Technical Bulletin 08/01
by
Alex Settimi Sohler
Technical Manager
for WEG Australia
S
electing motor protection devices may not be as
straight forward as one may think. Firstly, the
protection must be selected in a way to prevent the
potential disastrous damages of short-circuit currents.
Secondly, it shall be sized to prevent nuisance tripouts caused
by motor inrush current.
Imag
Inrush current is often mistaken by locked rotor current.
According to IEC 60034-1 “locked rotor current is the greatest
steady-state r.m.s. current taken from the line with the motor
held at rest, over all angular positions of its rotor, at rated
voltage and frequency”. When a motor is energised it draws a
high current for the first few cycles (inrush), then if the rotor
remains locked the current stabilizes around its steady state Figure 1: Magnetization curve (Chapman, S ’Electric Machinery
value (locked-rotor current). If the motor is allowed to Fundamentals’. 1991: p 60)
accelerate the current drops until it reaches its rated value
(motor rated current, which is dependent on load). The difficulty in protecting an electric motor and respective
circuit lies in selecting and adjusting a suitable device that
Mathematically the inrush current can be calculated by will not trip due to the high inrush current, but at the same time
analysing the motor’s voltage and flux immediately after will protect the circuit against a true short circuit condition.
energising it. The voltage applied to the motor is: Failure to do so may result in nuisance trips or inadequate
circuit protection. A possible solution is the use of two
v(t) = VM sin (ω + θ) (1) instantaneous trip elements, with different I versus t curves.
The maximum flux amplitude reached on the first half-cycle of
the applied voltage depends on the phase of the voltage at the The amplitude of the inrush and consequently locked rotor
time it is applied. If the initial voltage is current also depends on the X/R ratio of the motor. High
efficiency motors have a lower X/R ratio, hence higher locked
rotor current. Nonetheless, many motor specifications tend to
v(t) = VM sin (ω + 90) = VM cosωt (2)
require a maximum starting current (a terminology incorrectly
used, since there is no formal definition for it) of 600% (the
Supposing the initial flux in the core is zero, the maximum flux
average is 650% to 750%) . This means that manufacturers
during the first half-cycle will equal the flux at steady state (3).
have to increase the motor’s electrical resistance, hence
φmax = VM (3) increasing its overall losses. This has a negative effect on
ωNp motor efficiency, also impacting on motor temperature rise
If the voltage displacement angle θ is 0 then the maximum flux and slip. The only positive about it, apart from the decrease in
at the first half-cycle is locked rotor current, is the increase in motor power factor.
π/ω
φmax = 1 VM sinωt dt = 2VM (4) It is important to note that although AS and IEC standards set
Np ωNp forth limits for motor locked rotor current, there are no limits
0 for inrush current. As a matter of fact, the high inrush current
is a inherent phenomenon to induction motors, and since it
Equation 4 shows that the maximum flux can be twice as high
varies with the angular position of the applied voltage there
as the steady state flux. Examining a motor’s magnetisation
are no standardised ways of measuring it. There are a
curve (see figure 1) it can be seen that a small increase in flux
number of papers that go on to recommend practical rules to
results in an enormous increase in the magnetization current.
selecting and adjusting motor protection devices. We cite
In fact, the inrush current can reach a peak value of
below the recommendation set forth by IEEE 242 standard:
approximately 3 times the motor’s locked rotor current (the
latter is measured in r.m.s.). As it lasts only a few cycles
“For many smaller squirrel-cage induction motors it is usual to
(some milliseconds), it is not normally detected by
set the instantaneous pickup at 10 or 11 times the motor full
conventional meters, but it is sensed by the instantaneous trip
load current.”
elements of circuit breakers, fuses or overcurrent relays, which
may result in tripouts during motor starting.
