroNoch keine Bewertungen
- Análisis Dinámico de Un ControladorDokument32 SeitenAnálisis Dinámico de Un ControladorJuan Roldán Castillo100% (1)
- Ejemplos de Aplicaciones de Control PIDDokument4 SeitenEjemplos de Aplicaciones de Control PIDJazmÍn RamírezNoch keine Bewertungen
- Trabajo Métodos de EntonaciónDokument22 SeitenTrabajo Métodos de EntonaciónCarlos QuintanillaNoch keine Bewertungen
- PIDDokument40 SeitenPIDAlexisVizueteNoch keine Bewertungen
- Grupo 14 Tarea 3Dokument14 SeitenGrupo 14 Tarea 3Miguel Ahumada50% (2)
- Curva de ReacciónDokument11 SeitenCurva de ReacciónMaria Fernanda mollejaNoch keine Bewertungen
- Controladores PidDokument19 SeitenControladores PidFelix Wf MongeNoch keine Bewertungen
- Ingenieria de ControlDokument74 SeitenIngenieria de ControlStalin YaguanaNoch keine Bewertungen
- Control TemperaturaDokument13 SeitenControl TemperaturaMichael Hemar Mamani CalcinNoch keine Bewertungen
- Informe Final Control IiDokument11 SeitenInforme Final Control Iibrayan vilela villegasNoch keine Bewertungen
- Proyecto de Controladores en El Dominio Del TiempoDokument25 SeitenProyecto de Controladores en El Dominio Del TiemponelsonNoch keine Bewertungen
- Laboratorio3 Control DigitalDokument16 SeitenLaboratorio3 Control DigitalCésar Augusto Q. LaverianoNoch keine Bewertungen
- Sec p5 Control Digital 1314a-5205Dokument8 SeitenSec p5 Control Digital 1314a-5205Iván Ivanov0% (1)
- Practicas Control Resumen CompletoDokument36 SeitenPracticas Control Resumen CompletoAlejandro Sánchez GarcésNoch keine Bewertungen
- Tarea 2.1 CaroDokument14 SeitenTarea 2.1 CaroDaniel PancheNoch keine Bewertungen
- Pid Z-NDokument12 SeitenPid Z-NEugenio Hermosilla CorderoNoch keine Bewertungen
- Problemas resueltos de Hidráulica de CanalesVon EverandProblemas resueltos de Hidráulica de CanalesBewertung: 4.5 von 5 Sternen4.5/5 (7)
- Introducción a la dinámica computacional de fluidos (CFD) en Ingeniería Química.Von EverandIntroducción a la dinámica computacional de fluidos (CFD) en Ingeniería Química.Noch keine Bewertungen
- Esquema Eléctrico - Versión 2, ComplementarioDokument9 SeitenEsquema Eléctrico - Versión 2, ComplementarioLeonel Rojas100% (1)
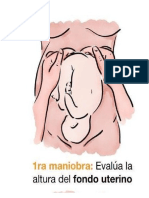
- En Que Consiste Cada Maniobra de LiopolDokument11 SeitenEn Que Consiste Cada Maniobra de LiopolAndres BuesoNoch keine Bewertungen
- RECETASDokument7 SeitenRECETASrocioNoch keine Bewertungen
- ReportDokument1 SeiteReportSindy ArlínNoch keine Bewertungen
- Alcohol Gel Con Dispensador Safepro 200mlDokument1 SeiteAlcohol Gel Con Dispensador Safepro 200mlJesus Barrios CaceresNoch keine Bewertungen
- UMSNH InfografíaDokument1 SeiteUMSNH InfografíaRodrigo PardoNoch keine Bewertungen
- Examen Probabilidad HPDokument5 SeitenExamen Probabilidad HPTatiana RicoNoch keine Bewertungen
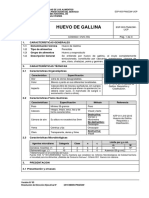
- QALIWARMA, Huevo de Gallina.Dokument3 SeitenQALIWARMA, Huevo de Gallina.Alonzo CustodioNoch keine Bewertungen
- Hoja de Vida Planta CATERPILLARDokument10 SeitenHoja de Vida Planta CATERPILLARJose Alejandro RamirezNoch keine Bewertungen
- Práctica 1, Planos AnatómicosDokument5 SeitenPráctica 1, Planos AnatómicosAlba Torres50% (2)
- Diario116 Entero WebDokument47 SeitenDiario116 Entero WebjpdiaznlNoch keine Bewertungen
- Musculosas Basquet - Búsqueda de GoogleDokument1 SeiteMusculosas Basquet - Búsqueda de GoogleAndrea AlfonsoNoch keine Bewertungen
- UcraniaDokument29 SeitenUcraniayury ortegaNoch keine Bewertungen
- GRUPO 8 Informe Problemática AmbientalDokument16 SeitenGRUPO 8 Informe Problemática AmbientalmelquiadesNoch keine Bewertungen
- Recurso AlzadaDokument26 SeitenRecurso AlzadabeabachiNoch keine Bewertungen
- Estanque Con Agitación PDFDokument105 SeitenEstanque Con Agitación PDFIgnacio Alvarez MendozaNoch keine Bewertungen
- Quimica Fisica, Fisica Atomica y Fisica MolecularDokument21 SeitenQuimica Fisica, Fisica Atomica y Fisica Molecularmanuel vegaNoch keine Bewertungen
- 8.ejercicios EOQDokument6 Seiten8.ejercicios EOQBRIGITH VANESSA ORTIZ PAEZNoch keine Bewertungen
- Organización de ObrasDokument100 SeitenOrganización de ObrasDiego RieraNoch keine Bewertungen
- S02.s2 TAREA GRUPAL - Recursos Renovables y No RenovablesDokument6 SeitenS02.s2 TAREA GRUPAL - Recursos Renovables y No RenovablesAndrea NHNoch keine Bewertungen
- Actividad de Aprendizaje #2Dokument14 SeitenActividad de Aprendizaje #2Elizabeth BarSaNoch keine Bewertungen
- Museo de Arte Contemporaneo NiteroiDokument23 SeitenMuseo de Arte Contemporaneo NiteroiRonald CauichNoch keine Bewertungen
- 5to - Comunicación - Carpeta Recuperación - BraulioDokument30 Seiten5to - Comunicación - Carpeta Recuperación - BraulioJesel NievesNoch keine Bewertungen
- Coi 50 2022 12 15Dokument323 SeitenCoi 50 2022 12 15bryan guiza ojedaNoch keine Bewertungen
- Colitis Dieta PDFDokument2 SeitenColitis Dieta PDFLukeNoch keine Bewertungen
- Pasos para Formatear Una ComputadoraDokument2 SeitenPasos para Formatear Una ComputadoraAngel Matthew de Mirnd-RodNoch keine Bewertungen
- El OzonoDokument7 SeitenEl Ozonoyusneidy valentina quesada gomezNoch keine Bewertungen
- Comput A Bili DadDokument204 SeitenComput A Bili DadRodrigo Románovich FiodorovichNoch keine Bewertungen
- Instrumento de EvaluacionDokument3 SeitenInstrumento de Evaluacionyajaira pereaNoch keine Bewertungen
- Memoria-MÓDULO 3 - IMPLEMENTACIÓN DEL SISTEMA DE GESTIÓN DE SEGURIDAD Y SALUD EN EL TRABAJODokument98 SeitenMemoria-MÓDULO 3 - IMPLEMENTACIÓN DEL SISTEMA DE GESTIÓN DE SEGURIDAD Y SALUD EN EL TRABAJOJose Leon Arteaga100% (1)