Das könnte Ihnen auch gefallen
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- KJLC Ed09 Sec09 Web200910Dokument54 SeitenKJLC Ed09 Sec09 Web200910NickMoloNoch keine Bewertungen
- Manual de Operación Mantenimiento y Partes P375WCU P250WCUDokument160 SeitenManual de Operación Mantenimiento y Partes P375WCU P250WCUPercy Cárdenas100% (2)
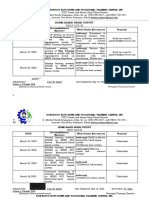
- 1 Home Base Work March 19-MRCH 31Dokument3 Seiten1 Home Base Work March 19-MRCH 31Celso AmotoNoch keine Bewertungen
- Differential Gear MechanismDokument32 SeitenDifferential Gear MechanismMohammad Amir100% (2)
- The Consumers Guideto Choosinga Heat PumpDokument11 SeitenThe Consumers Guideto Choosinga Heat Pumpmishka123Noch keine Bewertungen
- PV6000 Series Hydraulic Variable Pumps: Contact InformationDokument7 SeitenPV6000 Series Hydraulic Variable Pumps: Contact InformationMauricio GuanellaNoch keine Bewertungen
- ProMax 3 BrochureDokument20 SeitenProMax 3 BrochureNila Gama100% (2)
- Unit 1 Solar EnergyDokument176 SeitenUnit 1 Solar EnergyAkhil Dayalu100% (1)
- Drive-Technology: SDA - Spindle Direct Drive ActuatorDokument19 SeitenDrive-Technology: SDA - Spindle Direct Drive ActuatorYAKOVNoch keine Bewertungen
- 1SDC210058L0201 Sace Tmax XTDokument8 Seiten1SDC210058L0201 Sace Tmax XTGrzegorz Greg KrukNoch keine Bewertungen
- Hns 36W 4P Se: Product DatasheetDokument4 SeitenHns 36W 4P Se: Product Datasheetaban Ibis MedicalNoch keine Bewertungen
- Mapúa University: Shop Practice No. 9Dokument5 SeitenMapúa University: Shop Practice No. 9marisonNoch keine Bewertungen
- Storage and Dispensing of High Blend Ethanol Fuels Inc E 85 PDFDokument15 SeitenStorage and Dispensing of High Blend Ethanol Fuels Inc E 85 PDFMurli RamchandranNoch keine Bewertungen
- Solis Certificate IEC&en 62109 1 (2) S6 EH1P (3 8) K L PRO Safety V01Dokument3 SeitenSolis Certificate IEC&en 62109 1 (2) S6 EH1P (3 8) K L PRO Safety V01carrei JohnNoch keine Bewertungen
- Ashrae 90.1-2010Dokument92 SeitenAshrae 90.1-2010asarlakNoch keine Bewertungen
- New Energy Technologies Issue 17Dokument100 SeitenNew Energy Technologies Issue 17blameitontherain9877100% (1)
- UL Cyber ParkDokument9 SeitenUL Cyber ParkGeet RangNoch keine Bewertungen
- How To Avoid Wastage of EnergyDokument1 SeiteHow To Avoid Wastage of EnergyNazrawi IJobsNoch keine Bewertungen
- Engineering Unit 1 Jan 2022Dokument20 SeitenEngineering Unit 1 Jan 2022Subscriptions ram100% (1)
- What Is Pump Priming and Why It Is Required With PDFDokument9 SeitenWhat Is Pump Priming and Why It Is Required With PDFAnas Al’BazzazNoch keine Bewertungen
- P&id LegendDokument1 SeiteP&id Legendkamal arabNoch keine Bewertungen
- Plutonium Nitricum M R7C8Dokument4 SeitenPlutonium Nitricum M R7C8nitkolNoch keine Bewertungen
- Shaffer Et Al. - 2003 - Foraging Effort in Relation To The Constraints ofDokument9 SeitenShaffer Et Al. - 2003 - Foraging Effort in Relation To The Constraints ofBenjamin MendezNoch keine Bewertungen
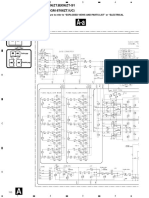
- 3.3 Schematic Diagram (Gm-8706Zt/Uc)Dokument12 Seiten3.3 Schematic Diagram (Gm-8706Zt/Uc)qmarcelNoch keine Bewertungen
- Valeriano - 3-Day Diet RecallDokument5 SeitenValeriano - 3-Day Diet RecallCarl ValerianoNoch keine Bewertungen
- CMG StarsDokument2 SeitenCMG StarsSedighi100% (1)
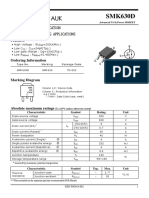
- SMK 630 DDokument8 SeitenSMK 630 DMuhammad Chaidir FhadlyNoch keine Bewertungen
- The Thermodynamic Properties of Platinum: by J. W. ArblasterDokument9 SeitenThe Thermodynamic Properties of Platinum: by J. W. ArblasterEmmanuel PlazaNoch keine Bewertungen
- Bearing MaterialsDokument10 SeitenBearing MaterialsSarath Chandra100% (1)
- Draft CRE Regulations 2019-pdf452019102100AM PDFDokument118 SeitenDraft CRE Regulations 2019-pdf452019102100AM PDFPurna AcharyaNoch keine Bewertungen