www.weg.com.br
Das könnte Ihnen auch gefallen
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5795)
- Gold Medallion Assessors Guide v1.2 2023Dokument9 SeitenGold Medallion Assessors Guide v1.2 2023idontlikeebooksNoch keine Bewertungen
- Psar35 m5 Rescue V December 2022Dokument37 SeitenPsar35 m5 Rescue V December 2022idontlikeebooksNoch keine Bewertungen
- AISI Type W2 Tool Steel, Water Quenched at 775°C (1425°F), and TemperedDokument2 SeitenAISI Type W2 Tool Steel, Water Quenched at 775°C (1425°F), and TemperedidontlikeebooksNoch keine Bewertungen
- Water Safety Risk Assessment Guide v1.0Dokument4 SeitenWater Safety Risk Assessment Guide v1.0idontlikeebooksNoch keine Bewertungen
- Bronze Medallion (BM) Theory Questions (Assessment Task 1)Dokument23 SeitenBronze Medallion (BM) Theory Questions (Assessment Task 1)idontlikeebooksNoch keine Bewertungen
- STT Vertimill Retrofit 03282022Dokument2 SeitenSTT Vertimill Retrofit 03282022idontlikeebooksNoch keine Bewertungen
- Lime Slaking 101 Whitepaper 4-06-22Dokument8 SeitenLime Slaking 101 Whitepaper 4-06-22idontlikeebooksNoch keine Bewertungen
- TeSys Giga Contactors - LC1G225KUENDokument5 SeitenTeSys Giga Contactors - LC1G225KUENidontlikeebooksNoch keine Bewertungen
- Memo 2023 Age Championships Water Safety RosterDokument3 SeitenMemo 2023 Age Championships Water Safety RosteridontlikeebooksNoch keine Bewertungen
- 2023 State Age Championships Final Event Information 1Dokument10 Seiten2023 State Age Championships Final Event Information 1idontlikeebooksNoch keine Bewertungen
- Synchronous Machines - Reference ListDokument6 SeitenSynchronous Machines - Reference ListidontlikeebooksNoch keine Bewertungen
- NL48Dokument1 SeiteNL48idontlikeebooksNoch keine Bewertungen
- WEG Indústrias S.A.: Performance Curves Related To SpeedDokument1 SeiteWEG Indústrias S.A.: Performance Curves Related To SpeedidontlikeebooksNoch keine Bewertungen
- ITP - Frames 63 To 355 Low VoltageDokument5 SeitenITP - Frames 63 To 355 Low VoltageidontlikeebooksNoch keine Bewertungen
- WEG Application Book 261 Brochure EnglishDokument33 SeitenWEG Application Book 261 Brochure EnglishidontlikeebooksNoch keine Bewertungen
- Pulp & PaperDokument18 SeitenPulp & PaperidontlikeebooksNoch keine Bewertungen
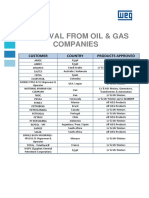
- Oil & Gas - Reference ListDokument1 SeiteOil & Gas - Reference ListidontlikeebooksNoch keine Bewertungen
- ITP - AutomationDokument43 SeitenITP - AutomationidontlikeebooksNoch keine Bewertungen
- Itp - HV MotorsDokument5 SeitenItp - HV MotorsidontlikeebooksNoch keine Bewertungen
- Turbogenerators - Reference ListDokument12 SeitenTurbogenerators - Reference ListidontlikeebooksNoch keine Bewertungen
- Reference List - Drives WAA For Projects 2004-2005Dokument5 SeitenReference List - Drives WAA For Projects 2004-2005idontlikeebooksNoch keine Bewertungen
- Synchronous Motors - Reference ListDokument2 SeitenSynchronous Motors - Reference ListidontlikeebooksNoch keine Bewertungen
- Reference List - WMDokument20 SeitenReference List - WMidontlikeebooksNoch keine Bewertungen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Komatsu Truck Dump HD785-7 Ns A10001Dokument352 SeitenKomatsu Truck Dump HD785-7 Ns A10001Jaime Lopez100% (2)
- Redox Reaction Introduction and Discussion of Theories: Oxidation-Reduction ReactionsDokument9 SeitenRedox Reaction Introduction and Discussion of Theories: Oxidation-Reduction ReactionsMark Darrel AquinoNoch keine Bewertungen
- Exploring Science Edition © Pearson Education Limited 2008Dokument2 SeitenExploring Science Edition © Pearson Education Limited 2008Victor Barber SanchisNoch keine Bewertungen
- Back Corona in ESPDokument4 SeitenBack Corona in ESPewfsd67% (3)
- TM 5-6115-20PDokument193 SeitenTM 5-6115-20PAdvocate100% (1)
- Planetophysical Function of Vacuum Domains (Dmitriev, Dyatlov)Dokument15 SeitenPlanetophysical Function of Vacuum Domains (Dmitriev, Dyatlov)THE NIKOLA TESLA INSTITUTE100% (1)
- LKP CatalogDokument3 SeitenLKP Catalogvikas_ojha54706Noch keine Bewertungen
- Shanghai Greenport MasterplanDokument146 SeitenShanghai Greenport MasterplanApriadi Budi RaharjaNoch keine Bewertungen
- Bedouin Black TentDokument20 SeitenBedouin Black TentKristine Paula Gabrillo TiongNoch keine Bewertungen
- Tda-V 315-1120 Cat015 PDFDokument71 SeitenTda-V 315-1120 Cat015 PDFDak Serik0% (1)
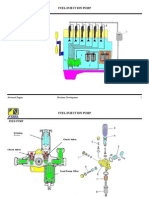
- 4fuel Injection PumpDokument9 Seiten4fuel Injection PumpJoko Sukariono100% (2)
- Minisplit Lennox r22 R410a 10seer PDFDokument4 SeitenMinisplit Lennox r22 R410a 10seer PDFJulian Andres Moreno0% (1)
- Commodity Chemicals - PPT - June2023Dokument40 SeitenCommodity Chemicals - PPT - June2023Sheikh YajidulNoch keine Bewertungen
- Water and Energy Efficient Showers: Project ReportDokument54 SeitenWater and Energy Efficient Showers: Project ReportMurali Krishna KakaraparthiNoch keine Bewertungen
- TV LG 55EC9300+OLED+SMPS+TestingDokument6 SeitenTV LG 55EC9300+OLED+SMPS+Testingwanderson wendellNoch keine Bewertungen
- Bill of Supply For Electricity: BSES Rajdhani Power LimitedDokument2 SeitenBill of Supply For Electricity: BSES Rajdhani Power LimitedVikasNoch keine Bewertungen
- Final Report IOCL GuwahatiDokument17 SeitenFinal Report IOCL GuwahatiSonu KumarNoch keine Bewertungen
- Kieselmann Butterfly Valves InstruktionDokument23 SeitenKieselmann Butterfly Valves InstruktionVLASTAR100% (2)
- Esec Programmable Ultrasonic Module (PUM) Esec Programmable Ultrasonic Module (PUM) GDokument2 SeitenEsec Programmable Ultrasonic Module (PUM) Esec Programmable Ultrasonic Module (PUM) GjerryNoch keine Bewertungen
- Compression Springs: Dimensions According To DIN 2098Dokument9 SeitenCompression Springs: Dimensions According To DIN 2098Андрей МеренковNoch keine Bewertungen
- C4 BMobile RobotsDokument114 SeitenC4 BMobile RobotsMichael DavisNoch keine Bewertungen
- Deventci-R1, A-Lovech Block, North-West BulgariaDokument10 SeitenDeventci-R1, A-Lovech Block, North-West BulgariaLeon100% (1)
- MEROXDokument8 SeitenMEROXZubyr AhmedNoch keine Bewertungen
- Bedini Monopole 3 Group Experiment: Tuning InstructionsDokument8 SeitenBedini Monopole 3 Group Experiment: Tuning InstructionsjurdeNoch keine Bewertungen
- Deputy Engineer ElectricalDokument3 SeitenDeputy Engineer ElectricalSargi BeepumohanNoch keine Bewertungen
- Lesson 2 Commercial Refrigeration and Airconditioning TypesDokument41 SeitenLesson 2 Commercial Refrigeration and Airconditioning TypesEddie AbugNoch keine Bewertungen
- Determination of Certified Relieving CapacitiesDokument6 SeitenDetermination of Certified Relieving CapacitiesGustavo GarciaNoch keine Bewertungen
- Ford Egr ValvesDokument4 SeitenFord Egr ValvesTravis SincombNoch keine Bewertungen
- Active and Reactive Power Control of DFIG Used in WECS Using PI Controller and BacksteppingDokument6 SeitenActive and Reactive Power Control of DFIG Used in WECS Using PI Controller and BacksteppingGzam RaïfaNoch keine Bewertungen
- APGCL-Petition FY 2006-07 PDFDokument70 SeitenAPGCL-Petition FY 2006-07 PDFRahul RoyNoch keine Bewertungen